高速磁浮列车长定子轨道几种故障情况的分析
2019-12-18罗茹丹吴峻王智仁
罗茹丹,吴峻,王智仁
高速磁浮列车长定子轨道几种故障情况的分析
罗茹丹,吴峻,王智仁
(国防科技大学 智能科学学院,湖南 长沙 410073)
与轮轨交通不同,高速磁浮列车轨道是一种同步直线电机的长定子,其因长距离露天铺设,有可能会出现定子电缆下挂、定子电缆绝缘层破损、铁芯环氧层老化破裂以及定子段间大错牙等故障情况,这些故障将直接影响列车的安全高效运行。为了实现上述故障的快速检测,以磁场为研究对象,对高速磁浮长定子电机及其轨道进行建模,仿真分析上述故障情况下的行波磁场,探讨主漏磁场与故障之间的规律,其中电缆下挂和铁芯环氧层老化破裂故障对应行波磁场的减弱,极端情况下减弱程度为25%;绕组绝缘层破损造成三相短路故障对应行波磁场强度增大近5倍,5和7次谐波也更加明显;轨道不同方向错牙故障对应行波磁场幅值的不同大小变化,当上下偏移3 mm时,变化程度约为10%,这些规律为后续的轨道故障检测工作提供理论依据。
高速磁浮列车;轨道故障检测;行波主漏磁场;电磁场分析

高速磁浮列车是一种通过电磁悬浮方式沿轨道实现“零高度高速飞行”的交通工具,目前已有成熟的商业运营线,其中,包括悬浮导向系统在内的磁浮车辆技术已经成熟。但是,随着进一步推广和应用,高速磁浮线路轨道研究的重要性逐渐凸显。与其他轨道交通相比,高速磁浮的线路轨道具有独特性,它实际上是一种同步直线电机的长定子,在车辆的悬浮导向及其牵引系统中承担着重要作用,它的状态好坏直接影响车辆运行的稳定性、安全性以及舒适性。其中,长定子轨道的不平顺、铁芯表面的环氧层破裂、铁芯片间短路故障以及牵引电缆破损或下挂直接关系到悬浮、牵引系统有效运行,在高速磁浮交通日常维护管理中需重点关注。目前对磁浮轨道的检测和维护与轮轨列车轨道类似,由于轨道几何参数是轨道检测维护的基础,大都比较关注轨道本身的线路几何参数的检测[1−3],但高速磁浮轨道是同步直线电机的长定子,由铁芯和镶嵌其中的三相绕组构成,用于产生与悬浮电磁铁作用而牵引磁浮列车平稳快速前进的行波磁场,所以高速磁浮轨道比普通轮轨轨道增加了电磁特性,只检测轨道的几何尺寸参数是不全面的,对高速磁浮轨道的故障检测实际上应该是一种直线同步电机定子故障的检测。直线同步电机定子故障大致分为叠片故障和定子绕组故障[4]。其中对定子绕组内部故障检测的研究较多,通常采用绕组函数法或等效磁路法建立直线同步电机模型进行参数辨识而对故障进行诊断[5−7],该方法对故障模型的要求较高。定子的叠片故障和绕组的老化故障一般表现为缺陷和绝缘层故障,通常采用环路磁通法、红外热成像法等进行检测[8],该方法只适用于离线的静态检测。除此之外,与旋转电机类似,直线同步电机的故障检测还可以是基于信号检测的故障诊断[9−10],该方法对电机初期故障的检测比较有效,对维护电机免发生更大的事故有重要的意义。高速磁浮长定子轨道不同于常规直线电机定子,其绕组为单匝的高压电缆,镶嵌于定子铁芯中,除绕组的内部故障外,还可能发生定子电缆下挂的故障;另外长定子铁芯是360片0.5 mm厚的硅钢片叠压制成,铁芯的老化可能会引发硅钢片间短路故障;此外高速磁浮长定子轨道采用分段拼接式结构,会发生定子段之间的轨道大错牙等故障。这些故障,尤其是电气故障,会表现在由定子产生的行波磁场上,成为一种微弱磁信号,通过检测这种微弱的磁信号可以实现对定子故障的检测,近年来随着虚拟仪器和电子器件的不断发展,利用谐波小波等研究成果指导检测微弱信号成为一种比较简单的方法,且目前磁敏传感器的发展比较迅速,常见的霍尔传感器灵敏度可达8.3 mV/Gs,量程范围0~10,精度可达10−6。所以利用高灵敏度的磁敏传感器对故障造成的行波磁场微弱信号偏差进行检测成为一种检测轨道故障的可行方法,同时对行波磁场的检测可以做到实时和非接触,故基于行波磁场检测的高速磁浮轨道故障诊断不失为一种高效的故障诊断方法。由于磁浮列车悬浮气隙过小,气隙中磁场环境又较为复杂,为了安全起见,多点检测传感器均布置在悬浮磁铁之外,即利用检测电机行波主漏磁场实现对故障的检测。本文以行波主漏磁场为特征量进行分析,讨论上述几种故障情况下的行波主漏磁场情况,为后续基于行波磁场的长定子轨道的故障诊断提供理论依据,有助于弥补前文所述只研究轨道几何参数的不足,更深层次的对轨道的检测与维护进行研究。
1 行波主漏磁场计算分析
1.1 行波主漏磁场理论计算
如图1所示,定子绕组产生的磁场分为2类:列车覆盖区域的定子磁场参与能量转换,它与励磁磁极共同作用形成主磁场;而无列车覆盖区域的定子磁场则不参与能量转换,通过外部空气形成闭合回路,仅与定子绕组相交链成为主漏磁场。主磁场中磁场情况比较复杂,其中的悬浮磁场对行波磁场的干扰最大,而主漏磁场中干扰较少,便于对行波磁场的检测,仅以无列车覆盖区域的主漏磁场进行分析。
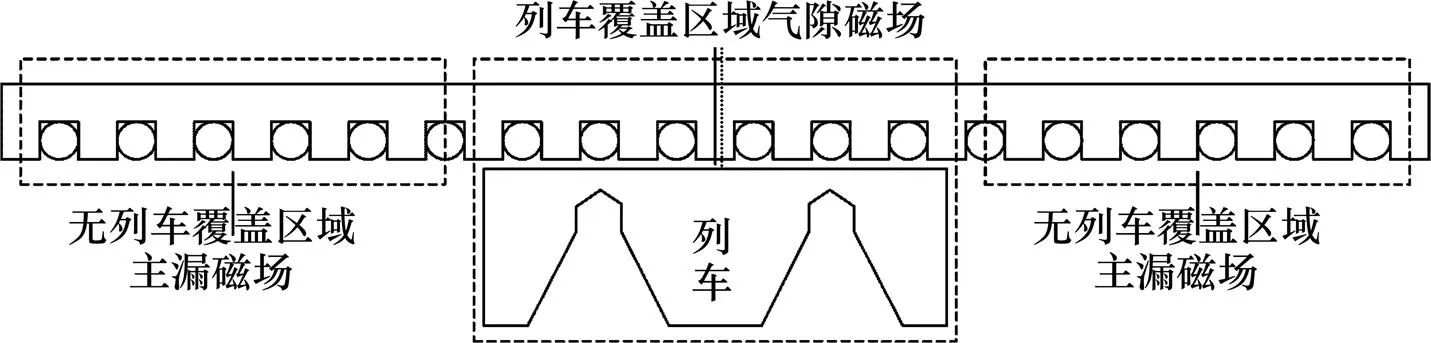
图1 定子磁场示意图

