Efficient and accurate online estimation algorithm for zero-effort-miss and time-to-go based on data driven method
2019-12-19HongxiaLIHuijieLIYuanliCAI
Hongxia LI, Huijie LI, Yuanli CAI
School of Electronic and Information Engineering, Xi’an Jiaotong University, Xi’an 710049, China
KEYWORDS
Data driven;
Missile-target separations;
Online estimation;
Time-to-go;
Zero-effort-miss
Abstract This paper introduces a novel and efficient algorithm for online estimation of zero-effortmiss and time-to-go based on data driven method. Only missile-target separations are utilized to construct the estimation models, and a practical Fisher fusion algorithm is derived to acquire the estimates with high accuracy and computational efficiency. Further, the two parameters can be online estimated at a particular time. Meanwhile, the kinematics equations of the missile-target engagement are independent,and assumptions of the missile guidance system dynamics and behaviors of the missile and target are completely out of consideration. Moreover, the effectiveness and applicability are explicitly verified through various simulation scenarios.
1. Introduction
It is well known that zero-effort-miss and time-to-go are two crucial parameters, yet both of them cannot be observed directly and their awful precision might severely affect the effectiveness of missile. Therefore, investigation of proper zero-effort-miss and time-to-go estimates possesses an extremely crucial significance in missile applications. With the zero-effort-miss, previous studies related to its computation issue mainly focus on the analytical solution.A baseline calculation was presented by Zarchan1based upon the nonmaneuvering target. Evidently, the zero-effort-miss can be easily obtained by this technique with satisfactory precision and little computation cost in given circumstance. Afterwards, an improved scheme was developed by Nesline and Zarchan2to account for the maneuvering target, and the target maneuver acceleration level as an additional term was added into the proposed formula. Like the baseline calculation method,the identical virtues can be yielded by this technique when the acceleration level is known in advance. Another analytical method was suggested by Newman3to design the strategic intercept midcourse guidance law. For achievement of the zero-effort-miss estimation under zero gravity circumstance,this routine is established based on these assumptions that both the interceptor and target experience equal acceleration and the target trajectory is linear relative to the interceptor.Identically, the better estimation result can be acquired when the target acceleration is obtained accurately. Meanwhile, a similar method was employed by Zhu et al.4to calculate this parameter and develop a pulsed guidance law for exploring small bodies like comets and asteroids. During this engagement, the relative position and velocity between spacecraft and target asteroid are required, even assuming that the relative velocity is constant and neither the spacecraft nor the target asteroid is accelerating.Unfortunately,for these estimation routines of zero-effort-miss,the simplification of pursuit equations based on a variety of assumptions is inevitable. Therefore, the estimation precision with this parameter is naturally discounted even though high computational efficiency is obtained.
On the other hand, the pioneering works of time-to-go computation are summarized as follows. Among these proposed techniques, one tries to avoid the time-to-go estimation problem or reduce its sensitivity in the guidance law5-8.Apparently,the guidance system is affected less by the inaccurate time-to-go estimation through these approaches. Later,the optimal time-to-go was researched by Glizer9and C.D.Yang and C.C. Yang10based upon an optimal guidance problem with free terminal time. It seems that the optimal time-to-go estimates might be received by this scheme,yet this computation usually involves quite complicated nonlinear equations and the easy solution is heavily defied.Furthermore,the terminal time is difficult to control exactly in endoatmospheric missile applications because missile longitudinal acceleration is neither controllable nor fully acquired in advance. Hence, it is more reasonable to estimate the timeto-go than to control it. The conventional time-to-go calculation method, i.e., the range over the closing velocity, was recognized as an efficient way to provide correct estimates in a collision triangle scenario with constant velocity, even this technique was widely applied by many researchers, e.g., Zhao and Zhou11, Song et al.12, Wang and Lu13, etc. Sadly, this algorithm often suffers from large errors in cases of nonconstant missile velocity and target maneuver. Afterwards, an improved estimation scheme was suggested by Jeon and Lee14,who consider both the heading angle(the angle between the missile velocity and the light-of-sight)and effective navigation ratio based on the traditional one.Since the heading angle has been involved in this scheme, the time-to-go can be correctly calculated in both situations: the missile flies straight along the light-of-sight (the heading angle is zero and regardless of the effective navigation ratio in this case)and along with a slightly curved trajectory (the heading angle is not zero, but small). In view of this, many scholars have indicated special concerns regarding this routine, including Zhao et al.15and Zhao and Yang16. However, the imprecise time-to-go estimates might also be received under the similar circumstances with the traditional one. To mitigate the drawback caused by the varied missile velocity, a recursive methodology was adopted by Baba et al.17, where a piecewise constant acceleration model was taken into account, and the missile velocity variation was compensated by the constant acceleration.Undoubtedly, the correct time-to-go estimates can be yielded under the assumption that the missile always tries to get onto the collision triangle and the initial heading error from the collision triangle is small enough. Unfortunately, the undesired estimates might generate under the large initial heading error.Moreover, the effect of impact angle constraint is fully ignored. This indicates that the satisfactory time-to-go estimates cannot be achieved by this technique for consideration of the mentioned constraint. Aimed at this problem, two time-to-go estimation algorithms were studied by Ryoo et al.18,19to obtain the more accurate ones for the precision guidance law. Concretely, one is given by the length of the curved path over the missile velocity, and the other is the missile-target range over the mean velocity projected on the line of sight.Nevertheless,the accuracy of both the techniques primarily depends on the kinematics equations of homing guidance geometry and the validity of assumption like missile velocity.
Motivated by the previous discussion, to surmount the above weaknesses, a new estimation strategy for both the parameters is designed and can directly deal with the problems of estimation precision and computational efficiency. To derive the proposed estimation algorithm, the precise missiletarget ranges and the corresponding difference sequence are required.Since the amount of these values increases with time,the dynamic models with them are constructed by the effective modeling methods including autoregressive system identification and linear regression analysis.Then,according to the proposed theorem, the estimates with zero-effort-miss and timeto-go for each modeling approach can be yielded. Due to the obtained estimates with different accuracy, we employ the Fisher fusion algorithm to achieve the more precise ones.Notably, the estimation precision with both the parameters will be monotonically enhanced with these increasing separations.
With respect to the previously published zero-effort-miss and time-to-go estimation methods, the proposed estimation scheme could provide several advantages in the following aspects: (A) both the zero-effort-miss and time-to-go can be online estimated simultaneously; (B) only the missile-target separations are required; (C) free of the kinematics equations of missile-target engagement, and without any assumption of the missile guidance system dynamics as well as behavior of the missile and target. To the author’s knowledge, no result on the estimation of the two parameters only depending on the missile-target separations is available till now.The remainder of this paper is organized as follows.In Section 2,the problem statement and theory preliminaries are clearly displayed.Then, derivation of the proposed algorithm is evidently demonstrated in Section 3. Moreover, the simulations and results in various target maneuver situations are presented in Section 4. Finally, the concluding remarks in Section 5 close the paper.
2. Problem statement and preliminaries
2.1. Problem statement

