自适应抑制噪声的压缩感知ISAR成像方法
2019-12-23宋玉娥胡永杰卜红霞
宋玉娥 ,胡永杰, 卜红霞
(1.北京工业职业技术学院,北京 100042;2.河北师范大学,石家庄 050024;3.河北师范大学,石家庄 050024)
0 引 言
逆合成孔径雷达(Inverse Synthetic Aperture Radar, ISAR)是一种能够对非合作机动目标高分辨率成像的雷达,其距离分辨率与发射信号带宽成正比,通常通过发射大带宽信号实现距离高分辨;方位分辨率取决于相干积累时间和目标在雷达视线中转过的角度[1],然而长时间相干积累会产生大量数据,增大成像处理难度,因此只能在分辨率和观测数据量之间进行折中;另外,有时会由于多任务等原因造成观测数据缺损,致使无法实现高分辨成像。为解决以上ISAR成像中数据量与分辨率之间的矛盾以及数据缺损问题,将压缩感知(Compressed Sensing/Compressive Sampling, CS)理论[2-3]引入雷达成像领域,在用比香农-奈奎斯特采样定理要求少得多的观测数据量情况下,获得比传统成像算法更高分辨率的图像[4-7]。
尽管CS-ISAR成像在高信噪比(Signal-Noise rate, SNR)情况下表现良好,但在低SNR情况下会由于噪声的影响产生许多虚假目标,使虚警概率急剧上升,并且图像质量严重恶化。
本文针对低SNR情况,提出一种自适应抑制噪声的舰船目标CS-ISAR成像方法。该方法针对推导的CS-ISAR成像模型,首先根据能量门限分离出不含目标的噪声单元,然后根据分离出的噪声单元估计噪声水平,再根据估计的噪声水平和设定的恒虚警率自适应地调整用于正交匹配追踪(Orthogonal Matched Pursuit, OMP)[8]算法的残差门限,在减少脉冲数情况下利用OMP算法成像。最后通过随机抽取实测数据部分脉冲加入零均值不同方差白噪声形成不同SNR数据进行实验对比与分析,验证所提方法有效性。
1 基于压缩感知(CS)的ISAR成像建模
1.1 ISAR几何模型
逆合成孔径雷达(ISAR)用来对运动目标成像。运动目标相对于雷达的运动可分解为目标姿态相对于雷达视线保持不变的平动分量和目标围绕某基准点转动的转动分量。平动分量对成像无贡献而被补偿,转动分量提供方位向高分辨必需的多普勒信息[9-10]。设在相干积累时间0≤tm≤Ta内,目标转过的角度为θ(tm),因为ISAR成像所需转角很小,成像期间目标近似以匀角速度ω转动,设目标转动中心O到雷达的距离为R0,则散射点(xi,yi)到雷达的瞬时距离为:
Ri(tm)=
R0+yi+xiωtm,
(1)
其中θ0为零时刻散射点(xi,yi)和转动中心O的连线与x轴之间的夹角。
假设系统发射的脉冲信号为线形调频信号:
(2)
其中fdi=2fcxiω/c为散射点的多普勒频率;fdi∈[-Fa/2,Fa/2];Fa为脉冲重复频率也即多普勒带宽。忽略常数相位,沿方位向做傅里叶变换即可得到散射点(xi,yi)在距离-多普勒(Range-Doppler, RD)域中的像[9]:
s(tr,fa)=FT[sm(tr,tm)](fa)=
(3)
由式(3)可知散射点的坐标和散射系数呈现为RD平面目标像的位置和散射强度,通常ISAR图像中目标像仅占像平面的一小部分,像平面中大部分区域为无目标的空白区,像平面具有很强的稀疏性。因此,点目标回波信号经处理变换到RD域成为(3)式所示稀疏信号,符合利用压缩感知(CS)理论稀疏性前提,因此对ISAR可以应用CS理论成像。
1.2 ISAR成像的CS模型
考虑一个距离单元的情况,设在距离单元yi内有K个强散射点和若干弱散射点。ISAR图像反映的是强散射点位置及其散射强度信息,因此弱散射点及杂波干扰被视为噪声处理,强散射点的散射系数分别由Ak(k=1,…,K)表示。假设已完成距离向压缩和运动补偿等处理,则距离单元yi的距离像为
(4)
其中fdk=2fcxkω/c为第k个散射点(xk,yi)的多普勒频率;ni(tm)表示由弱散射点回波及其它杂波等造成的加性噪声。沿方位向做傅里叶变换即可得到目标像
si(fa)=FT[smi(tm)](fa)=
(5)
si=Ψsmi+ni
(6)
其中si为距离单元yi在RD平面内的像;Ψ为Na×Na的傅里叶矩阵,其作用相当于对方位向数据做傅里叶变换;smi为距离单元yi的距离像;ni为噪声向量。将smi由si稀疏表示如下:
smi=Ψ-1si+n′i
(7)
设共有Nr个距离单元,则对每个距离单元进行CS采样如下:
(8)
其中观测矩阵Φ为随机抽取大小为Na×Na的单位矩阵的任意M行所构成的大小为M×Na的随机矩阵,其作用相当于方位向随机抽取。利用CS实现ISAR成像,即将求解欠定方程(8)的问题转化为求解以下优化问题:

i=1,2,…,Nr
(9)

2 CS-ISAR成像算法
2.1 用于CS-ISAR成像的OMP重构算法
目前,求解(9)的稀疏重构算法有很多,其中正交匹配追踪(OMP)算法,因其结构简单容易实现并在重构速度上占优,而得到广泛应用[13]。OMP算法以迭代方式逐渐逼近原始稀疏信号,每次迭代都找出感知矩阵中与当前残差(初始残差即为观测值)最匹配的原子,利用已选出的原子组成支撑集,由此支撑集求得当前近似解,并由当前近似解求得新残差,再由新残差寻找新原子,如此反复迭代直至满足终止条件。
以距离单元yi为例说明OMP算法通过求解(11)式成像的具体过程:
步骤1. 初始化:残差r(0)=smCS(i),支撑集Λ(0)=∅,迭代次数k=1;
步骤3. 更新支撑集:Λ(k)=Λ(k-1)∪{j(k)};
步骤4. 距离单元成像:



由以上求解过程可看出经典OMP算法有两种迭代终止方式:一是迭代次数达到稀疏度K,二是残差达到预设残差门限Th。为加以区分将前者称为稀疏度OMP算法,后者称为残差门限OMP算法。
2.2 CS-ISAR中OMP算法迭代终止条件的设置
OMP算法迭代终止条件直接影响成像质量:预设迭代次数太多或预设残差门限Th太低则难以抑制噪声,容易产生虚假目标,使虚警率提升;反之会导致散射点丢失,使漏警率提升;只有当预设迭代次数或残差门限设置合适,才能既抑制噪声少产生虚假目标又较多地保留有用目标。因此OMP算法迭代终止条件的设置在CS-ISAR成像中至关重要。
在CS-ISAR成像中稀疏度K,即强散射点数目往往未知,因此不适合使用稀疏度OMP算法。由文献[11]可知:对于含有高斯分布噪声的信号而言,若噪声向量为~N(0,σ2IM),其中σ2是噪声的方差,IM是大小为M×M的单位矩阵,则OMP算法中的残差门限正比于根据这一结论可由噪声方差方便求得预设残差门限Th,利用残差门限OMP算法进行CS-ISAR成像。但在实际CS-ISAR成像中,噪声水平一般未知。要应用残差门限OMP算法只能先估计噪声方差σ2,然后根据估计的噪声方差计算预设残差门限Th。为设置合适预设残差门限提出以下方法:
(1) 噪声单元的分离:对于具有稀疏性的ISAR图像,目标散射点通常比较集中且幅值较大,噪声则均匀分散在整个像平面且幅值较小。因此,根据目标及噪声的分布特点,通过能量门限分离出只含噪声的距离单元。用以分离噪声单元的能量门限λE计算如下[14]:
(10)


(11)
(3) 恒虚警残差门限的估算:考虑到噪声情况下会出现虚警,为达到一定的虚警概率Pf,按照分段正交匹配追踪算法设置残差门限的方法[15],根据估计出的噪声方差和设定的虚警概率,设置残差门限OMP迭代终止的残差门限为:
(12)

