靶肌肉注射医疗辅助装置造型生成模型研究
2019-12-23姜鑫玉周梦媛
姜鑫玉 周梦媛

摘要:中枢神经系统损伤以后,三分之一的患者需要局部肌肉注射肉毒毒素(botulinum toxin,BT)进行治疗肌痉挛。基于数字化模型重建技术超声引导肌肉注射,在空间维度下超声引导注射辅助设备的生成模型研究,增加注射BT的准确度,减少患者疼痛,降低可造成正常肌肉暂时功能丧失等副作用。基于超声引导肌肉注射系统,利用KANO模型分析法、FAST功能分解法获取其医疗辅助装置的需求清单,分析靶肌肉被动运动时肢体在空间中的运动特征并建立运动功能模型。生成痉挛肌肉治疗用途的固定系统模型,建立上肢痉挛治疗固定的设计理论。解决痉挛肌肉治疗时肢体固定问题,为研究全自动靶肌定位穿刺导航系统奠定理论和技术基础。
关键词:靶肌肉注射 医疗辅助装置 KANO模型 造型生成模型
中图分类号:TB47文献标识码:A
文章编号:1003-0069(2019)010-0130-04
前言
对痉挛肌注射肉毒毒素的方式进行脑卒中患者的上肢肌肉痉挛治疗。该种治疗方式的效果与靶肌肉药物注射精确度密切相关,通过对医学专家访谈等方式了解到医学界需要靶肌的定位注射全自动一体化的系统。被注射手臂的固定与信息采集是系统中的重要环节。在注射BT到痉挛肌之前,首先需要定位出需要注射BT的靶肌的运动终板位置。
目前主要定位方法包括徒手、肌电图、电刺激和超声定位。以上定位方式在实际注射过程中,需要医护人员凭经验(徒手定位)或者辅助定位手动操作将注射针剌入靶肌内进行注射,因此需要医护人员丰富的操作经验,操作学习成本高,徒手定位靶肌的精度仅能达到13%到35%,电刺激定位的反复电脉冲增加了患者的痛苦,被刺入的针尖在肌肉内移动会破坏肌肉组织,肌电定位法无法鉴別深部或细小肌肉。针对上述问题,医疗器械辅助系统作为指导工具,可以提供信息推进以辅助医生在手术部位开展操作。具有实时、无创伤、无痛苦和可视等优点的超声定位方法配合自动注射穿刺系统是本研究的大方向。了解并掌握使用者的特征和操作能力,合理分配人与产品的职能是进行医疗器械人性化设计的基础。
一、需求分析
减少穿刺次数和时间,最大程度上减轻患者痛苦,降低治疗的操作难度。为使超声波定位得到的靶肌信息与后续自动注射系统对接,以及注射时减小患者入针局部肢体的位移是注射医疗辅助装置造型生成模型研究的主要内容。