The equation of the motion of the homing problem with maneuvering target is given by

where VMx, VMzand xM, zMare the components of missile velocity and position on x and z axes, respectively; zTMis the relative missile-target separation on z axis and satisfies zTM=zT-zM;D1and D2are two external disturbance terms.Further assume that the major error source involves in target velocity estimation. Mathematically, such uncertainty is described as disturbance.
The zero-effort-miss is defined as the distance that the missile would miss the target if the target continued along its present course and the missile made no further corrective maneuvers1. According to this definition, we can see from Fig.1 that the component of the zero-effort-miss is perpendicular to the LOS,and can be represented as z- tf( ),where tfis the total flight time of the engagement. Meanwhile, time-to-go is the time to go until intercept and plays an important role in most guidance laws, especially the optimal guidance. In view of the importance of both the parameters, a novel online estimation algorithm with them is studied in this paper and clearly investigated in Section 3.
2.2. Preliminaries
In this subsection, the critical theories of the proposed algorithm are apparently exhibited. Exactly, to well understand Lemma 1 and algorithm derivation, we show Definition 1 and a key concept that the Fisher information of a parameter is clearly investigated by this definition. As a significant inequality related to this concept, Lemma 1 is provided to transform the estimation of zero-effort-miss into a minimum problem and enables the proposed algorithm to be successfully derived. For construction of the aforementioned estimation models, the autoregressive system identification and linear regression analysis are employed and their theories are separately appeared in Lemma 2 and Lemma 3.





Proof. According to Cramer-Rao inequality, the following inequality holds



is satisfied,and then the validity of the inequality in Eq.(4)can be guaranteed.


where a1,a2,···,apwith p ≥1 are the forward linear prediction coefficients for order p.
Lemma 3.22Considering that the prediction of dependent variable y on the basis of other independent variables x1,x2,···,xpp ≥1( ) can be modeled by linear regression analysis, the model is given by

where b1,b2,···,bpare the regression coefficients, ε is the random error, and σ2is the variance of ε, i.e., σ2=var ε( ), where var ·() denotes the variance. Note that b1,b2,···,bpand σ2do not depend on xi, i=1,2,···,p.
3.Design of online estimation algorithm for zero-effort-miss and time-to-go
This section deals with the derivation of the estimation algorithm for zero-effort-miss and time-to-go in detail. We firstly establish the estimation models through the two modeling methods using the increased missile-target separations. Next,we propose a significant condition shown in Definition 2 to acquire the components of both the parameters in Section 3.1.Further, Theorem 1 is presented based on the Fisher fusion theory to obtain the formulation of the optimal zero-effortmiss estimation, even the proof with this theorem is provided strictly. Additionally, the time-to-go estimation is also implemented based on the identical theory and displayed in Section 3.2.Finally,to further state the proposed methodology,a flowchart is provided and shown in Fig. 2.
3.1. Online zero-effort-miss estimation