图2 等效计算模型
计算边界条件为:
1) 铁芯磁导率为无穷大,转子的标量磁位为0;即图2中=0时,=0。
式中:1为匝数;为定子电流;P为极对数。
根据磁场与磁位关系计算得定子表面处磁 场为

(为谐波次数)等效计算模型计算结果如图3所示,行波磁场表现为其在和向分量上为幅值大小约为0.028、周期为2τ(2倍定子极距)的正弦波,且其因齿槽原因存在高次谐波[12],其中第5和7次谐波较为明显。
1.2 行波主漏磁场有限元仿真计算
长定子仿真模型如图4所示,由铁芯和三相绕组组成,铁芯材料为硅钢片,绕组材料为铝,匝数为1匝,通入幅值为1 200 A,相位各相差120°的三相正弦交流电,设定电机同步速度为150 km/h,根据=2,需通入电流的频率为80.75 Hz,选取2对磁极进行仿真,设定车辆的运行方向为轴正方向,轨道覆盖区域是从=0 m到=1.032 m。根据高速磁浮列车悬浮间隙为10 mm,设距离定子齿下表面10 mm处(图中=10 mm)为参考线,仿真模型的具体尺寸如表1所示。

图3 行波磁场解析计算

图4 长定子轨道仿真模型
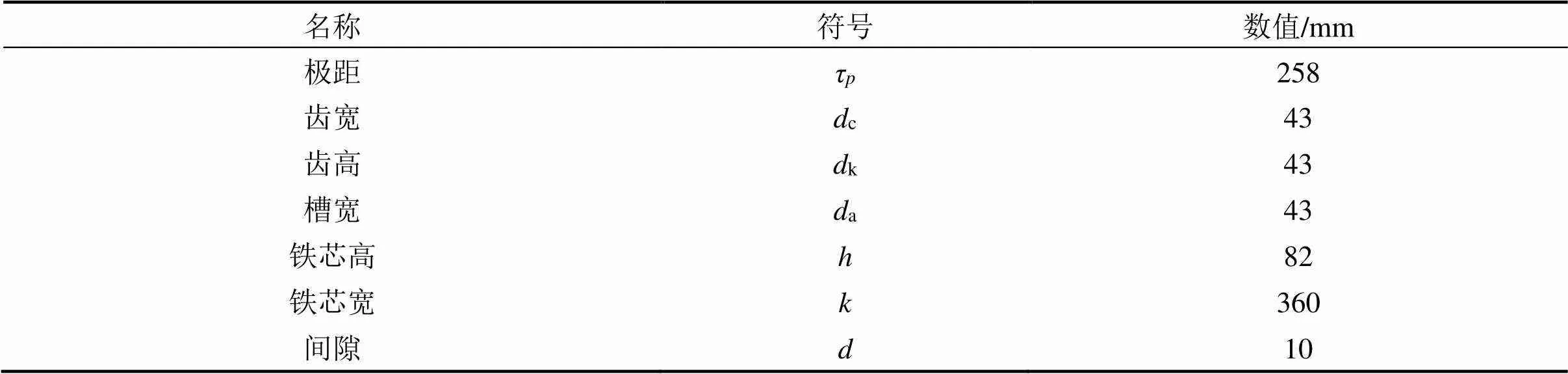
表1 长定子轨道模型尺寸
