基于ARM的采摘机械手运动控制及避障研究
2019-12-22王立谦
王立谦,吴 蕾
(武昌首义学院 机电与自动化学院,武汉 430064)
0 引言
近年来,随着人工智能技术的日益成熟,我国不断结合新技术推动农业机械化的发展,致力于减小与发达国家在农业现代化方面的差距。随着农业机械化的不断被重视和飞速发展,各种农业机器人逐渐进入市场,不仅改变了传统的农业劳动方式,而且促进了现代农业的发展。本文对采摘机械手进行了位姿描述和运动学分析,并对机械手运动控制和避障进行了一定的前期理论研究,对设计出具有人工智能的采摘机器人具有一定的参考意义。
1 机械手运动学分析
机械手是采摘机器人的重要组成部分,是保证在复杂环境中开展整个采摘作业的综合性刚体。采摘机械手包含多个可自动运动的关节,各关节都在其坐标系度量下进行运动,为果实的成功抓取提供了基础。因此,在对采摘机械手运动控制及避障进行研究之前,必须提前对机械手位移、速度和加速度等运动学原理进行分析和研究。
图1中,建立原点位于参考坐标系XYZ原点的向量图,则该参考坐标系XYZ可以用3个向量组成的矩阵进行表示,其位姿描述方程式为
(1)
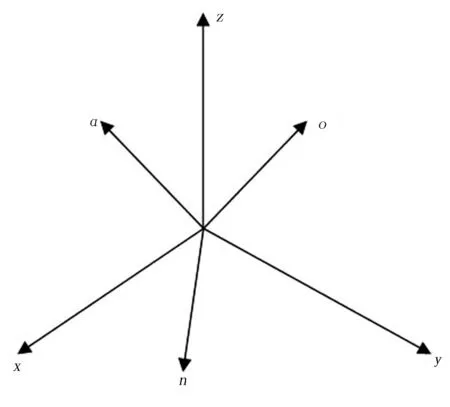
图1 原点位于参考坐标系原点的向量表示图
倘若原点不位于参考坐标系XYZ原点中,如图2所示。

图2 原点不位于参考坐标系原点的向量表示图
则该参考坐标系XYZ可以用4个向量组成的矩阵进行表示,其位姿描述方程式为
(2)

结合前面的对采摘机械手位姿的描述,采摘机械手可以抽象为如图3所示的坐标系。其中,采摘机器人末端执行器的坐标原点代表机械手段位置;以机械手在坐标系Onxnynzn上的投影为其位姿。

图3 采摘机械手位姿坐标系抽象描述
图3中,Oxyz为基础坐标系,一般固定在采摘机器人前端机身上;Onxnynzn为采摘机械手坐标系;n为关节数量。另外,xn、yn、zn分别表示机械手坐标系中法线、位姿及接近的矢量。采摘机械手坐标系和基础坐标系之间关系可以使用余弦R表示,即
(3)
其中,第1、2、3列分别是xn、yn、zn对基础坐标系Oxyz中x、y、z方向的余弦值。一般可以用矩阵Tn表示采摘机械手位置和姿态之间的关系,即
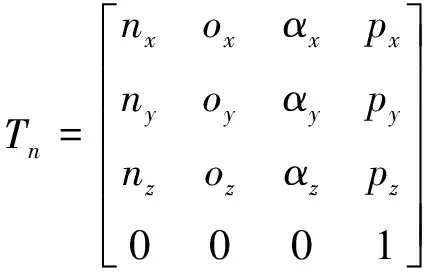
(4)
2 机械手运动控制和避障方法
2.1 运动控制和避障系统的要求
采摘机械手由手臂和末端执行器构成,机械手在作业中实时避开树枝、成功采摘果实,除了依靠机械手灵活的自由度,还需要视觉伺服系统实时对环境的检测,进而将信息传递给处理器,实现对机械手臂和末端执行器的控制。采摘机械手简图如图4所示。