Fig. 2 Flowchart of Fisher fusion algorithm.
Remark 1. Considering large amount of missile-target separations, the sliding window technique can be employed to construct the mentioned models. The length of the sliding window can be chosen to compromise between the precision of models and the running time as well as the storage space.Note that the missile-target range at each time point is adopted in this section to analyze the proposed algorithm in detail.
Remark 2. Note that the number of missile-target separations corresponds to starting time value in real applications,and this time value can be approximately computed by the product of separation length and guidance sampling interval. Therefore,the effect caused by the number of these separations can be fully analyzed through the starting time value. Concretely,the more the missile-target ranges are(i.e.,the larger the starting time value is), the more accurate the estimates with both the parameters are. In addition, the mentioned effect is carefully considered and analyzed in simulation section.

Based upon the obtained missile-target separation at the mth time point Rmand the established models fj,m·(),j=1,2,···,n, the future missile-target separations from the(m+1)th time point to the predicted intercept time point Nj,mcan be estimated by











Based upon Eq. (11) and Definition 1, the Fisher information of rNis given by



On the basis of Lemma 1, the valid estimation of the zeroeffort-miss in Eq. (13) can be transformed into the minimum problem of Eq. (12). Then Eq. (13) can be rewritten as

Theorem 1. Considering the minimum problem Eq. (14), the optimal solution is



Let
Based upon the monotonicity of definite integral, the minimum problem of Eq. (17) can be converted into the similar problem of Eq. (18). And this problem can be exactly described as

Substituting Eq. (18) into Eq. (19) yields
鄂麦398系是湖北省农业科学院粮食作物研究所从杂交组合皖1216/25871//扬麦 13经10年10个世代系谱法选育而成的高产多抗小麦新品种。

The solutions of Eq. (20) are

and


Substituting Eq. (21) into Eq. (23), it can be obtained that


3.2. Online time-to-go estimation
According to Definition 2, it is evidently known that the assumed interception is implemented at the Nj,mth time point,and thereby there are Nj,m-m intervals from the initial estimation of the future missile-target separation at the (m+1) th time point to the predicted intercept time point Nj,m.According to that, the time-to-go estimate with the jth modeling method at the kth time point can be written as

where Tsis the guidance sampling interval.
Here the similar fusion principle is adopted to receive the fusion time-to-go estimate. By using the time-to-go estimation components acquired from Eq. (25), the combined time-to-go estimate at the kth time point is given by

Remark 7. It is important to note that the varied guidance sampling interval will be used in reality, i.e., the reasonably large guidance sampling interval is utilized at the initial phase and the much smaller one at the terminal interception. The computational load of missile computer can be reduced apparently and the estimation precision of the two parameters almost can be maintained.
The Fisher fusion algorithm has been developed in this section to estimate the zero-effort-miss and time-to-go based upon the measurements of the missile-target separation. To further state the proposed methodology, a flowchart is provided and shown in Fig. 2.
As shown in Fig.2,it is supposed that the accurate missiletarget separations from the beginning of flight to the current time point can be received and the corresponding difference sequence can be naturally attained. Afterwards, utilizing the increased difference sequence,online dynamic models are constructed by the effective modeling methods like the autoregressive system identification and linear regression analysis.Namely,these models are driven by the dynamical separations.Then, the estimates with zero-effort-miss and time-to-go for each modeling method at the current time point can be yielded by these updated models. Finally, the Fisher fusion concept is adopted to obtain more precise ones. Moreover,it is observed that the estimation precision will be monotonically enhanced with the increasing separations. Additionally, the proposed algorithm is shown to be fully independent of missile-target kinematics equations, and without any assumption of missile guidance system dynamics, such as autopilot-airframe and dynamic characteristics of seeker and noise filter. Furthermore, the behavior of missile and target including the missile velocity and target maneuver are not considered in the process.
4. Simulation and results
In this section, some simulation results are given to illustrate the significance of the theoretical results obtained in Section 3.The first involves three situations,i.e.,stationary target,weaving target,and weaving target with disturbance.Next,to clearly exhibit the effectiveness of the proposed algorithm, the corresponding estimation curves of zero-effort-miss and time-to-go are provided and compared with method Brett and method 2,respectively. Note that, for zero-effort-miss estimation, the method Brett3(i.e., the subtraction of line-of-sight vector and its component projected on relative velocity direction) as one of widely used zero-effort-miss computation algorithms is adopted to compare with the Fisher fusion algorithm. Meanwhile,the method 2(i.e.,the missile-target range over the mean velocity projected on the line of sight)in Ref.18is used to contrast with this presented approach in time-to-go estimation.On the other hand, the real values with both the parameters are acquired by numerical integration of the dynamic models with the target and missile. Moreover, we list Root Mean Square Error (RMSE) values of these parameters in Table 1 to show the performance of the proposed scheme from another aspect.Except for that, to validate the analysis results of Remarks 2 and 5, i.e., the starting time value has an effect on the estimation accuracy with the two parameters,we assume that the total flight time has been known and denoted as tf,and two starting time values tf/2 and tf/3 are adopted.Based upon that,we compare the simulation results with both the starting time values in weaving target situation,and the starting time value tf/2 is used in rest cases.Last but not least,the identical homing guidance geometry model18is used in these numerical examples,and the desired impact angle is fixed as-30°.
4.1. Stationary target