磁通密度分布情况如图5所示,行波主漏磁场在空气和铁芯中形成闭合回路,由于空气与铁芯磁导率相差很大,磁力线主要集中于铁芯内部,而空气中的磁场则表现较为发散,其分布区域几乎是有动子磁极位置的4倍。
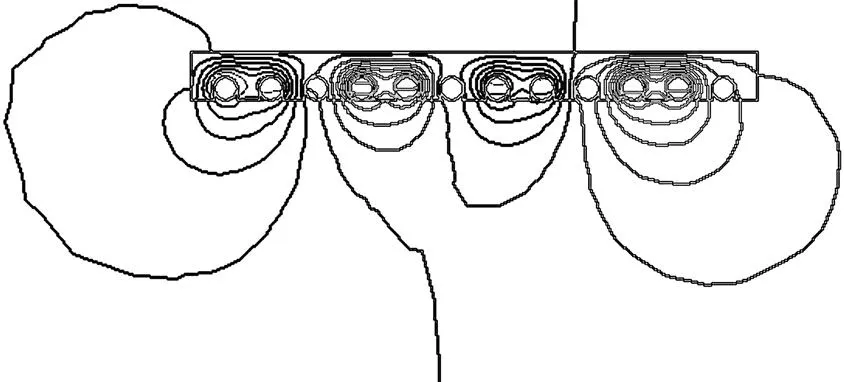
图5 磁通密度分布
行波主漏磁场仿真结果如图6所示,横轴对应坐标,纵轴表示磁通密度向分量,与理论计算基本一致,行波磁场为周期性分布,周期为2倍定子极距,波形有比较明显谐波分量,对其进行频谱分析,5和7次谐波分量较大,其中5次谐波占比约60%。
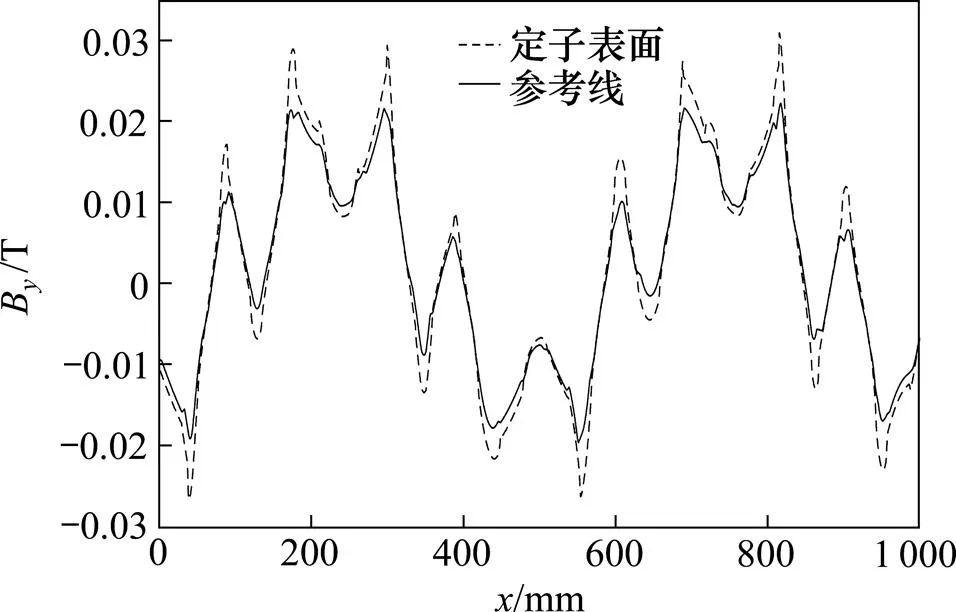
图6 行波主漏磁场仿真
2 定子电缆下挂故障分析
如图7所示,长定子绕组由单匝的输配电的高压电缆构成。这种电缆结构的绕组在列车运行一段时间后可能会发生电缆下挂的现象,下挂的电缆会导致牵引系统效率的降低,严重时电缆与磁浮列车接触发生刮擦而影响磁浮列车的运行安全。这种故障一般出现于高压直线大电机中,目前没有对此类故障进行检测研究的文献,在旋转电机中,定子电缆下挂对应定子绕组导线发生偏移,但介于2种电机结构的不同,旋转电机的定子绕组偏移故障检测方法不具有参考性[13]。行波磁场由三相定子绕组直接产生,磁场波形包含了定子条件的全部信息,因此可以通过对行波磁场的连续监测来达到对此类故障检测的目的。