图1 传统RD成像

2.3 所提CS-ISAR成像方法
通过以上分析,总结由残差门限OMP算法对CS-ISAR数据进行成像的方法流程如下:
步骤1. 按照(10)式计算能量门限λE,分离噪声单元;

步骤4. 应用残差门限OMP重构算法求解(9)式,得到每个距离单元内散射点散射系数向量;
步骤5. 将各个距离单元的散射系数向量合并,形成ISAR图像。
3 实测数据实验
本部分利用实测的舰船目标数据检验所提算法。数据参数如下:岸基雷达发射线性调频信号,中心频率为9.25 GHz,带宽为500 MHz,脉冲宽度为600 μs,脉冲重复频率为200 Hz;目标舰船长度为24 m,雷达和目标舰船之间的距离为6 km,舰船以8 m/s的速度移出雷达视线。实测数据采用Dechirp技术按照香农-奈奎斯特采样定理的要求采集,在观测时间内共发射、采集256个脉冲数据,每个脉冲采集256个距离单元。全脉冲情况下,距离压缩后的距离像和运动补偿后的距离像如图1的(a)和(b)所示,图1(c)是全脉冲情况下传统RD成像结果。本节将分别在不同信噪比和不同脉冲数情况下检验所提方法性能。
3.1 不同信噪比情况下成像对比
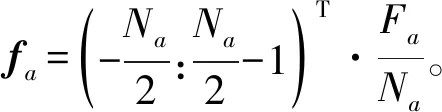
首先用不同信噪比情况下的数据来验证所提方法的性能。实测数据本身具有固定的信噪比(SNR),因此通过向实测数据中增加不同方差高斯白噪声的方法达到不同SNR。实验中随机选取实测数据50%脉冲,加入零均值不同方差的高斯分布白噪声,形成不同信噪比回波信号。作为比较,将50%脉冲不同信噪比情况下传统RD成像结果和稀疏度OMP算法成像结果一并示于图2,其中第一至四行对应的信噪比分别为:5 dB、0 dB、-5 dB和-7 dB。由于稀疏度未知,稀疏度OMP算法中的预设迭代次数依据文献[3]中的经验公式M≥4K设置为脉冲数的四分之一,其中M为观测数据量,K为稀疏度。残差门限OMP算法中的预设残差门限由(14)式计算得出,虚警概率设置为Pf=10-2。
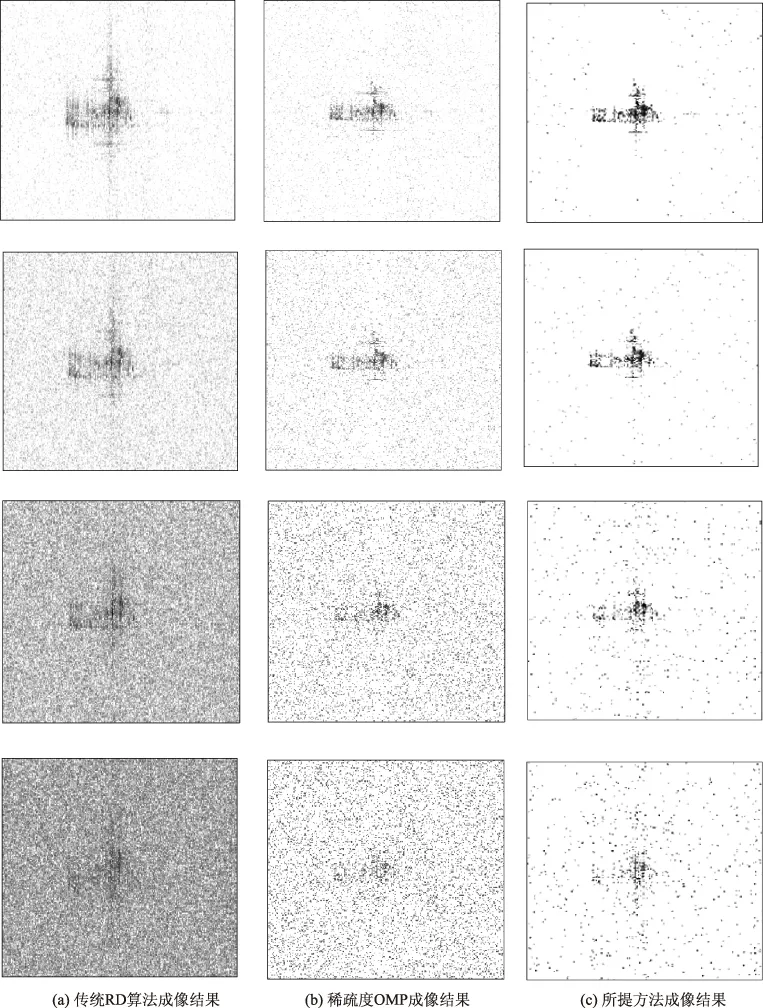
图2 50%脉冲成像结果