图4 采摘机械手简图
在采摘机械手运动控制系统的研究中,视觉伺服系统非常重要,其根据工业摄像机获取的图像信息,去控制机械手臂和末端执行器与目标果实之间的相对位姿,从而保证果实采摘的准确性。基于图像处理的视觉伺服系统如图5所示。
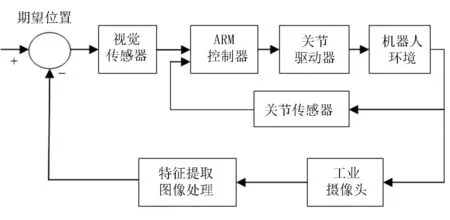
图5 基于图像处理的机械手伺服系统
2.2 采摘机械手运动控制避障系统
采摘机械手在抓取果实的过程中,总会遇到一些果枝、叶子、非目标果实等障碍物的遮挡,因此采摘机械手运动控制最重要的部分是对采摘机械手进行避障路径规划。本文研究的采摘机械手为4自由度:第1个自动度是固定在机器人上的,主要是用来调整机械手的高度;第4个自由度是用来抓取目标果实,即采摘机械手的末端执行器;第2、3自由度为机械手将末端执行器顺利移动至目标果实位置。因此,在整个避障策略中,只需要考虑第2、3自由度。采摘机械手运动控制避障模型如图6所示。
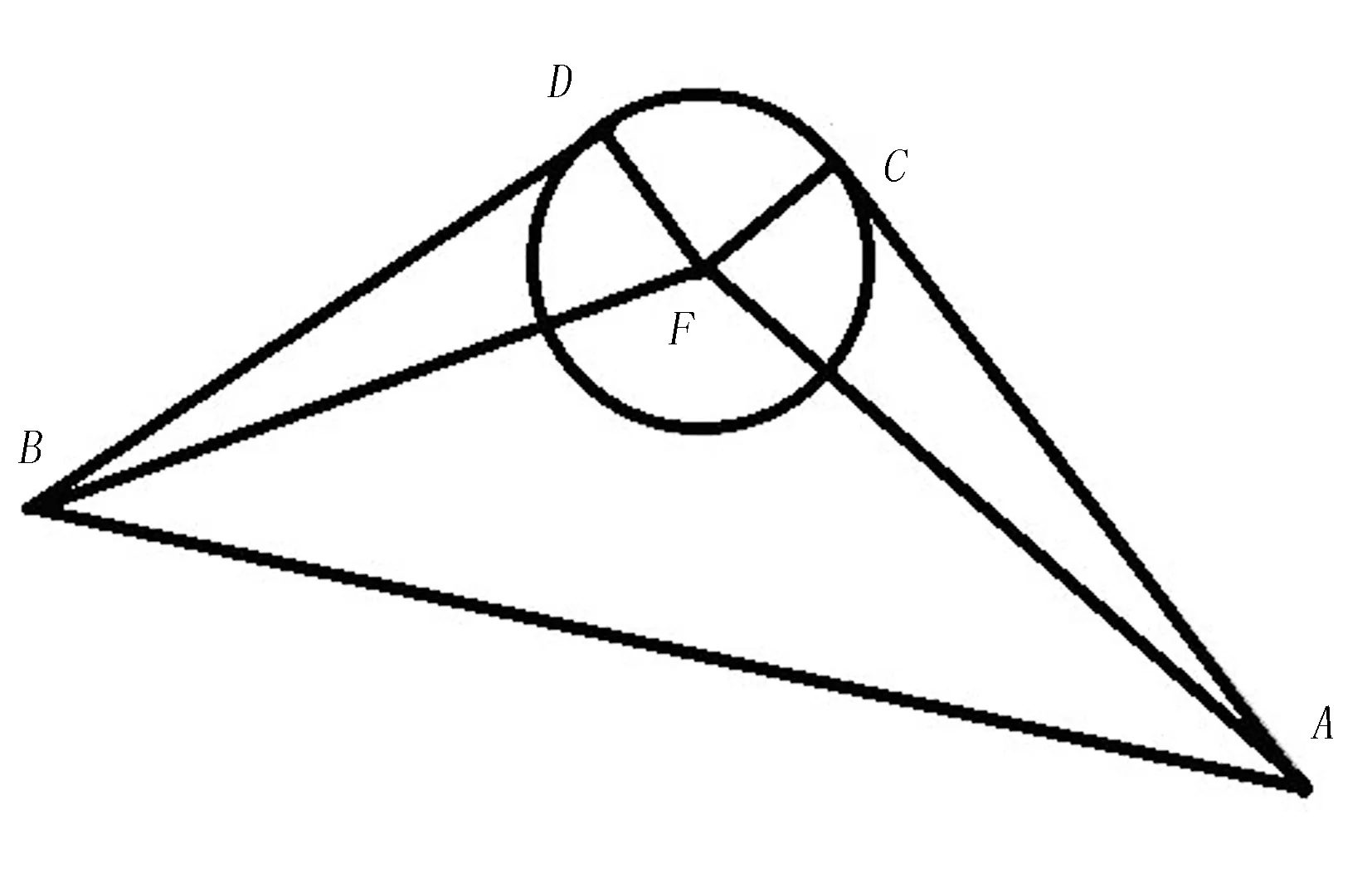
图6 采摘机械手运动控制避障模型
图6中,设定A(x1,y1)为采摘机械手末端执行器起点,B(x2,y2)为目标果实所在的位置,C(x3,y3)和D(x4,y4)为采摘机械手末端执行器避开障碍物圆心F需要经过的最短路径,只需要∠DFC最小即可。假设∠DFC=θ,∠AFB=α, ∠AFC=β, ∠BFD=γ,则
(13)
在△AFB中,有
(14)
在△AFC中,有
(15)
在△BFD中,有
(16)
根据θ=2π-α-β-γ,求出∠DFC,就能实现采摘机械手避障的最优路径。
3 采摘机械手运动控制系统硬软件设计