图7 同步直线电机的长定子
定子齿槽结构如图8所示,电缆截面认为是圆形,则定子槽可以分为2部分,即电流域与无源域,因为只有电流域发挥作用产生磁场,所以定子电缆的下挂,对磁场的影响主要体现在槽中电流面域的减小。
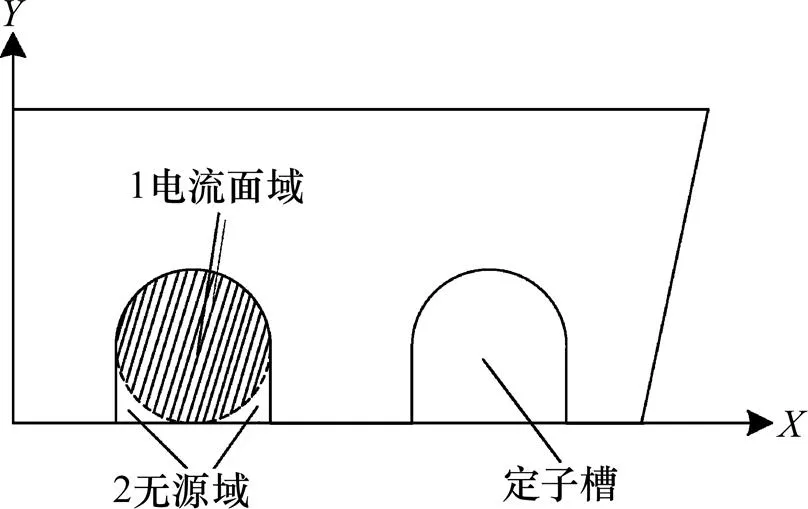
图8 定子齿槽示意图
假设铁芯磁导率为无穷大,忽略电缆绕组绝缘层厚度以及定子下挂漏出齿槽部分对磁场的影响,计算定子电缆下挂1 mm,则齿槽中的电流面域减小1.232 2×10−5m2,由于趋附效应,趋肤深度计算为9.42 mm,则电缆未下挂时有效电流面积为9.938×10−4m2,相当于减少电流10.48 A,根据1.1中的磁通密度计算公式,其值减少为原来的0.87%。定子电缆不同的下挂程度对磁场强度的影响如图9 所示。
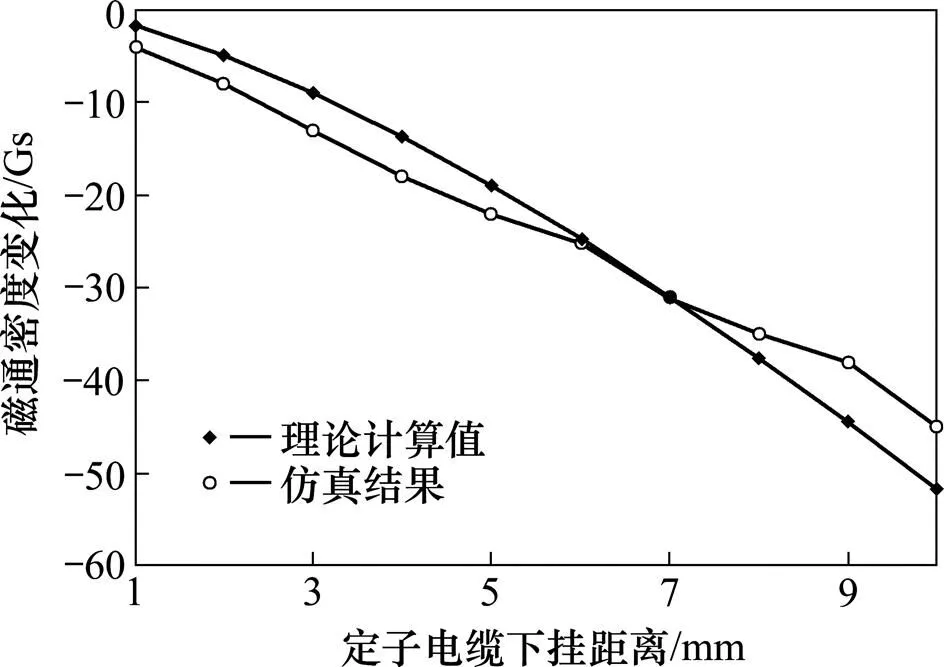
图9 定子电缆下挂对磁场强度的影响
由图9可知,磁场强度随定子电缆下挂距离的增大而逐渐衰减,由于定子电缆下挂出的部分也会产生磁场,而理论计算是以忽略电缆下挂出的部分对磁场的影响为前提,所以当定子电缆下挂的距离较大时,其求解的值比仿真值要大一些。
3 定子绝缘层破损故障分析
定子绕组电缆结构如图10所示,为电气屏蔽和传导接地电流,长定子电缆绕组中设计有金属屏蔽层,而该屏蔽层中因通入三相交流电而产生涡流,且随电流频率的增大而迅速上升,这一特点导致因速度的提升而易导致金属屏蔽层中涡流幅值增大进而产生较高的温度致使绕组绝缘层的老化,绝缘层耐压值也会随着老化程度的加深而降低,尤其与定子槽接触的部分涡流较大,容易发生破损故障,当绕组绝缘层发生破损时,电缆中的导芯将直接与铁芯接触发生单相接地故障[14];单相接地故障比较容易产生弧光而导致发生三相绕组短路,定子绕组的三相短路对同步电机的运行是一种严重的威胁,所以对三相绕组的突然短路分析有重要的意义。
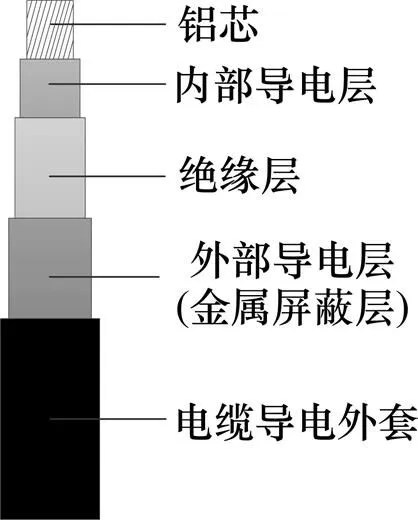
图10 定子绕组电缆结构示意图
三相绕组的短路问题可以利用叠加原理进行分析,即认为不是发生了短路,而是在原来稳态运行的定子端上加上了与原来电压大小相等方向相反的三相电压,若忽略电枢绕组中电阻的影响,短路发生后,三相短路电流产生纯去磁磁势,该磁势在三相绕组中产生的磁链与主磁链大小相等,方向相反。定子三相绕组中磁链可表示为[15]:

式中:0为主磁链。
短路发生后,磁链可表示为:

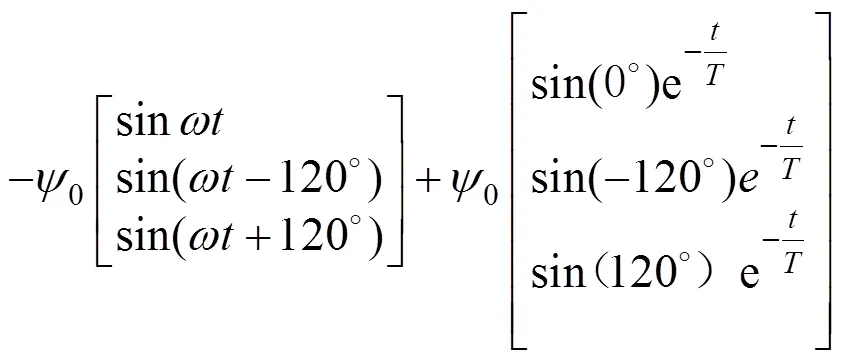
式中:为衰减时间常数,由绕组的电阻和电感 决定。
未被磁极覆盖的电枢绕组电感由自由空间的电枢反应电感、谐波漏感、定子槽漏感和端部漏感4项组成,可分别由式(3)进行计算得到[11]:

式中:为极对数;n为匝数;为铁芯宽度;为槽比漏磁导;为端部比漏磁导。
等效端部绕组为半圆形,且导体截面积考虑截面积,则绕组电阻计算公式为[16]:

式中:为常温下导体电阻率;01为导体截面积;b为定子铁芯宽度;为极距。
长定子绕组采用分段式供电,定子长度取决于线路坡度、速度及加速度,平均约为1 200 m。其额定电压(相)为4 250 V,额定电流(相)为1 200 A[14],如图11所示,采用电路和有限元区域耦合的方式仿真三相短路状态电流情况,仿真结果如图12所示,短路时刻为0.07 s,三相电流在0.075 s左右达到峰值电流,之后逐渐趋于稳定,其中最大短路电流可达到正常电流的10倍左右,最终稳态电流是正常电流的5倍左右。