基于超声引导注射系统,探索其医疗辅助装置的造型生成模型。医疗产品设计除了要满足治疗功能的需要,还要以人的生理、心理特征为设计依据。本研究基于Kano模型,从使用者的角度对其需求进行分类和重要性排序。使用者满意度是衡量产品规划成败的重要依据。该模型以分析使用者需求对使用者满意度的影响为基础,体现模型功能与使用者满意度之间的非线性关系。通过Kano模型对使用者进行需求采集以及统计分析,为模型功能定性提供基础依据。其次,将获取的使用者需求指向的模型功能进行分解,即利用模块化思维分解为基于超声图像定位的自动肌肉注射系统相关研究提供辅助;为其他类型治疗所需的固定及导航场景提供理论指导。
(一)装置KANO类别
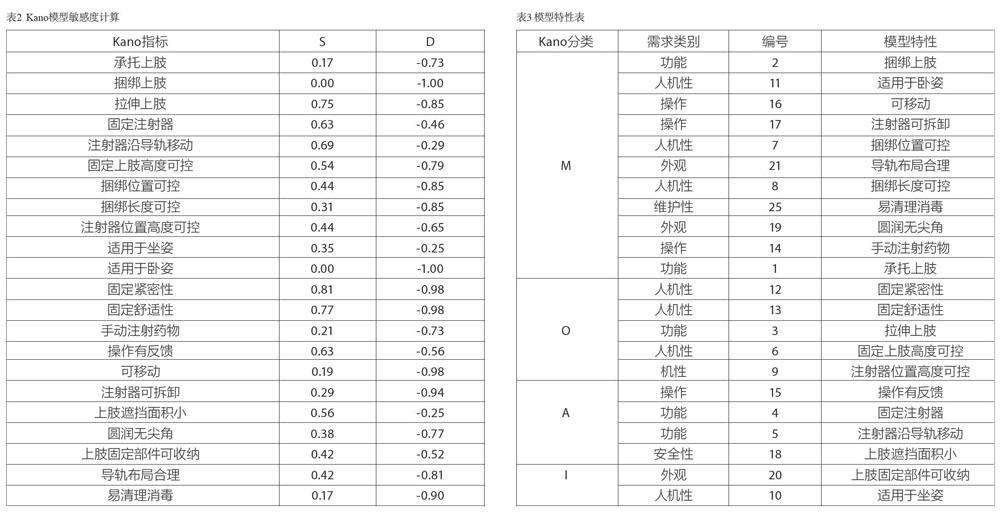
只有真实地获取使用者的需求因子,才能将其赋予到产品设计中满足使用者的需要来达到更高的使用者满意度。通过对超声引导肌肉注射系统操作流程及其技术原理的分析、装置使用环境分析,以及目标患者的心理及生理研究等,获取辅助装置初始需求项。针对每一个需求项目,使用Kano结构问卷进行问题设置。根据KANO模型分析法,得到的装置KANO分类如表]所示。
根据Kano需求模型生成的结果,剔除问题型和反向型需求——“自动注射药物”及“针头隐藏”。在确认需求项目的Kano类别后,对其进行敏感度分析,即通过CS系数的计算,对需求项目优先级进行排序。结果如32所示。
(二)装置模型特性确立
通过对模型特性以及使用者满意度和敏感度的分析,综合筛选出使用者最需要的模型特性,最终模型特性的确定原则是以使用者满意度为主要选择依据,辅之参考影响力敏感度。最终确定的具体使用者特性如表3所示。
二、辅助装置模型
(一)装置功能建模
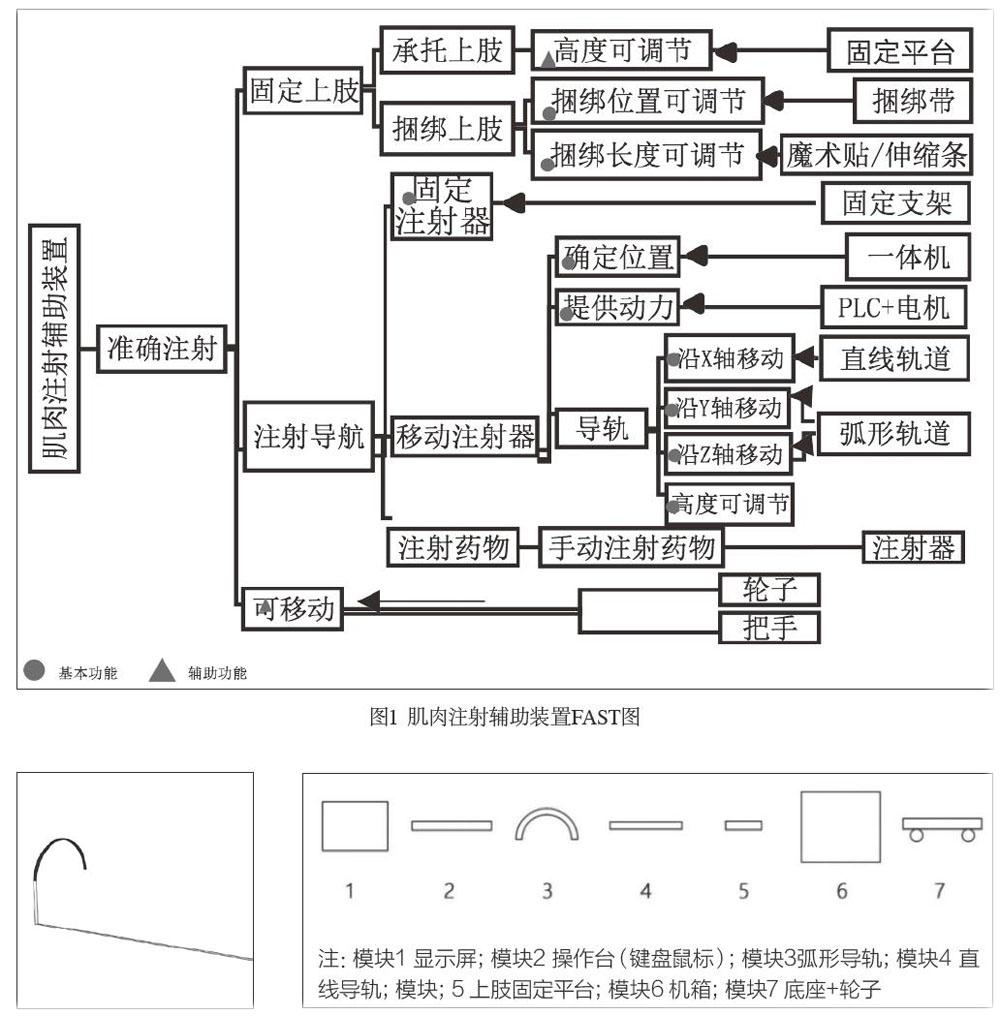
功能树是产品功能分解主要呈现方式之一。FAST(FunctionAnalysis System Technique)功能分析系统技术法强调按照逻辑的顺序对产品的功能进行逐层分析,从而体现产品功能之间的主次以及互相之间的依存关系,如图1。
