应用偏相干分析识别混合动力汽车车内噪声源
2019-12-27蓝云翔左言言
蓝云翔,左言言
( 江苏大学 噪声振动研究所,江苏 镇江212013)
对于传统的内燃机汽车来说,车内噪声主要来源于发动机、进排气系统、底盘、行驶的轮胎等。而混合动力汽车(HEV)与传统轿车相比,结构形式发生明显变化,其动力总成系统集成了发动机、驱动机、发动机启停电机、动力耦合机构、主减速器等部件,可实现纯电动运行模式、发动机驱动模式及油电混合驱动模式等工作状态,同时通过增加能量电转换系统及相关部件而提高了能量的利用率。
混合动力汽车的工作特性决定了发动机在汽车运行过程中需频繁地在起动和停机中切换,特别是由电动驱动切换至与发动机共同驱动所引起的瞬态冲击振动现象尤为突出[1-2]。HEV 的驱动模式取决于整车控制策略,即根据车辆负荷需求并结合当前设备工作状态确定发动机和电动机的工作任务[3]。例如在混动模式下发电机、电动机与发动机均处于工作状态,车辆依靠电动机来进行驱动,发动机以低扭矩输出,通过发电机为蓄电池进行充电。发动机与电动机运转时通常有多种噪声源同时并存,而混合动力汽车的主要运转部件包括发动机、电动机、耦合机构等几部分,并且相互之间影响较大[4-5],因此需要使用有效的技术对其噪声影响进行分析。
以某混合动力汽车为对象,针对不同工况,应用偏相干技术进行整车噪声源识别的试验研究。试验中基于偏相干分析确定了影响驾驶员耳旁噪声的主要噪声源,为混合动力汽车的进一步减振降噪提供了依据。
1 偏相干分析理论
1.1 偏相干分析模型
对于混合动力汽车而言,其主要噪声源相互之间并不独立,它们之间的相干性较强,在分析不同噪声源对驾驶员耳边噪声的影响时,不能把这些噪声源认为是独立的,所以需要选择使用偏相干法进行分析[6]。目前用偏相干分析的方法可以计算出两个信号的相干函数[7],把驾驶员右耳噪声作为整个系统响应的输出,就能把问题转化为一个多输入/单输出系统的相干问题[8]。各输入与输出的相干程度即相干函数值越大说明输入对输出的贡献越大,表明该输入是输出的主要来源。