Table 1 Comparison of the RMSE values with Zero-Effort-Miss (ZEM) and time-to-go (tgo) for different algorithms.
In this subsection, stationary target is treated. Here the twodimensional guidance geometry model shown in Fig.1 is used,and we assume that missile moves with constant-velocity. On the other hand, these significant curves, e.g., the estimation of zero-effort-miss and time-to-go as well as time-to-go computational efficiency, etc., are used to investigate the properties of the proposed algorithm.
Here(xM0,zM0)and(xT0,zT0)represent the initial position of the missile and target, respectively, and are equal to (0 m,3048 m) and (12160 m, 3048 m), respectively. VMand θM(0)are equal to 914.4000 m/s and 90°, respectively. Since the target is stationary here,the target parameters involved in Eq.(1)satisfy nT=0, VT(0)=0, and β(0)=0. Additionally, the guidance sampling interval is chosen as 0.0010 s.
The optimal guidance law with the terminal impact angle constraint18is adopted in this situation and can be written as

For implementation of the zero-effort-miss comparison,the computation formula of method Brett is provided, and the zero-effort-miss vectoris stated as

where ρ t( )=Vr/|Vr| ||denotes the unit vector of missile-target relative velocity Vr, and the Vrsatisfies Vr=VT-VM.
Similarly, time-to-go estimation formula with respect to method 2 is given by

It is known that the huge estimation errors with both the parameters might have severely affected the effectiveness of missile.Concretely,the larger zero-effort-miss estimation error will cause unreliable prediction of miss distance. Terribly, the guidance result might be seriously challenged if the imprecise miss distance is utilized by some guidance laws. Meanwhile,the inaccurate time-to-go estimates might heavily affect some guidance performance figures like miss distance and capture region, and cause the missile trajectory to deviate from the optimal one. For this problem, the proposed algorithm might be a hopeful way to decrease the mentioned estimation errors.To fully exhibit the virtues of this algorithm, some simulation curves appear here.
In order to reflect the better performance of the presented scheme in zero-effort-miss estimation, the comparison curves between method Brett and this scheme are provided and shown in Fig. 3(a). Identically, these profiles with time-to-go estimation between method 2 and the Fisher fusion algorithm are shown in Fig. 3(b). To further demonstrate the validity of these time-to-go estimates with the proposed algorithm, its corresponding curves of missile flight trajectory and flight path angle are compared with those of method 2,and these profiles are presented in Fig. 4, respectively. Notably, significant emphasis should be given to computational efficiency of the proposed algorithm,and this performance indicator is demonstrated through the time-to-go estimation.Here,the computational efficiency curves with Fisher fusion algorithm and method 2 are contrasted and shown in Fig. 5.