从成像结果可以看出:首先,当只用50%脉冲数据成像时,传统RD方法成像结果旁瓣较高出现散焦,图像分辨率降低,而两种OMP算法成像结果中旁瓣得到一定程度抑制聚焦良好;其次,尽管在较高信噪比(SNR≥0 dB)情况下,两种OMP算法均能利用部分脉冲数据清晰成像,但比较而言,所提方法能够更好地抑制噪声,仅产生少量虚假目标,更有利于提取目标信息;另外,随着信噪比的降低,各种成像算法的成像结果中虚假目标均增多,目标图像逐渐被噪声形成的虚假目标所淹没,目标轮廓逐渐模糊,但所提方法抑制噪声的效果依然明显,其对噪声的适应范围更广,在SNR=-5dB时,所提方法成像结果中目标依然可辨,而稀疏度OMP算法则因产生过多虚假目标而失效。实验结果表明所提方法能够很好地抑制噪声,提取出较多的强散射点。
实验中对所提方法中残差门限OMP算法迭代次数做了统计,图3(a)为SNR=5dB情况下的统计结果。可以看出无目标距离单元迭代次数仅为1,有目标的距离单元迭代次数与该距离单元中散射点数目密切相关,散射点数目越多的距离单元迭代次数也越多。这种根据距离单元散射点数目多少自动调整迭代次数的行为,不仅提高了计算效率,而且充分显示了该方法的自适应性。其他信噪比情况下统计结果类似,只是在低信噪比情况下,部分无目标距离单元迭代次数有所增加,如图3(b)所示SNR=-5dB时的统计结果。
3.2 不同数据量情况下成像对比
其次利用不同脉冲数的舰船实测数据对所提方法进行检验。图4示出了RD算法和所提方法在利用不同脉冲数情况下的成像结果。RD算法成像结果中,所有图像旁瓣较高,分辨率低,并且随着脉冲数的减少散焦情况愈加严重;而所提成像方法的成像结果中,舰船目标聚焦清晰,很好地表现目标形状,并且随着脉冲数的减少成像质量下降并不明显。实验结果表明所提方法在较少脉冲数情况下仍能良好聚焦、抑制虚假点的产生、提取较多强散射点。
图3 所提方法迭代次数
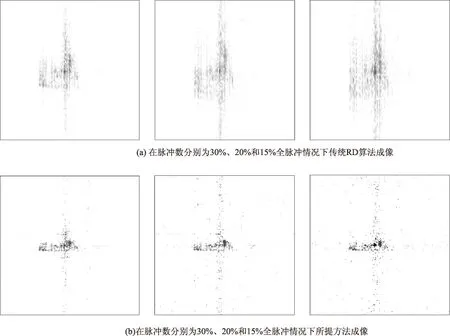
图4 RD算法和所提方法在不同脉冲数情况下成像结果
4 结 语
本文提出了一种自适应抑制噪声的CS-ISAR成像方法。首先,推导了ISAR成像的CS模型;其次在应用OMP算法时,为提高噪声方差估计的准确性,依据能量门限对噪声单元进行分离,然后在残差门限的计算中引入恒虚警概率以提高成像的鲁棒性。由于应用了压缩感知理论和自适应残差门限技术,所提方法可以在减少观测脉冲数的情况下,自适应地抑制噪声干扰,获取高质量ISAR图像。实测数据实验结果证明了所提算法的有效性。