为了对相干振源进行定量识别,建立如图1所示的相干输入下的振源识别模型。

图1 相干输入下的多输入/单输出系统模型
图1中,系统有r个输入,Xi-1!表示X1、X2、···、Xi-1条件下的Xi,即从Xi中去掉受X1、X2、···、Xi-1相关部分的影响的Xi信号。Y为输出信号,Hiy为输出对第i个输入Xi的频响函数,N为外界干扰信号。
1.2 偏相干计算流程
根据图1,可导出条件功率谱的递推表达式[9]
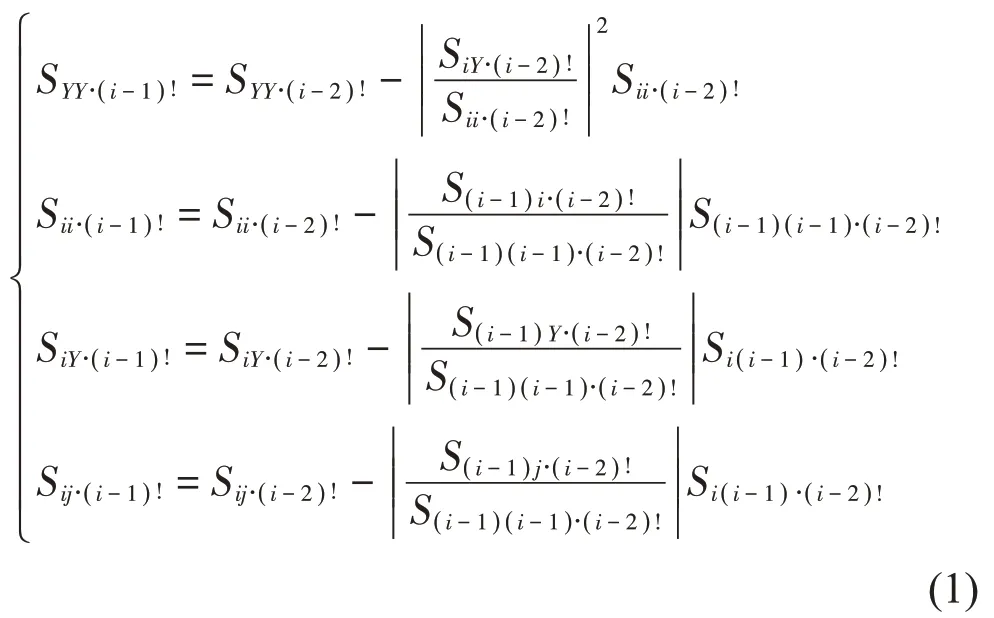
利用图1所示模型,通过条件功率谱和偏相干函数可以进行噪声源识别的计算分析。为减小计算量,采用迭代方法进行偏相干函数计算[10-11]。偏相干函数计算式为

根据式(1)和式(2),应用MATLAB相关功能进行迭代计算就可获得多输入系统中相关声源的偏相干系数,具体计算流程如图2所示。
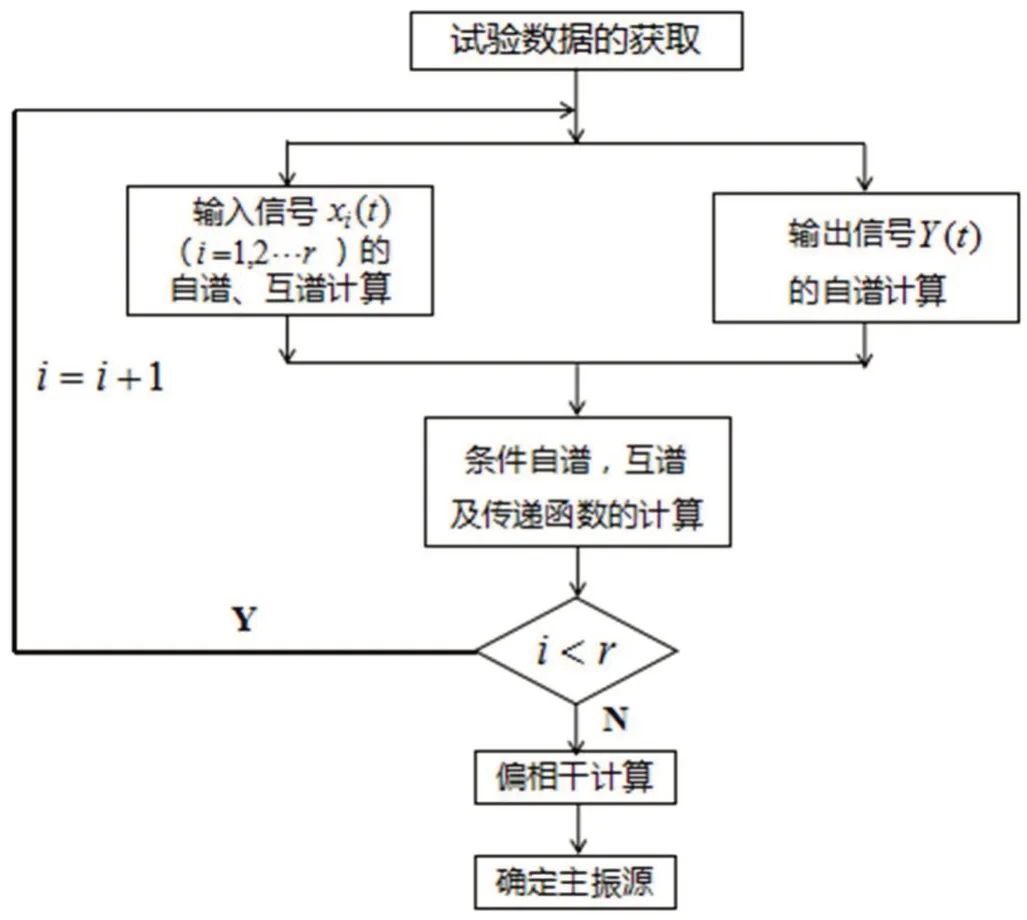
图2 偏相干计算流程
在获得偏相干函数后即可由此分析主要噪声源及各声源对输出的贡献量。
2 试验数据处理与分析
2.1 HEV 噪声试验分析
试验参照国标GB/T 18697-2002[12]《声学汽车车内噪声测量方法》来进行。
试验时,在正驾驶右耳、发动机前悬置、电动机、耦合机构、排气系统及左后轮胎上均布置了传声器。测点布置见表1。

表1 传感器位置
但由于HEV行驶工况不同,其A计权声压级大小与峰值频率均有所不同,故将针对不同的工况对车内噪声进行分析。
2.2 纯电动驱动模式
由于该HEV 采用了电动机与发动机并存的结构设计,在车辆起步或是中低速行驶时可仅依靠电动机驱动,发动机处于关闭或待机状态。在纯电动模式下,在蓄电池SOC 超过设定的阈值时,蓄电池开始向电动机MG2供电,汽车起步或维持中低速行驶,此时发电机MG1与发动机停止运转或待机。选取匀速60 km/h 的工况下驾驶员与驾驶员后排乘客的右耳处A 计权声压级来分析纯电动工况下车内噪声频谱的分布规律,如图3所示。