采摘机器人在采摘作业中,需要准确无误地对目标物体进行采摘作业,因此需要机械手配合视觉伺服系统进行操作,系统采用ATMEGA128为核心处理器。本文设计的机械手运动控制系统主要包括主控制模块、驱动模块、视觉系统和反馈模块4部分,如图7所示。
采摘机械手控制系统的设计一般需要满足一般小型化、轻型化和模块化等需求,因此在设计完成的机械结构时,搭建好硬件平台,还需要采用模块化的思想设计好软件驱动。机械手角度调整子程序流程如8所示。
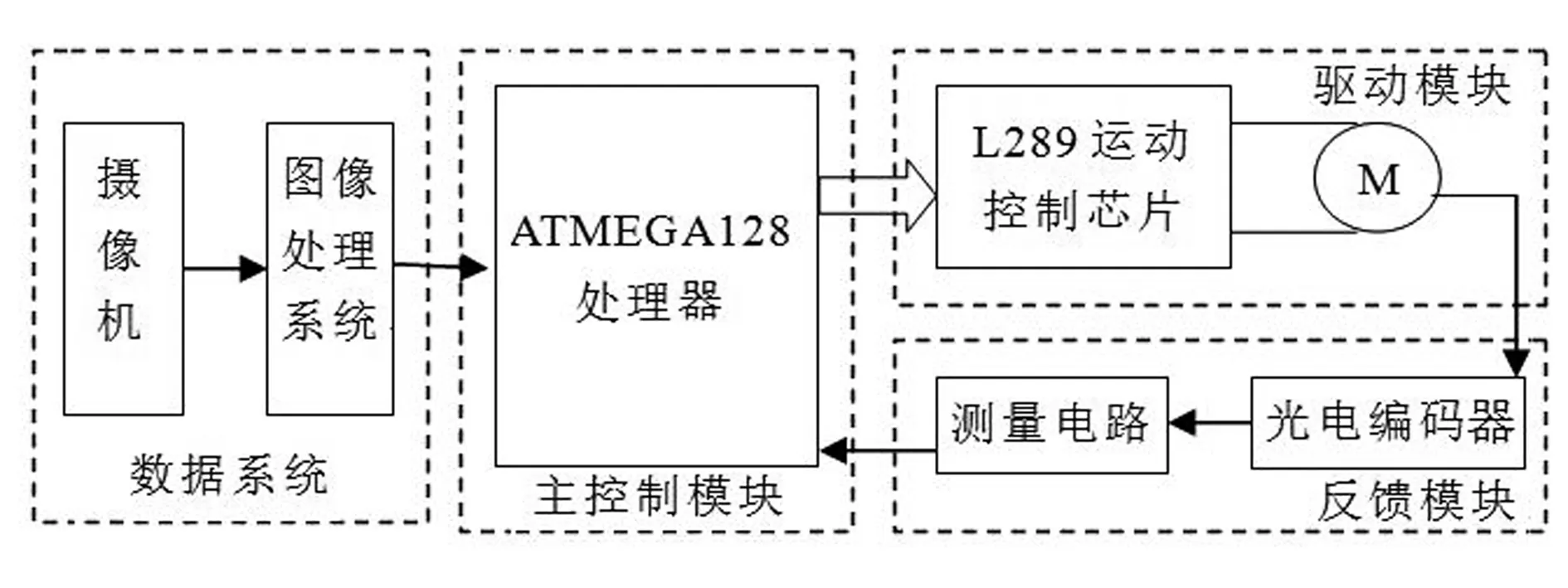
图7 采摘机器人的电路控制框架图
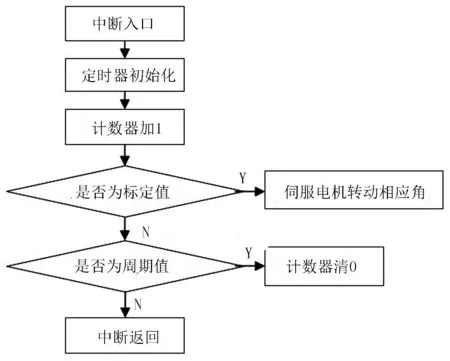
图8 机械手角度调整子程序流程图
4 实验结果分析
为了验证本文设计的采摘机械手运动控制及避障系统是否否和设计要求,也为了检测该系统的实时性、稳定性和可靠性,针对该系统利用MatLab搭建了采摘机械手的仿真系统。实验中,机械手末端执行器起点为(0,0,0),目标终点为(0.55,0.65,0.75)。
采摘机械手运动轨迹如图9所示。图9中,菱形为机械手末端执行器起点,五角星为终点。利用MatLab建立的三维仿真系统,结果表明:采摘机械手末端执行器能够从起点成功运动到终点,且在途中避开中障碍物,达到了预期要求,验证了系统的实时性、稳定性和可靠性。

图9 采摘机械手运动轨迹
5 结论
针对采摘机器人末端执行器在作业过程中容易和树枝、非目标果实发生碰撞这一问题,基于ARM嵌入式控制器和视觉伺服控制策略设计了采摘机械手运动控制及避障系统,并利用MatLab仿真软件进行了采摘机械手末端执行器的三维仿真实验。结果表明:采摘机械手末端执行器能够从起点成功运动到终点,且在途中避开中障碍物,达到了预期要求,验证了系统的实时性、稳定性和可靠性。