Fig. 3 Comparison of zero-effort-miss and time-to-go estimation.
Remark 8. The curves of this paper and the values of Table 1 are achieved at the MATLAB 2016b, computer master frequency is 3.40 GHz, and processor is Intel (R) Core (TM)i7-6700.
As shown in Fig.3(a),the estimation curve of method Brett initially appears far from the real value, and then gradually closes to the standard line as time increases. Yet we observe from the local enlarged figure that this curve cannot well converge to the correct one especially at the terminal phase. In contrast, the corresponding profile with Fisher fusion algorithm quite approaches to the standard line all the time. It means that the proposed strategy can ensure much better performance in zero-effort-miss estimation compared with method Brett. Evidently, these less accurate estimates are acquired by the method Brett, the cause of this phenomenon primarily lies in that its assumptions, i.e., both the missile and target experience equal acceleration and the target trajectory is linear relative to the missile, cannot be well satisfied in this situation. Since the target is essentially stationary, its acceleration is totally impossible to be equal to the one of missile, and the relatively linear target trajectory is also unable to fulfill. Hence, the method Brett obtains the lower estimation accuracy.
Fig. 3(b) presents the time-to-go comparison profiles between the presented algorithm and method 2. Obviously,the curve of method 2 almost coincides with the standard line in the process. Meanwhile, although small deviation happens initially,the profile with respect to the Fisher fusion algorithm can also perfectly converge to the real one and reasonably decrease with the increased time, even basically identical to the correct one at the final engagement. Notably, the great convergence with this scheme especially appears in the local enlarged figure.This implies that the valid time-to-go estimates can be completely acquired by this presented algorithm.Moreover, to further confirm this conclusion, these profiles of missile flight trajectory and flight path angle are provided in this study and shown in Fig. 4, respectively. We observe that both these curves with respect to the Fisher fusion algorithm can fully match those of method 2, indicating that the target can be successfully intercepted and the flight path angle can be accurately satisfied utilizing the time-to-go estimates with the proposed methodology.Accordingly,it ensures that the Fisher fusion algorithm is also capable of providing the effective timeto-go estimates.

Fig. 4 Comparison of missile flight trajectory and path angle.

Fig. 5 Comparison of computational efficiency of time-to-go.
Fig. 5 shows the computational efficiency curves with the presented algorithm and method 2.We see that these time values with method 2 extremely approach to zero in the whole engagement since the analytical calculation technique is employed. Furthermore, the proposed strategy also demonstrates the satisfactory computational efficiency. Specifically,this curve can swiftly decrease and maintain the downward tendency over time, and the final consuming time reaches to about 0.0100 s, although the huge running time is initially required to construct the first estimation models using a large number of missile-target ranges through the aforementioned modeling methods. This implies that the proposed methodology acquires the feasible and practical computational efficiency. In particular, it is worth noting that both the zeroeffort-miss and time-to-go yield the identical computational efficiency for the proposed algorithm since the two parameters are simultaneously estimated by this scheme based on the theory analysis shown in Section 3. Therefore, the time-to-go computational efficiency with the proposed algorithm can fully represent that of zero-effort-miss.Meanwhile,the two comparison techniques with both the parameters, i.e., method Brett and method 2, are analytical approaches shown in Eqs. (28)and (29), and thus the basically identical computational efficiency is also achieved by them. Accordingly, these time-togo comparison profiles can powerfully investigate this property of zero-effort-miss, and we will not reiterate these zero-effortmiss comparison curves again in this paper.
Following the discussion mentioned above,the validity and applicability of the Fisher fusion algorithm in estimation of both the parameters are sufficiently manifested in this situation.
4.2. Weaving target
In this subsection, the weaving target is taken into account.The velocities of the missile and target are assumed time invariant here.The target velocity VTand initial flight path angle β0are respectively equal to 304.8000 m/s and zero,and the target acceleration nT=58.3078 sin 3t( ) m/s2. The other simulation parameters used in Section 4.1 are also employed here. Notably, the preceding method Brett shown in Eq. (28) is still utilized to compare with the proposed algorithm in zero-effortmiss estimation. Except for that, the modified time-to-go formula is used here, i.e., in view of Eq. (29), the missile velocity VMis replaced by the closing velocity Vcand Vc=VT-VMis satisfied.Since the target maneuvers,the optimal guidance law studied in Ref.24is adopted and shown as

To validate statements of Remarks 2 and 5, the initial model of Fisher fusion algorithm is separately constructed at both the starting time values (i.e., tf/2 and tf/3). Further, all these involved curves are drawn in both of them. Their zeroeffort-miss estimation curves and time-to-go estimation profiles are separately shown in Figs.6 and 7.Similarly,to exhibit the time-to-go estimation effectiveness, the curves of missile flight trajectory and flight path angle are compared between the proposed algorithm and method 2 and these curves are shown in Fig.8.Except for that,the time-to-go computational efficiency profiles with the presented algorithm and method 2 are displayed in Fig. 9.