图3 纯电动模式下车内噪声频谱
从图3可看出,无论前排还是后排,车内噪声主要集中在200 Hz~1 000 Hz 区域,在60 km/h 工况下,噪声基本维持在2 000 Hz 以下,主要出现在35 Hz、117 Hz、355 Hz、468 Hz、893 Hz、1 014 Hz。由于2 000 Hz 以后的车内噪声均在30 dB(A)以下,因此模拟计算车内噪声时,最高计算频率取为2 000 Hz就基本满足要求了。同样发现,在几个峰值频率下,驾驶员右耳处噪声均要比后排左侧乘员右耳处噪声高出1 dB(A)~3 dB(A),所以下面将以驾驶员右耳A计权声压级作为主要研究对象。
2.3 混合驱动模式
在混合驱动模式下,发动机与电动机同时工作,并向该HEV 提供行驶动力。通过该HEV 的控制策略可以发现,发电机MG1、电动机MG2 与发动机均处于工作状态,该车是依靠电动机MG2 来进行驱动,发动机以低扭矩输出,并通过发电机MG1 为蓄电池HV充电。
混合驱动工况下车速为60 km/h 与100 km/h 时驾驶员右耳A计权声压级频谱图如图4所示。
对比图3与图4可以看出,同样在稳态工况(60 km/h)下,在0~2 000 Hz的范围内,混合驱动工况A计权声压级要高于纯电动工况,(如混动工况声压级峰值为61.3 dB(A),而电动工况仅达到50.7 dB(A))但此时峰值频率与纯电动工况时基本一致,均在35 Hz、120 Hz、350 Hz、470 Hz、890 Hz、1 015 Hz附近且相差不超过5 Hz,故文中直接使用混动工况的峰值频率来描述纯电动工况。
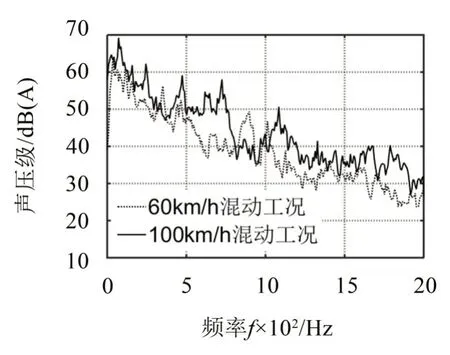
图4 车速为60 km/h与100 km/h时混合驱动车内噪声对比
