基于动态稳定性的高铁快递搬运车参数设计
2019-12-18陈龙张玉召李曦琳
陈龙,张玉召,李曦琳
基于动态稳定性的高铁快递搬运车参数设计
陈龙1,张玉召2,李曦琳2
(1. 北京交通大学 交通运输学院,北京 100044;2. 兰州交通大学 交通运输学院,甘肃 兰州 730070)
针对我国目前高铁快递在站内的人工搬运作业效率较低的问题,结合高铁站内的通道特点提出采用动态稳定性算法对高铁快递搬运车的初速度可行范围进行逐步确定。首先根据质心位置的变化规律确定搬运车底部履带齿轮的半径大小,对快递搬运车在攀爬台阶过程中的单点、双点接触进行相应的受力分析,建立动态稳定性模型并利用MATLAB软件进行仿真。计算结果验证理论分析的正确性,为高铁快递搬运车的参数设计提供理论依据。
高铁快递;快递搬运车;齿轮半径;受力分析;运动学仿真

目前,我国快递业发展迅猛,高铁快递因其独有的优势成为广大物流公司的选择对象。国内学者对高铁快递从货源组织到开行方案等诸多方面进行了深入研究[1−5],然而目前的高铁快递在站内的装卸搬运工作却仍然停留在人工搬运阶段,成为整个高铁快递作业过程中的制约环节。本文正是在此背景下提出设计履带式搬运车的构想,并对其齿轮半径和运行速度进行确定。快递搬运车在通过站内地道或天桥的过程中会与台阶踏面相互接触产生作用力,履带齿轮的不同转速和不同的运行状态会带来不同的作用力。因此需要对整个过程中的稳定性进行分析。早期学者对履带机器人攀爬台阶的先决条件和静态稳定性已有了成熟的研究[6−8],并对其相关参数进行确定。目前国内外学者着眼于对履带机器人在攀爬楼梯过程中动态稳定性进行分析<[9−11],同时对越障能力进行了优化[12−13]。但目前为止的研究多是单方面的针对关节式履带或腿型机器人逾越障碍物[14−15]进行的,未能在动态稳定性的基础上对尺寸参数和运行速度进行设计。当高铁车站进行快递货物搬运的过程中对不同的货物有着不同的运到时限的要求,所以搬运装置在攀爬楼梯过程中的运行速度决定了场站工人开始的配送时刻以及车站内需要的配置数量。本文正是考虑以上情况,基于既有相关研究的基础之上对传统的快递搬运车在改进过程中确定底部履带的齿轮半径和运行速度。
1 问题分析
快递搬运车与传统手推平板车的不同之处在于其底部需要加装履带,本文所设计的自动搬运车的载物部分为活动型载物板,可以保持快递货物始终与水平面相平行,从而满足货物运输的稳定性要求。整体结构简图如图1所示。

图1 履带搬运车结构简图
因此对履带搬运车稳定性研究主要集中在底部履带在攀爬阶梯过程的稳定性上。
1.1 齿轮半径的攀爬能力分析
底部履带齿轮的半径设计将会影响到能否顺利的攀爬台阶。因此,首先对履带部分齿轮半径尺寸进行研究。
建立如图2所示的直角坐标系,该坐标系以后齿轮轴心1为坐标原点,12所在直线为轴的正方向,与之垂直的上方向为轴的正方向。设齿轮半径为(不计履带边缘的厚度);前后齿轮轴心长度为;仰角为(0°<<90°);台阶高度为;搬运车的质点坐标为(,)。

图2 履带式行走机构攀爬台阶式运动图
以台阶外角线作为临界线对快递搬运车的质心位置进行分析,当在竖直方向的投影位置能够越过台阶踏面边缘所在的临界线则认为可以越过台阶,反之不能。此处以搬运车质心位置所在的竖直线刚好能够与台阶的外角线对齐作为临界状态进行研究分析,建立以齿轮半径为因变量的 函数:

1.2 履带攀爬过程中不滑移条件分析
履带部攀爬过程的受力分析立体图如图3 所示。

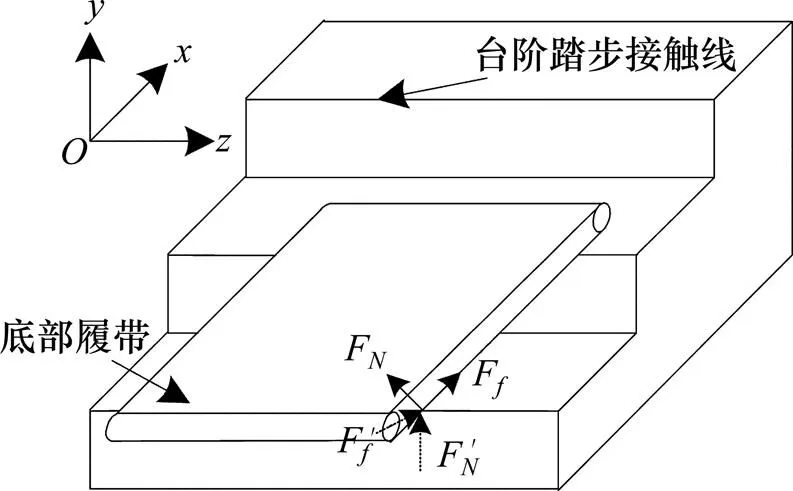
图3 履带爬楼梯受力分析立体图

图4 履带爬楼梯受力分析图




2 模型构建
2.1 单点接触稳定性模型
履带与楼梯台阶单点接触发生在刚攀登楼梯的过程,它的接触受力以及动作变化过程如图5所示。以履带的后驱动轮所在圆心为坐标原点,水平方向为轴;竖直方向为轴。