Fig. 6 Comparison of zero-effort-miss estimation with tf/2 and tf/3.
Fig.6 shows the zero-effort-miss estimation curves for both the starting time values. We see that the changes of these curves for tf/2 are extremely similar to those of tf/3. Exactly,these profiles of method Brett gradually decline as the similar curve with target acceleration even at the terminal phase.Instead,the relevant ones with respect to the proposed scheme still sufficiently approximate to the standard line during the process. Moreover, this phenomenon apparently exhibits in their local enlarged figures. Consequently, the more reliable zero-effort-miss estimates can be processed by the proposed methodology in both cases. Notably, the assumptions of method Brett cannot also be well guaranteed in this situation.Similar to Section 4.1,the missile acceleration cannot ensure to be equal to that of target though the target maneuvers. Associated with their trajectories, the sinusoidal motion is clearly held by the target all the time, yet the missile achieves the straight trajectory particularly at the terminal phase. Thus the method Brett acquires these less precise zero-effort-miss estimates.
On the other hand, Fig. 7 shows the time-to-go estimation curves with the Fisher fusion algorithm and method 2 for these cases. Evidently, the variations of these curves are similar to the standard line on the whole. Especially, the corresponding ones with method 2 are basically identical to the real one,i.e., the great accuracy is acquired by this technique. Furthermore, these curves with the proposed scheme can also swiftly approximate to the true value with increasing time,and remain almost equal to the correct one at the final stage.This suggests that the satisfactory time-to-go estimates can also be completely achieved by this methodology. Besides, we note that much more rapid reaching speed is explicitly shown in case of tf/2 compared to that of tf/3 particularly for the initial phase, implying that the estimation of both the parameters can be easily affected by different starting time values.To fully verify this conclusion, the profiles of missile trajectory and flight path angle are provided and shown in Fig. 8. Fig. 8(a)reveals that the missile trajectory with tf/3 is distinctly far from that of method 2 especially in the beginning stage,yet this trajectory can gradually approach to the compared one over time.On the contrary, the corresponding curve with tf/2 might be completely in agreement with that of method 2 in the whole engagement. Meanwhile, we notice that the similar phenomenon is clearly displayed by the profiles of flight path angle in Fig.8(b).Hence,the statements of Remarks 2 and 5 are sufficiently confirmed.

Fig. 7 Comparison of time-to-go estimation with tf/2 and tf/3.
Fig.9 shows the comparison curves of time-to-go computational efficiency between the proposed algorithm and method 2 under both the starting time values. Clearly, these curves with both cases are extremely similar to those of stationary target.Except for that, the initial computation time value with tf/2 is larger than that of tf/3, because the more separations are used in the construction of initial model and the longer running time is naturally required. Notably, the two curves are greatly close to that of method 2 as time increases and the terminal running time can also reach to about 0.0100 s. This implies that the precise time-to-go estimates can be yielded by the proposed algorithm in an efficient way. Additionally,since the zero-effort-miss computational efficiency can also be fully demonstrated by these time-to-go comparison curves based on the identical reasons shown in Section 4.1, the satisfactory zero-effort-miss computational efficiency can also be acquired by this algorithm.