该辅助装置中注射器的运动是在空间坐标系内的运动,通过直线或曲线运动,到达某点(Xi,Yi,Zi)。在进行肌肉注射时,注射针头与人体皮肤表面应始终垂直。由此可知,注射针在手臂橫截面的运动可以理解为在一个垂直平面内的旋转运动。换言之,注射针整体运动可以分解为一个Y-Z平面内的弧形运动(曲线运动)与一个X轴方向的直线移动的整合,如图2。
综上所述,以肌肉注射辅助装置FAST图对装置进行模块划分:
1)注射器固定模块:注射器固定支架及其与导轨之间的连接部分;
2)导轨模块:直线导轨模块以及弧形导轨模块;
3)操作模塊:电脑屏幕及键盘鼠标部分;
4)机箱模块:电脑主机、PLC控制系统以及电动机;
5)上肢固定模块:捆绑带与固定平台;
6)推手模块:装置可移动的辅助模块。
(二)装置布局设计
依据模块结构组合法,将得到的装置模块进行组合及布局分析,如图3。
从模块布局到模型造型生成的演化过程,共生成A/B/C/D四个模型。其中,模型A将“键盘”操作面与“机箱”分离,以螺栓连接的方式将“上肢固定平台”静态固定在装置主体的机箱部分;模型造型整体采用丁小国角及对称设置,符合装置Kano模型中造型圆润的需求。缺点:上肢平台的固定方式缺乏稳定性,如图4。
模型B突出模型右侧的“上肢放置平台”及“弧形轨道”部分;“底座”的左侧部分比“机箱”主体宽,以消除右侧伸出的“上肢固定平臺”及“轨道”的视觉不平衡性;为了平衡模型整体的重量差和视觉差,加大靠近“上肢固定平台”一侧的轮子直径。缺点:曲面造型增加了加工复杂性与倾斜线的角度不易确定,如图5。
模型C借用倾斜直线生成出直线型模型造型;推手部分与机箱部分为一体设置,如图6。
模型D的注射单元与操作单元处于相对独立的位置,如图7。
四个生成的模型根据产品设计雷达图的方式评价结果如图8:
如上述分析所示,模型D确立为最佳生成模型,将生成后的模型进行优化,最终模型结果如图9:
医疗辅助装置使用场景特殊,在医院大环境之下,产品色需要与环境色相呼应,也需要对病人及医生产生积极的影响。依据“有亲和力的”以及“和平的”情感化意,本文研究的辅助装置整体颜色以白色为主,底座及轮子部分采用较深的灰色,以增加视觉稳定性,蓝色作为装置的有彩色进行局部突出,且颜色采用中饱和度的色彩,如图10。
肌肉注射医疗辅助装置各部分介绍图如图11,该图中装置的部件与前文中对于装置的模块划分相符,并根据需要改变了模块之间的连接方式。
(三)装置设计细节