而将混动工况下60 km/h 与100 km/h 2 种车速工况进行对比不难看出,相对于60 km/h,100 km/h时声压级的峰值频率发生明显变化,峰值频率向中高频范围移动,主要出现在65 Hz、234 Hz、471 Hz、728 Hz、1 085 Hz、1 326 Hz等处,且声压级峰值明显增大。说明即使在相同的工况下该HEV 在不同速度下时的噪声情况也有明显差异。
2.4 发动机驱动模式
在发动机驱动模式下,发动机作为主要的动力输出,蓄电池停止向电动机MG2 供电,发电机MG1停止运转,类似于普通的内燃机轿车。
试验主要对60 km/h匀速工况下纯电动驱动、发动机驱动以及混合驱动3种模式下的噪声频谱分布规律进行研究,3种工况下驾驶员右耳A计权声压级频谱图如图5所示。

图5 3种工况下正驾驶右耳噪声
如图5所示,在稳态工况(60 km/h)下,混合驱动时驾驶员右耳处A计权声压级要高于发动机驱动以及纯电动机驱动两种模式且峰值更加明显。声压级峰值主要出现在0~500Hz与800 Hz~1 200 Hz的低频及中频范围内。
而该HEV在高速行驶状态下,可近似认为HEV处于混合驱动模式工作状态,此时发动机与电动机同时提供驱动力,以发动机驱动车辆行驶为主,电动机起辅助作用,这样既可以保证车辆有足够的行驶动力,又可以降低发动机的载荷输出。
由上文可以得知,车速为60 km/h 时,发动机驱动工况下的噪声峰值低于混合驱动工况,且在高速行驶状态(100 km/h)大多为混合驱动模式,所以本文不再对发动机驱动模式单独进行讨论。
3 偏相干计算分析
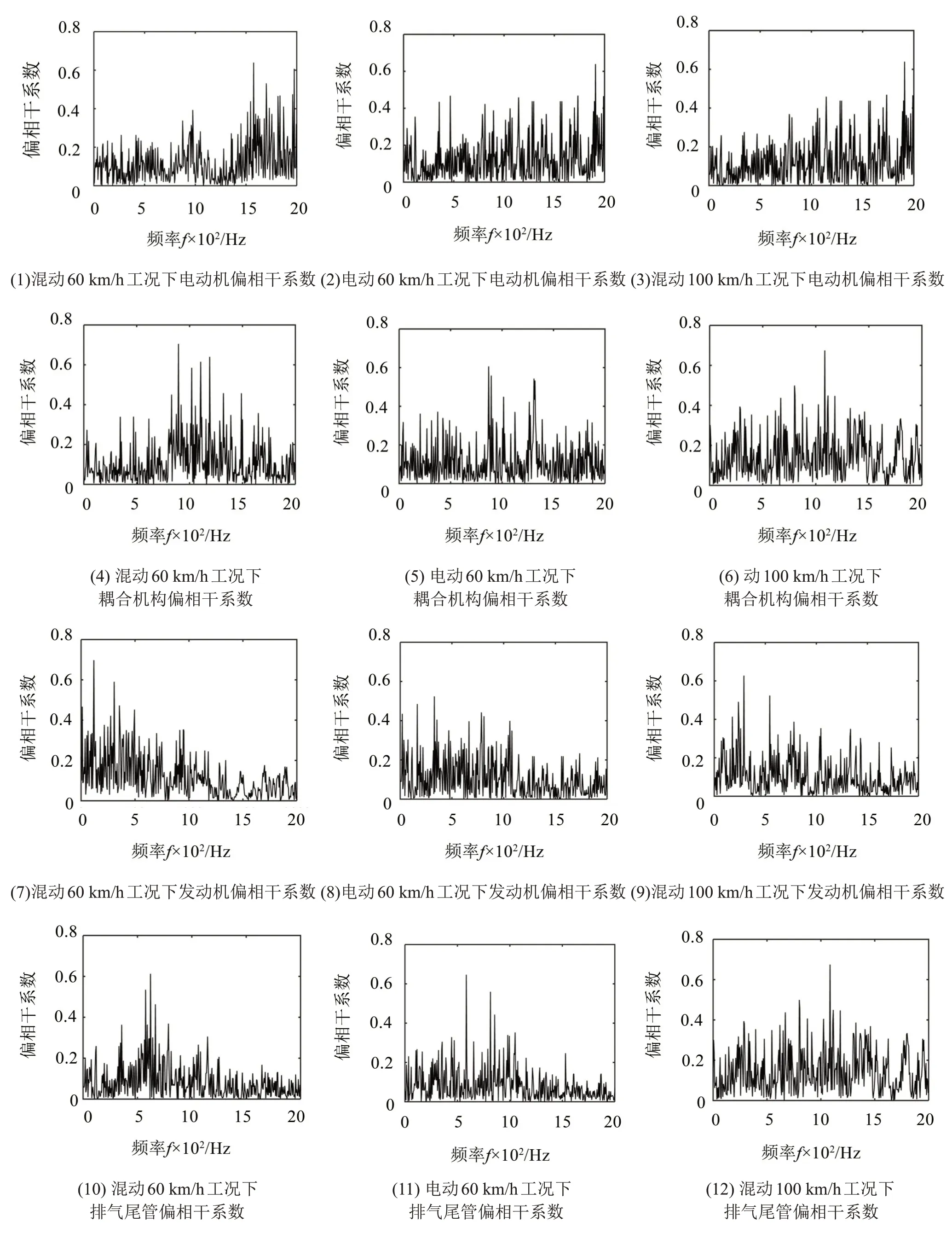
根据上一小节所得的A 计权声压级频谱图,通过MATLAB 相关功能进行迭代计算就可以计算出各输出信号与输入信号之间的偏相干函数。匀速60 km/h 时纯电动工况与混合驱动工况与100 km/h时混合驱动工况下的耦合机构、发动机、电动机、排气尾管以及左后车轮噪声的偏相干函数图如图6所示。图中偏相干系数已经去除了其他输入的影响。
将各主要噪声源在各个峰值频率点处的偏相干系数值列出,如表3、表4、表5所示。