履带部分的质量为;前后轮轮心间距离为;台阶高度为;履带与水平方向的夹角为仰角;移动速度为();水平方向移动距离为();驱动轮与从动轮的角速度分别为1,ω2;齿轮的半径为;质心坐标为(0,0);前后轮圆心坐标分别为2和1。
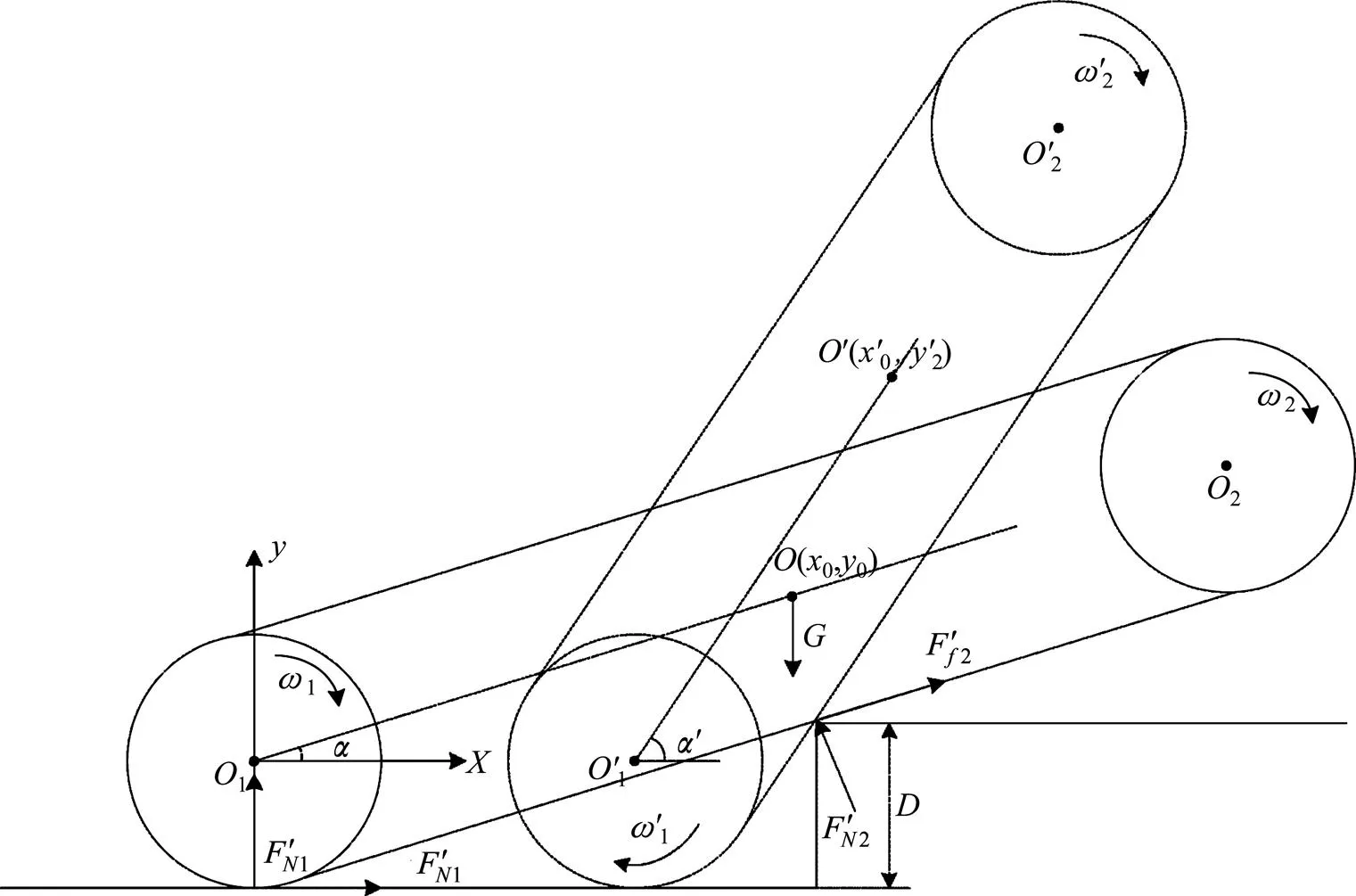
图5 单点接触受力分析图
根据图5中所建立的坐标图几何关系,质点坐标(0,0)对时间进行二阶求导,可得:

根据牛顿第二定律,0,0方向所受到运动状态时的惯性力分别是:





综上所述,搬运车与台阶单点接触时的稳定性准则可以归纳为:

2.2 双点接触稳定性模型
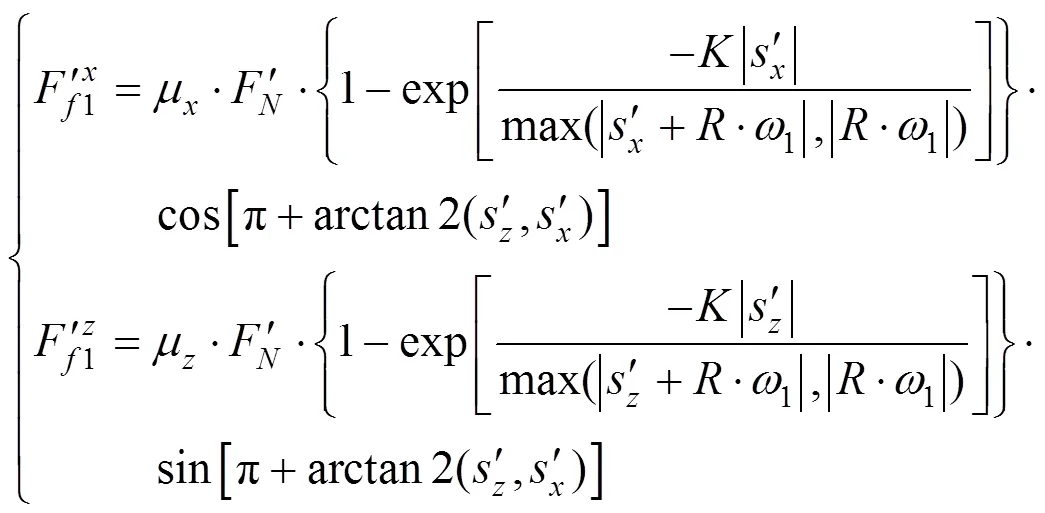
当底部履带在单点接触且质心越过第一个台阶之后开始接触第二个台阶踏面,由此进入双点接触状态,受力分析如图6所示。
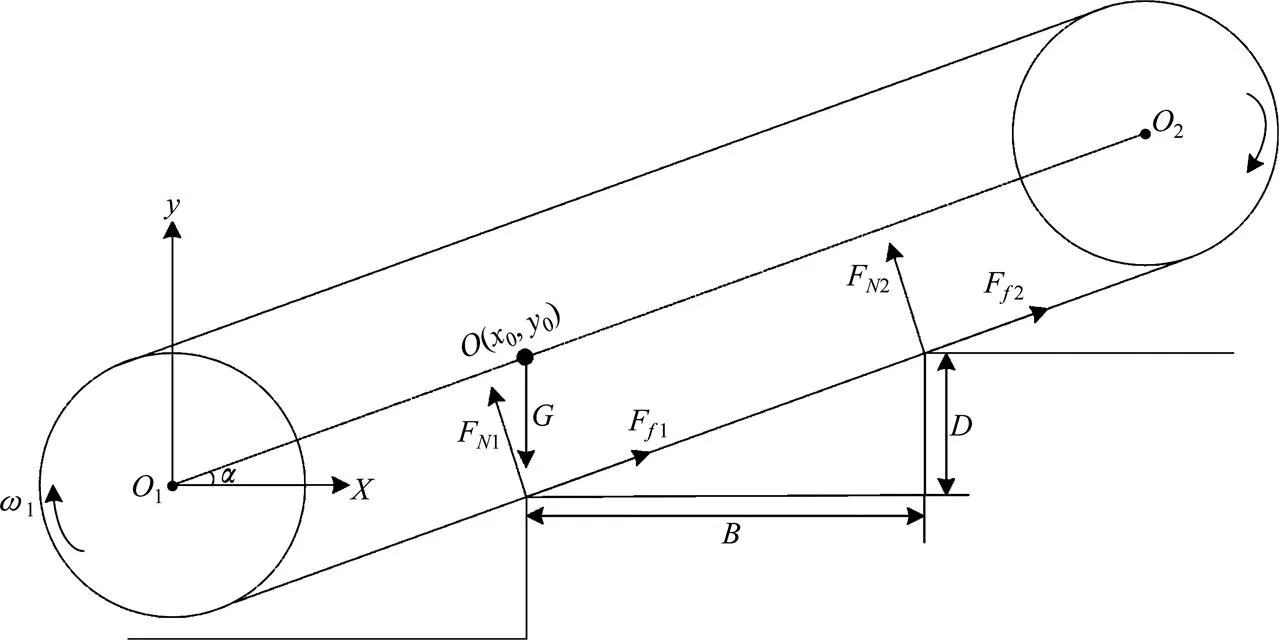
图6 双点接触受力分析图

根据力和力矩的平衡方程:

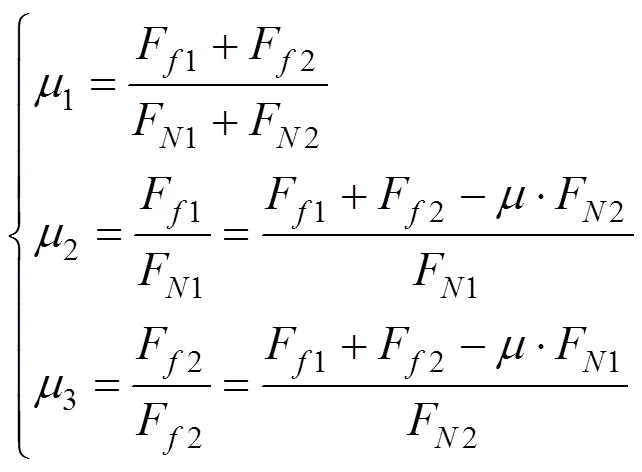
根据式(14)整理出F2,F1和F1+F2的表达式:

式中:F1和F2分别表示台阶对搬运车的等效牵引力;F2和F1分别表示台阶对搬运车的等效支 持力。
根据如图6,当2个履带直接接触在台阶踏面上以及一个直接接触台阶踏面和两个都不接触的情况,满足不产生滑移的充分必要条件分别为:
类比式(12),搬运车与台阶双点接触时的稳定性准则可以归纳为:

式中:=1,2,3。
综上所述,快递搬运车在攀爬楼梯的过程中需要始终满足单点和双点接触的稳定性准则要求才能够平稳运行。当双点接触的稳定性准则满足时,3点及其以后的多点接触情况必然满足其稳定性,此处不再证明。
3 仿真分析
3.1 齿轮半径的确定
是台阶高度,此处取定值150 mm,根据图2,由于质心位置(,)与货物载重量和放置位置有关,货物质量越大,放置位置越集中。也就越接近/2,同理也就越远离。为了解,和对履带齿轮半径的最大值影响,本文结合目前实际手推平板车的设计尺寸,将和按照表1进行取值。并于表中将极值点进行汇总。

表1 质心位置对应的最大齿轮半径和仰角
将表1中初始数据代入式(1)中并利用MATLAB软件进行仿真,齿轮半径随仰角变化的仿真结果如图7所示。

图7 齿轮半径与履带仰角之间的关系曲线图
根据图7中的运算结果可知,每条曲线的极值点表示能够满足仰角能够克服的所有仰角的最小齿轮半径。结合实际情况,此处以能够符合表1要求的最小齿轮半径31.245 6 mm(取近似值30 mm)作为满足攀爬条件的快递搬运车的齿轮半径。
3.2 搬运车运行速度的确定
在考虑履带攀爬台阶的运行速度时,既需要满足单点接触的稳定性准则又需要满足双点接触的稳定性准则才能够保证运行过程中不发生滑移。参考高铁快递业务物流箱以及传统手推车的规格,快递搬运车的参数设置如表2所示。

表2 机械搬运车参数设置
与楼梯接触的动摩擦因数取0.5,max取2.0。在单点接触的情况下,计算结果如图8所示。

图8 单点接触时初速度与等效牵引力和等效支持力的坐标曲线图

图9 单点接触时初速度与等效牵引力/等效支持力的坐标曲线图

在双点接触情况下进行类似的处理,计算结果如图10所示。
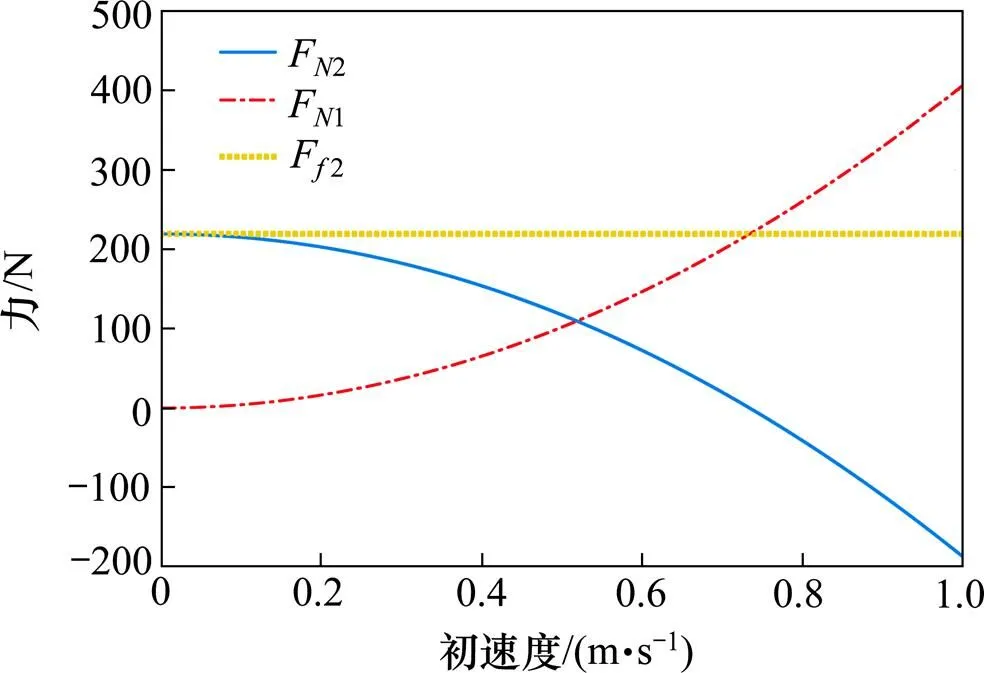
图10 双点接触时初速度与实际牵引力和实际支持力的坐标曲线图