Fig. 8 Comparison of missile flight trajectory and path angle with tf/2 and tf/3.
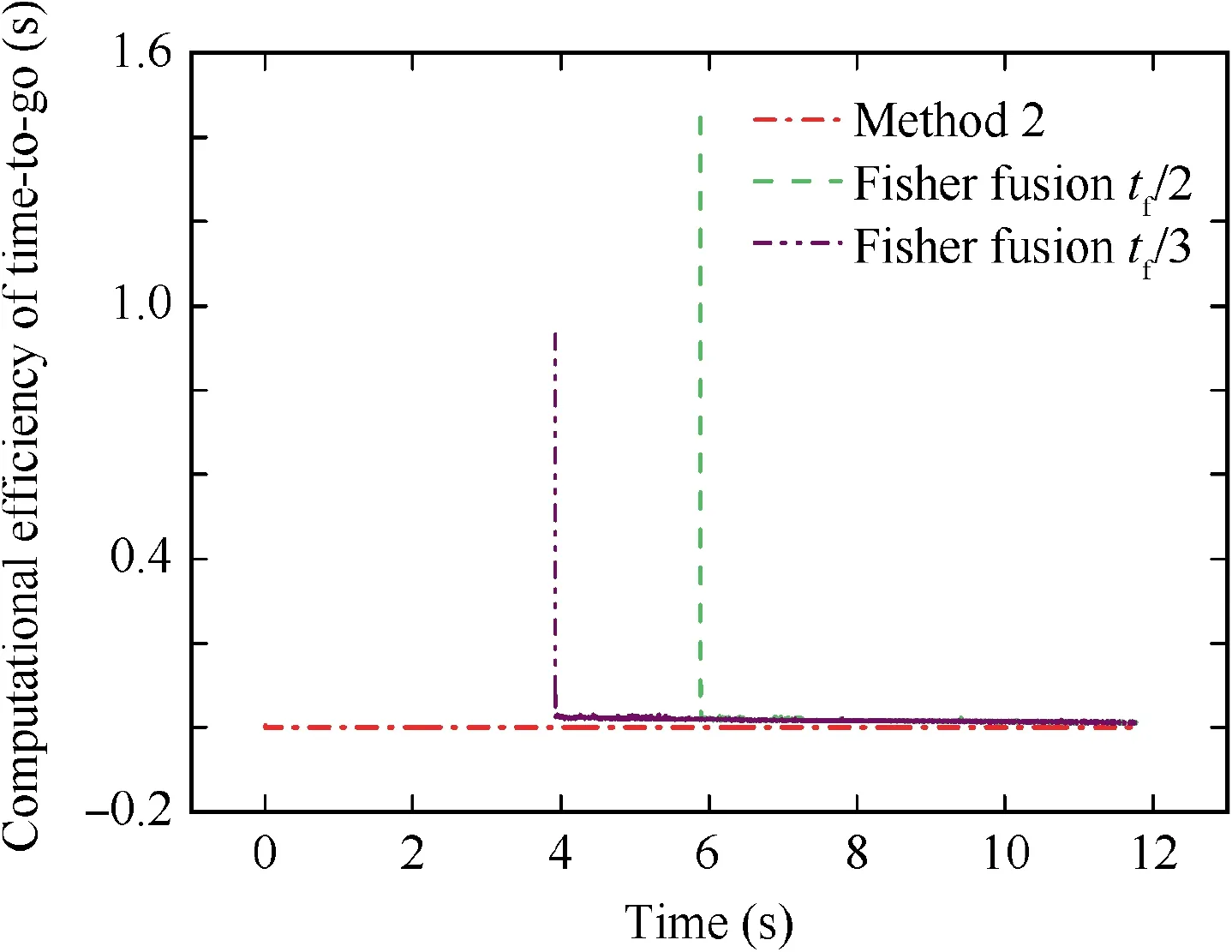
Fig. 9 Comparison of computational efficiency of time-to-go with tf/2 and tf/3.
Based upon the above detailed analysis, it is explicitly demonstrated that the practicability and computational efficiency can be well guaranteed by the presented algorithm in estimation of both the parameters under the maneuver target circumstances.
4.3. Weaving target with disturbance
In this subsection, the performance of the proposed scheme is considered in the presence of disturbance or uncertainty. The missile-target engagement geometry shown in Fig. 1 is still adopted here. The identical comparison methods with both the parameters, i.e., method Brett and modified method 2, are also utilized. Similarly, the guidance law shown in Eq. (30) is used in this situation. Additionally, the simulation conditions are identical to Section 4.2 except that the two external disturbance items are D1=-1.65 cos β and D2=0.55 sin β. Finally,the aforementioned curves are presented in Figs. 10-12.

Fig. 10 Comparison of zero-effort-miss and time-to-go estimation.
Fig. 10(a) shows that the zero-effort-miss estimation curve with Fisher fusion algorithm is much more approximate to the real one compared with method Brett in the whole process,indicating that the more accurate zero-effort-miss estimates can be achieved by the presented scheme even in the presence of uncertainty.In addition,Fig.10(b)compares the time-to-go estimates between this scheme and method 2. Obviously, both curves can quickly track the standard line over time, and the better time-to-go estimation can be provided by the proposed algorithm at the terminal phase. Similarly, the missile flight trajectory and flight path angle are supplied to confirm the validation of time-to-go estimates with the presented algorithm,and these curves are shown in Fig. 11. We notice from these figures that the changes of both curves for the Fisher fusion algorithm are extremely similar to those of method 2. This not only exhibits the effectiveness of the proposed algorithm in time-to-go estimation, but also demonstrates the strong robustness with respect to the external disturbance. Fig. 12 shows the computational efficiency curves with Fisher fusion algorithm and method 2 in this situation. It can be seen that the basically identical variations are performed by these curves compared with the weaving target situation, and the consuming time at the terminal phase is also about 0.0100 s. This means that the proposed strategy can obtain satisfactory computational efficiency in estimation of both the zero-effort-miss and time-to-go.These curves mentioned above,apparently display the great precision and desired efficiency with the proposed algorithm in estimation of both the parameters.Moreover, the great robustness with the external disturbances is also fully validated.

Fig. 11 Comparison of missile flight trajectory and path angle.