由于A计权声压级峰值集中在0~1 400 Hz内,且在1 400 Hz 以上的高频段中总是小于40 dB(A),故1 400 Hz以上的高频段噪声在文中不做研究。首先观察表3与表4,可以得到:
(1)在低频段(100 Hz 以内),除轮胎外,其余噪声源偏相干系数均比较小。这说明在低频段主要噪声源为轮胎(偏相干系数为0.674、0.413)。
(2)在中频段(100 Hz~600 Hz),各噪声源的偏相干系数在两种工况下出现了明显的不同。在混合驱动工况下,发动机的偏相干系数较高,在117 Hz偏相干系数出现峰值,系数值为0.703。而在纯电动工况下,发动机偏相干系数降低(注:在匀速60 km/h的工况下,即使是在纯电动工况,发动机依然处于工作状态,即待机状态),而电动机的偏相干系数有显著提高,其中在468 Hz 处达到0.497。结合文献[2]可知,这是因为在纯电动工况下,电动机是主要的动力来源,该HEV在300 Hz~630 Hz区间出现的噪声峰值是电动机与发电机的电磁噪声引起的。
(3)在800 Hz~1 200 Hz的中高频段,耦合机构的偏相干系数较高,在893 Hz处附近偏相干系数达到0.705 和0.558,而其余噪声源偏相干系数均比较小。说明在800 Hz~1 200 Hz 范围内,耦合机构为驾驶员右耳处主要噪声源。

表3 混合驱动工况下车速为匀速60 km/h时各主要频率处偏相干系数
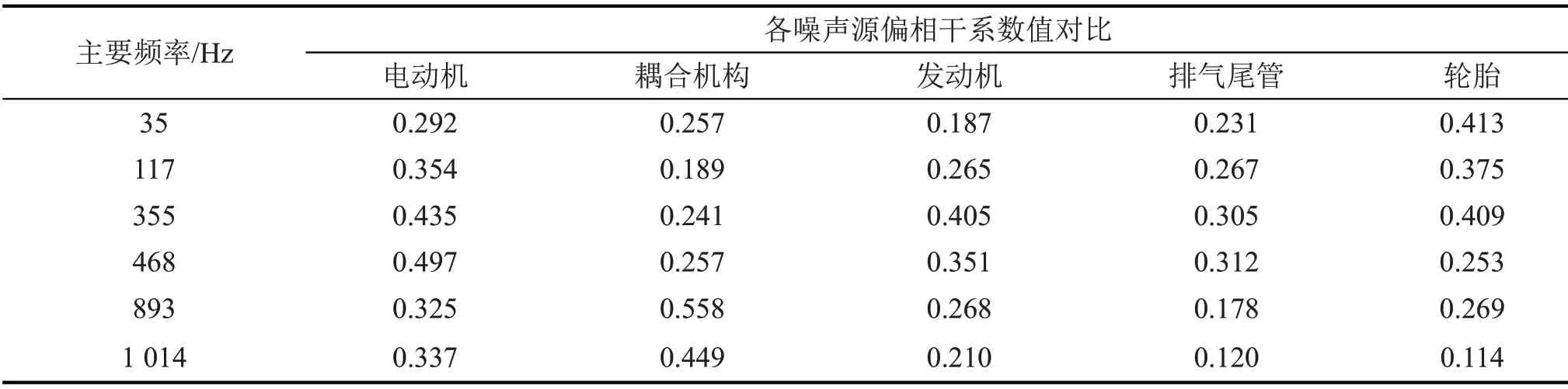
表4 纯电动工况下车速为匀速60 km/h时各主要频率处偏相干系数
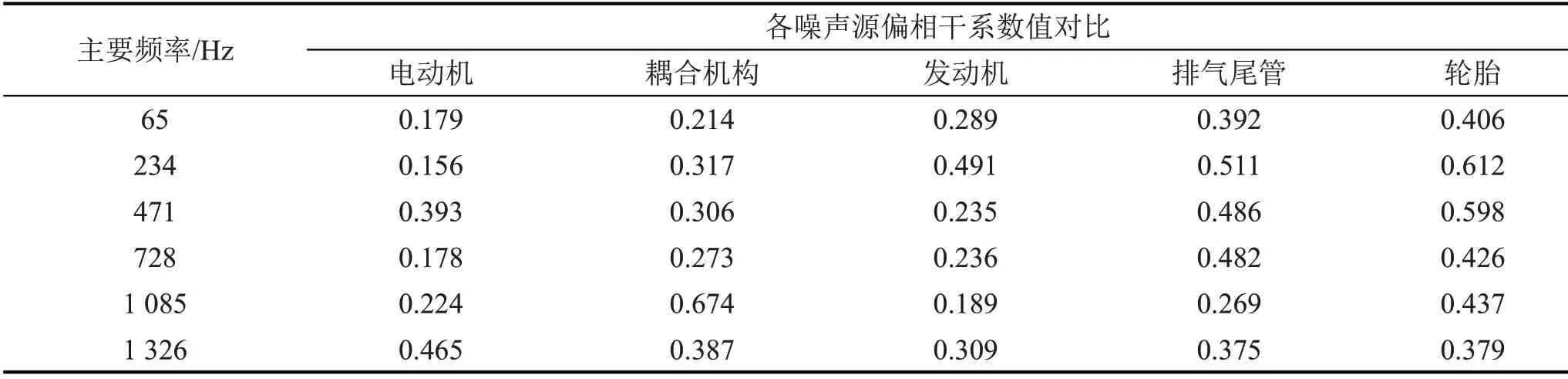
表5 混合驱动工况下车速为匀速100 km/h时各主要频率处偏相干系数
随后观察表5,通过对车速为匀速100 km/h 时混合驱动工况下的各噪声源偏相干系数进行研究,可以得到:
(1)在高速状态下,在各个频段轮胎和排气尾管的偏相干系数相对于低速状态均有明显提高。这是因为在高速状态下,空气噪声取代结构噪声成为主要的噪声来源[9],轮胎和排气尾管对车内噪声贡献比例开始显现并且增大。