图11 双点接触时初速度与等效牵引力/等效支持力的坐标曲线图

4 结论
1) 分析了履带攀爬台阶的影响因素,发现攀爬成功的关键在于履带的质心位置。然后在此基础上建立相应的物理模型,确定30 mm作为齿轮半径。
3) 从动态稳定性的角度对履带齿轮半径和运行速度进行仿真计算并给出了合理的运行速度范围。然而在实际的操作过程中搬运车由于自身运动惯性等原因难以始终保持匀速运动,对于稳定性干扰等问题应考虑更多的影响因素进行更加深入的研究,以完备其设计参数。
[1] 张玉召, 王建强. 铁路快捷货物货源组织优化模型及算法[J]. 计算机工程与应用, 2015, 51(4): 7−10, 40. ZHANG Yuzhao, WANG Jianqiang. Organizational optimization model and algorithm of railway express cargo supply[J]. Computer Engineering and Application, 2015, 51(4): 7−10, 40.
[2] YU X, LANG M, GAO Y, et al. An empirical study on the design of china high-speed rail express train operation plan—from a sustainable transport perspective[J]. Sustainability, 2018(10): 2478.
[3] 张庆轩. 高铁快递专列开行方案研究[D]. 北京: 北京交通大学, 2018.ZHANG Qingxuan. Study on the development plan of high-speed express train[D]. Beijing: Beijing Jiaotong University, 2018.
[4] 张玉召, 严余松. 快捷货物列车开行方案多目标优化模型及算法[J]. 交通运输系统工程与信息, 2014, 14(3): 111−116. ZHANG Yuzhao, YAN Yusong. Multi-objective optimization model and algorithm of express cargo train operation scheme[J]. Transportation System Engineering and Information, 2014, 14(3): 111−116.
[5] 李允旺, 葛世荣, 朱华, 等. 四履带双摆臂机器人越障机理及越障能力[J]. 机器人, 2010, 32(2): 157−165. LI Yunwang, GE Shirong, ZHU Hua, et al. Mechanism and capacity of four-track double-swinging arm robot[J]. Robot, 2010, 32(2): 157−165.
[6] 饶伟, 施家栋, 王建中. 关节式履带机器人爬楼梯动态稳定性分析[J]. 机械工程学报, 2014, 50(15): 60−67. RAO Wei, SHI Jiadong, WANG Jianzhong. Dynamic stability analysis of joint crawler crawling stairs[J]. Journal of Mechanical Engineering, 2014, 50(15): 60−67.
[7] ZHANG C D, SONG S M. Stability analysis of wave-crab gaits of a quadruped[J]. Journal of Robotic Systems, 1990, 7(2): 243−276.
[8] ZONG C, JIANG S, GUO W, et al. Static stability analysis of a joint double-tracked robot[C]// Control & Decision Conference. IEEE, 2014.
[9] 孙智勇. 变形履带机器人机构设计与仿真分析[D]. 绵阳: 西南科技大学, 2015. SUN Zhiyong. Design and simulation analysis of deformed tracked robot mechanism[D]. Mianyang: Southwest University of Science and Technology, 2015.
[10] Hatano M, Kitahara Y. Research on controls of sub crawlers for climbing up stairs with LRF for rescue robots[C]// International Conference on Control. IEEE, 2017.
[11] LI Nan, MA Shugen, LI Bin, et al. An online stair- climbing control method for a transformable tracked robot[C]// IEEE Int. Robotics and Automation, May 14−18, 2012, Minnesota, USA. Minnesota: IEEE, 2012: 923−929.
[12] 刘满禄, 王亚翔, 张俊俊, 等. 履带机器人越障能力优化[J].制造业自动化, 2018, 40(5): 24−27, 76. LIU Manlu, WANG Yaxiang, ZHANG Junjun, et al. Optimization of obstacle avoidance of crawler robots[J]. Manufacturing Automation, 2014, 40(5): 24−27, 76.