1.操作控制模块
首先,针对适用于患者左侧和右侧上肢肌肉注射的需求,将显示屏幕及操作键盘等部件设计为可旋转移动的结构,从而在进行不同侧位置转换时,可以进行一定范围内的旋转。同时,旋转结构有助于产品的空间节省,在使用时展开,在不使用时即可旋转收回,以节省空间。旋转收回后的顶视图尺寸图与旋转前使用时的顶视图尺寸图对比如图12。
2.上肢固定模块
上肢固定平台以静态连接的方式固定在竖直方向的调节杆上,进而可以通过下方的圆形旋钮进行高度调节,以适应不同病床高度下的使用需求,如图13。为解决调节杆与产品其他部分缺乏整体感的问题,将调节杆“内嵌”于机箱。
其次,对上肢固定以固定带在金属杆上滑动调节的方式,改变之前调节不连续的缺点。固定带以魔术贴粘贴的方式,可根据患者上肢的不同尺寸进行长短调节。如图14所示,1和2两处均可沿着金属杆滑动,3处为魔术贴。
3.导轨模块
图15为注射器导轨部分细节展示。弧形导轨可以沿着机箱顶部内嵌的直线导轨移动。
另一方面,弧形导轨可以在竖直方向上调节,以适应不同高度需求,如图16。
注射器垂直放入,利用注射器自身的结构特点将其卡住,如图17。这样医务人员仅需一手即可操作;弧形轨道为两侧均可使用,以适应不同侧的操作需求,注射器固定支架也设计为两侧均可放置的样式。
基于患者认知心理,医生熟练操作器械的能力、高效完成手术过程的能力成为患者在手术过程中心理上易出现的恐惧与焦虑的有效缓解信息。优化后的肌肉注射医疗辅助装置各部分模型,装置的部件与前文中对于装置的模块划分相符,并根据使用者需求调整模块之间的连接方式。
结语
痉挛肢体的生物力学特征,运动方式、空间姿态与正常肢体不同,通过被动牵引定位靶肌的方式和自动注射系统对痉挛肢体的固定方式提出了特殊要求,因此传统的医疗固定方法无法满足痉挛肌肉的治疗需要,使得痉挛肢体的固定成为超声定位配合自动注射治疗方式中急需研究解决的一个重要问题。将Kano模型应用于肌肉注射医疗辅助装置模型研究的意义在于,便于对所获取的需求进行分类和排序。对于模型功能的重要性排序能够便于控制在设计过程中工作量的投入程度,从而使得最终生成结果符合现实操作需求。基于辅助装置Kano模型,对装置进行功能分解,从而指导模型模块的划分,并结合模块结构组合法进行模型的布局。最终生成出辅助装置结构和造型模型。