图6 不同工况各噪声源偏相干系数
(2)在0~1 000 Hz 的区间范围内,轮胎噪声成为最主要的噪声源,在234 Hz与471 Hz处偏相干系数出现了峰值(0.612与0.598),其次为排气尾管,在234 Hz处出现峰值(0.511)。
(3)在1 000 Hz~1 400 Hz的中高频段,耦合机构依然是最主要的噪声源,在1 085 Hz 附近偏相干系数达到0.674。说明在1 000 Hz~1 400 Hz 范围内,即中高频范围内,耦合机构为驾驶员右耳处主要噪声源。这是由于该车为实现无级变速采用行星齿轮机构,在高速状态下,行星轮的转速可以超过10 000 r/min,这也导致了在中高频段耦合机构影响较大。
4 结语
就某混合动力汽车的噪声问题,建立了声源系统多输入单输出模型,以车速为60 km/h时混合驱动工况、纯电动工况与车速为100 km/h 时混合驱动工况下驾驶员右耳处噪声作为研究对象,在试验测量的基础上采用偏相干分析的方法研究发动机、耦合机构等5个噪声源在不同频段内对驾驶员右耳噪声的影响,通过研究得知:
(1)各个噪声源中偏相干系数峰值均较为明显且与声压级峰值所处频段基本吻合,说明偏相干分析技术可以应用于HEV的噪声源分析,并且可以有效识别噪声源;
(2)在1 000 Hz~1 500 Hz的中高频段区间内,耦合机构在3种工况下均为主要噪声源。
(3)在车速为匀速60 km/h时的纯电动工况下,电动机产生的电磁噪声成为该HEV 的主要噪声来源,尤其集中在300 Hz~630 Hz 的区间范围内。日后可针对电机的转速以及功率角等结构参数进行改进与优化,以减小该HEV的电磁噪声。
(4)在车速为匀速100 km/h时的高速混合驱动工况下,轮胎噪声与排气尾管成为中低频段(0~1 000 Hz 内)的最主要噪声源,所以,在高速行驶工况下,针对轮胎以及排气尾管结构进行优化与改进成为日后研究的主要目标。