[13] 韩捷, 孙奇珍, 曾文凡. 履带机器人行走及越障能力分析研究[J]. 科技创新导报, 2018(14): 95−97, 99. HAN Jie, SUN Qizhen, ZENG Wenfan. Analysis and research on the walking and obstacle crossing ability of crawler robots[J]. Science and technology innovation guide, 2018(14): 95−97, 99.
[14] 田润, 宋轶民, 孙涛, 等. 一种新型轮腿式移动机器人的参数设计与实验研究[J]. 机器人, 2015, 37(5): 538− 545.TIAN Run, SONG Yimin, SUN Tao, et al. Parameter design and experimental research of a new wheeled legged mobile robot[J]. Robot, 2015, 37(5): 588−545.
[15] SANG L, WANG H, WANG S, et al. Gait and experiment research for the human-carrying quadruped walking chair robot with parallel leg mechanism[M]. Springer International Press, 2016.
[16] LIU Yugang, LIU Guangjun. Track–stair interaction analysis and online tipover prediction for a self-reconfigurable tracked mobile robot climbing stairs[J]. IEEE Trans. on Mechatronics, 2009, 14(5): 528− 538.
[17] LIU Y, LIU G. Kinematics and interaction analysis for tracked mobile manipulators[C]// IEEE/RSJ Int. Conf. Intell. Robot Syst, San Diego, CA, USA, 2007.
Parameter design of high-speed rail express truck based on dynamic stability
CHEN Long1, ZHANG Yuzhao2, LI Xilin2
(1. School of Traffic and Transportation, Beijing Jiaotong University, Beijing 100044, China; 2. School of Traffic and Transportation, Lanzhou Jiaotong University, Lanzhou 730070, China)
In view of the low processing efficiency of China’s high-speed rail express station, this paper combined the characteristic of the channel in the high-speed rail station to propose a dynamic stability algorithm to gradually determine the feasible range of the initial speed of the high-speed rail express truck. Firstly, according to the change rule of the position of the centroid, the radius of the track gear at the bottom of the truck was determined. Then according to the physics related knowledge, the corresponding force analysis of the single-point and double-point contact of the crawler truck during the climbing step was carried out. Finally, a dynamic stability model was established and MATLAB software was used for simulation processing. The calculation results verify the correctness of the theoretical analysis and provide a theoretical basis for the performance design of the high-speed rail express delivery truck.
high-speed railway express; tracked truck; gear radius; force analysis; kinematics simulation
TP242.3
A
1672 − 7029(2019)11− 2668 − 08
10.19713/j.cnki.43−1423/u.2019.11.004
2019−03−02
国家自然科学基金资助项目(71761025)
张玉召(1981−),男,安徽砀山人,副教授,博士,从事铁路运输组织领域教学与研究;E−mail: yuzhaozhang@126.com
(编辑 蒋学东)