Fig. 12 Comparison of computational efficiency of time-to-go.
4.4. RMSE of zero-effort-miss and time-to-go
In this subsection, we provide Table 1 and list the RMSE values of zero-effort-miss and time-to-go for different algorithms to further analyze the performance of the Fisher fusion algorithm.
Table 1 reveals that the satisfactory performance can be generally received by the presented methodology in estimation of both the parameters. Exactly, for the zero-effort-miss, the RMSE values with this algorithm are much smaller than those of method Brett in these three situations.It must be noted that the similar conclusion, i.e., the more precise zero-effort-miss estimates can be yielded by the proposed scheme, is perfectly validated from this aspect. Meanwhile, we observe that the smallest RMSE values for the Fisher fusion algorithm is shown in the stationary target, and the slightly larger ones belong to the weaving target as well as the much bigger values for the weaving target with disturbance. This happens due to the fact that the more accurate missile-target separations can be easily acquired when the target keeps stationary, and the better estimates can be naturally obtained. Besides, we compare both cases of the weaving target,and notice that the more precise zero-effort-miss estimates are achieved in the case of tf/2. Furthermore, these phenomenons fully coincide with the aforementioned zero-effort-miss simulation curves.
With the time-to-go RMSE values, it is clearly shown that both the estimation techniques experience the similar variation in these situations,and even the appeared tendency is basically identical to that of zero-effort-miss. Notably, these changes completely agree with the time-to-go simulation curves.Moreover,we see that these values of the Fisher fusion algorithm for both the parameters are equal to each other. Since, in view of the theory analysis shown in Section 3, the time-to-go estimation is based on the zero-effort-miss estimation and its corresponding precision is also directly determined by that of zero-effort-miss, the identical RMSE values for this presented algorithm are obtained by the two parameters.Except for that,this phenomenon, i.e., the slightly larger time-to-go RMSE values are obtained by the proposed algorithm compared with method 2,is evidently demonstrated in this table.After careful consideration, we find out that this happens mainly because the method 2 relies primarily on the accurate motion models of the missile and target,and these models are exactly provided by our simulation examples (i.e., Eq. (1) and target acceleration),and thus the more precise ones can be naturally achieved by the method 2.In contrast,the presented algorithm only utilizes these missile-target separations to achieve the time-to-go estimates,yet the satisfactory estimation accuracy can be completely attained by this technique.Consequently,the proposed scheme is more suitable to cope with the estimation problem,and can be widely applied for practical use.
To briefly conclude, detailed analysis of the online estimation of the two parameters shows significant enhancement in the online estimation accuracy, while the computational efficiency is well guaranteed and the strong robustness with the external disturbances is achieved. We investigate the reasons which primarily rely on these factors.At the outset,the motion equations of the homing guidance geometry are the vital dependence and theoretical support of the conventional estimation algorithms. However, these equations are completely negligible by the presented algorithm. To be replaced, the missile-target separations are directly utilized to achieve the desired zero-effort-miss and time-to-go estimates. It is evidently indicated that the missile-target separation as the only parameter involves in the engagement. Naturally, the properties of simplicity and applicability can be acquired by this algorithm. Meanwhile, due to the fact that the mentioned equations are not established, the various assumptions are not necessary, and the Fisher fusion algorithm is used to obtain the estimates of both the parameters, thus satisfactory computational efficiency and high estimation precision can also be achieved by it. Besides, the robust performance with the external disturbances of this algorithm is clearly verified.Therefore, the proposed strategy obtains crucial engineering significance and application value.
5. Conclusions
This paper presents a new online estimation algorithm for zero-effort-miss and time-to-go with high accuracy and efficient computation mechanism. The difficulties associated with the two parameters are firstly studied by the previously reported estimation algorithm. Next, to achieve more precise estimates, the measured missile-target separations are employed to provide the required estimation components,and the Fisher fusion algorithm is adopted to yield the more accurate ones. Based on the theoretical analysis and massive simulation results, these advantages are possessed by the presented algorithm,where the two parameters can be timely estimated at one time, only the missile-target separations are required, and the satisfactory performance (e.g., significant applicability, extensive simplicity, strong robustness with respect to external disturbances, etc.) is provided. Furthermore, these aforementioned merits have been demonstrated by the simulations. In addition, the presented algorithm can be applied to various missile-target engagement models to achieve the qualified zero-effort-miss and the time-to-go estimates. Finally, it must be noted that the above simulation results could be more or less affected by the selection of the several involved parameters (e.g., initial conditions, target maneuverability, external disturbances, etc.), and specifically,the results will be the worst or even better when these parameters vary the large set of conditions.
Acknowledgement
This work was supported by the National Natural Science Foundation of China (No. 71571190).
猜你喜欢
杂志排行
CHINESE JOURNAL OF AERONAUTICS的其它文章
- Design and analysis of a hypersonic inlet with an integrated bump/forebody
- Experimental study of effect of post processing on fracture toughness and fatigue crack growth performance of selective laser melting Ti-6Al-4V
- Experimental and numerical investigation of threedimensional vortex structures of a pitching airfoil at a transitional Reynolds number
- A methodology for simulating 2D shock-induced dynamic stall at flight test-based fluctuating freestream
- Robust adaptive compensation control for unmanned autonomous helicopter with input saturation and actuator faults
- Flight strategy optimization for high-altitude long-endurance solar-powered aircraft based on Gauss pseudo-spectral method