图11 有限元区域与电路的耦合
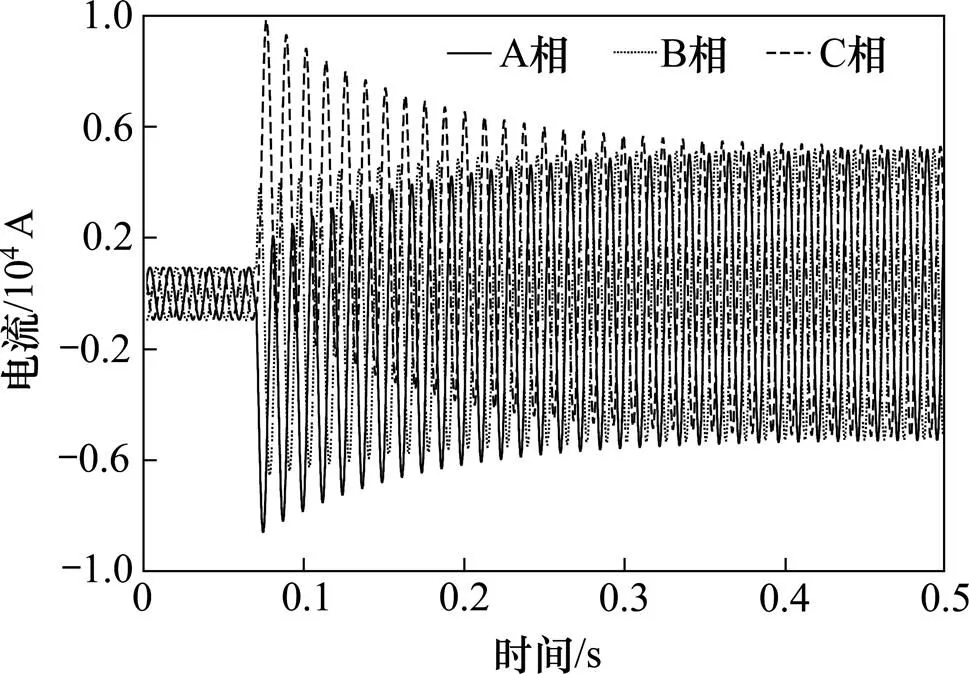
图12 三相短路电流仿真
利用Maxwell有限元仿真三相绕组突然短路和之后稳态的磁场情况,如图13所示,三相绕组发生短路故障,其行波磁场波形不变,幅值与绕组电流大小呈正相关而分别增大近10倍和5倍左右,相位不发生变化,由齿槽原因导致的高次谐波现象更加明显。
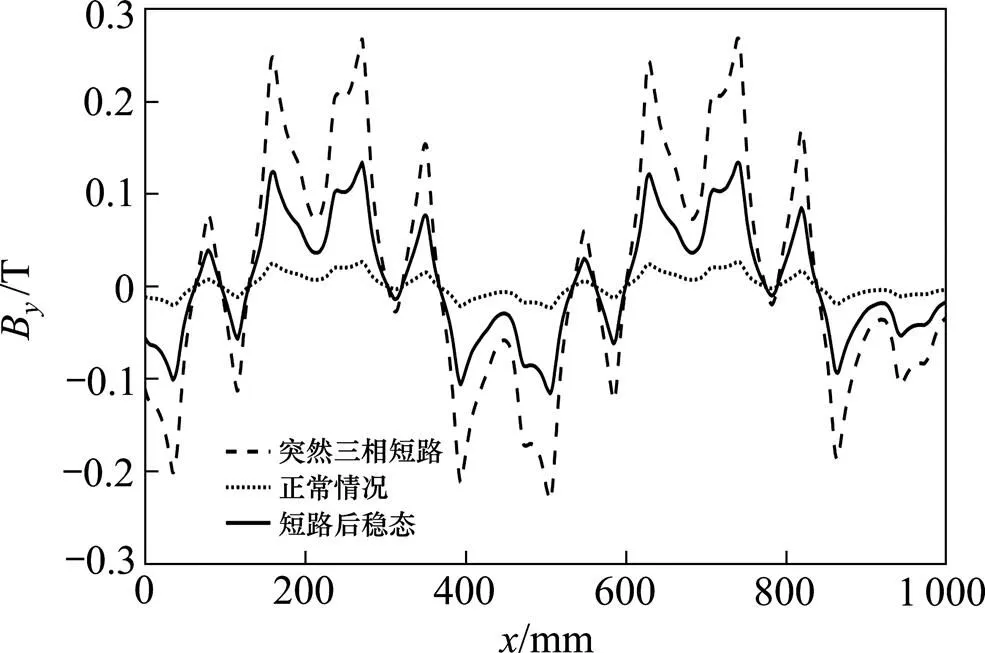
图13 三相绕组短路磁场分析
4 铁芯老化故障分析
长定子铁芯采用360片厚度为0.5 mm的硅钢叠片叠压制成,长期恶劣的工作环境会导致铁芯发生老化故障,其通常表现为铁芯绝缘层的破损而发生硅钢片间短路故障,此时在交流磁通的作用下,发生短路的铁芯部分比其他部分因为导体面积变大而使得电阻值降低进而导致产生比较大的涡流损耗降低电机的运行效率,严重时,铁芯会发热而发生局部融化。
硅钢片间短路故障通常因片间绝缘层老化导致,而实践证明,绝缘剩余寿命与运行时间并无明显的线性关系,所以硅钢片间短路故障的检测需要定期的检测与分析。硅钢片间短路故障引起的铁芯涡流幅值随短路叠片的增加而不断增加,一定幅值的铁芯涡流会影响定子绕组产生的行波磁场,同时增大铁芯损耗,减弱直线电机的推力。
在频域下,磁性叠片的研究问题常利用Berotti损耗分离法,将总磁芯损耗分解为静态磁滞损耗P,经典涡流损耗P和异常损耗P[17]:


式中:为激励频率;B为磁密的幅值;k为磁滞损耗系数;k为涡流损耗系数;k为异常损耗系数。
其中,涡流损耗系数公式为

式中:为电导率;为硅钢片的厚度。所以硅钢片发生片间短路,其厚度的增加将导致铁芯涡流损耗的急剧增加。
假设标准正弦波磁场励磁,则涡流损耗导致的磁场强度和磁滞磁场强度可由式(6)得出[18]:
忽略异常损耗导致的磁场强度部分,根据安培环路定理的微分方式可得[19]:

式中:0为真空磁导率,该式中双旋度的时间微分项,避免刻画涡流场的微观结构,正确反映了硅钢叠片材料中涡流效应对绕组磁化电流的抵消作用。
如图14所示,建立一对极的三维长定子轨道的仿真模型,为仿真硅钢片间短路情况,分别对铁芯材料的电导率采用各项同性和各项异性设置[20],其中各项同性电导率材料设置表示铁芯为一个整体,模拟硅钢片间短路情况,各项异性电导率材料设置表示正常的铁芯叠片情况。以距离铁芯定子齿下表面10 mm处中心线为参考线,仿真不同数量硅钢片短路异常情况如图15所示。
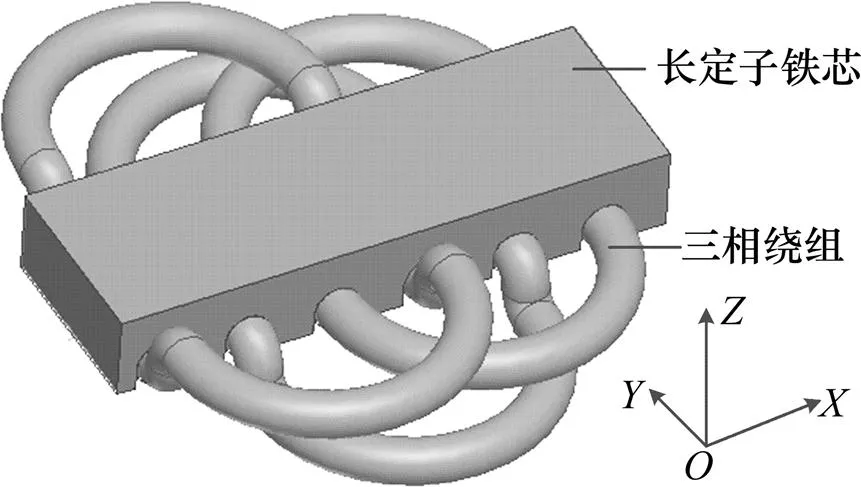
图14 三维仿真模型

图15 不同程度铁芯片间短路异常情况的行波主漏磁场仿真
Fig. 15 Simulation of magnetic field with different degrees of short circuit between sheets
仿真结果显示磁通密度随发生短路情况的硅钢片数量的增多而减小,对应前文分析所述硅钢叠片材料中涡流效应对绕组磁化电流的抵消作用。
5 轨道错牙故障分析
高速磁浮的长定子轨道采取拼接式的结构,这种结构易导致轨道发生定子段大错牙故障,而由于无动子磁极的行波磁场比较发散,行波磁场的幅值大小与其位置到轨道齿下表面的距离密切相关,且随距离的增大而变化梯度较为明显,所以当发生轨道上下偏移故障时,由于行波磁场检测装置的位置不变,其与轨道齿的下表面距离发生变化,进而导致检测到的行波磁场发生变化,其表现为轨道向上偏移,检测位置行波磁场幅值变小,轨道向下偏移,检测位置行波磁场幅值增大。
轨道不同偏移距离对应参考线位置磁场的表现仿真如表2所示。

表2 轨道不同偏移距离的磁场仿真结果
建立简化单相绕组仿真模型,讨论轨道发生左右偏移故障的磁场情况以及三相绕组因闭合而伸出轨道外部分对行波磁场的影响,如图16所示,等效绕组伸出轨道部分为半圆形。参考面采用平行且距离铁芯齿下表面10 mm的平面,仿真其磁通密度情况如图17所示。

图16 简化版仿真模型
图中虚线部分正对轨道下方,仿真结果显示,参考面处虚线内的磁通密度的分布沿方向的变化不大,而伸出轨道外边界外的磁场衰减比较大,其中当距离轨道外边界10 mm处的参考面磁场与中间位置处磁场相比较衰减有52 Gs。由此可得出 结论:
1) 气隙磁场主要集中于正对轨道下方,伸出轨道外边界的绕组对气隙磁场的影响较小;2) 轨道下方正对的磁通密度的分布沿方向的变化不大,所以利用等效二维模型对行波磁场的仿真是有效的;3) 当轨道发生左右位置偏移故障时,可以通过检测沿方向上不同位置的磁敏传感器来实现,即正常时,所有磁敏传感器均处于轨道下方正对的气隙磁场处,测量结果差距不大,而发生左右偏离故障时,处于边缘与中间位置的磁敏传感器的检测数值差距较大。

图17 参考面磁通密度仿真
6 结论
1) 定子电缆下挂故障导致行波磁场的幅值大小随下挂距离的增大而减小,其中下挂距离4 mm时,行波磁场幅值减小18 Gs。
2) 定子绕组突然发生三相短路故障导致定子电流瞬时达到原电流10倍之后稳定于原电流5倍大小,行波磁场幅值大小与定子电流成正比变化。
3) 铁芯老化导致的绝缘层破损而发生的硅钢片片间短路故障导致短路处硅钢片内感应涡流增大,涡流对绕组磁化电流具有抵消作用,仿真180 mm厚硅钢片发生短路故障时行波磁场幅值减小约50 Gs。
4) 轨道发生上下偏移故障时,行波磁场幅值随向上偏移距离的增大而减小,随向下偏移距离的增大而增大,其中偏移3 mm时,行波磁场幅值变化25 Gs左右;轨道发生左右偏移故障时,正对轨道部分的行波磁场幅值变化较小,伸出轨道部分的磁场衰减较为严重,其中距离轨道外边界10 mm处的行波磁场衰减约52 Gs。
[1] Lampert T A, O’Keefe S E M. A survey of spectrogram track detection algorithms[J]. Applied Acoustics, 2010, 71(2): 87−100.
[2] GAO H, LI J. Detection and tracking of a moving target using SAR images with the particle filter-based track- before-detect algorithm[J]. Sensors, 2014, 14(6): 10829.
[3] Sojer D. Synthesis of fault detection mechanisms track: Real-time, embedded and physical systems[C]// Computer Software and Applications Conference. IEEE, 2011: 700−703.
[4] HamidA. Toliyat, 托利冶特, 南迪,等. 电机建模、状态监测与故障诊断[M]. 北京: 机械工业出版社, 2014. HamidA. Toliyat, Tolly, Nandi, et al. Motor modeling, condition monitoring and fault diagnosis[M]. Beijing: Mechanical Industry Press, 2014.
[5] 赵洪森, 戈宝军, 陶大军, 等. 定子绕组匝间短路对发电机电磁转矩特性的影响[J]. 电工技术学报, 2016, 31(5): 192−198. ZHAO Hongsen, GE Baojun, TAO Dajun, et al. Effect of inter-turn short-circuit of stator winding on electromagnetic torque characteristics of generator[J]. Transactions of China Electrotechnical Society, 2016, 31(5): 192−198.
[6] 阳同光, 桂卫华. 基于KPCA 与RVM 感应电机故障诊断研究[J]. 电机与控制学报, 2016, 20(9): 89−95. YANG Tongguang, GUI Weihua. Research on fault diagnosis of induction motor based on KPCA and RVM[J]. Journal of Electric Machines and Control, 2016, 20(9): 89−95.
[7] 于芳. 直线同步电机运行状态计算和故障仿真分析[D]. 南京: 东南大学, 2010. YU Fang. Operational state calculation and fault simulation analysis of linear synchronous motor[D]. Nanjing: Southeast University, 2010.
[8] 岳啸鸣, 郝锋, 范辉, 等. 旋转电机定子铁心片间绝缘故障检测方法浅析[J]. 微电机, 2015, 48(7): 104−109.YUE Xiaoming, HAO Feng, FAN Hui, et al. Analysis of insulation fault detection method between stator core pieces of rotating electric machines[J]. Micrbmotors, 2015, 48(7): 104−109.
[9] 王蔚溪. 高铁牵引电机的状态监测与故障诊断技术研究[D]. 青岛: 青岛科技大学, 2017. WANG Weixi. Research on condition monitoring and fault diagnosis technology of high-speed traction motor [D]. Qingdao: Qingdao University of Science and Technology, 2017.
[10] Puche-Panadero R, Pineda-Sanchez M, Riera-Guasp M, et al. Improved resolution of the MCSA method via Hilbert transform, enabling the diagnosis of rotor asymmetries at very low sIip[J]. IEEE Transactions on Energy Conversion, 2009, 24(1): 52−59.
[11] 郭芳, 张奕黄. 长定子直线同步电动机轨道空间处的电枢反应电抗和谐波漏抗[J]. 电机与控制学报, 2002, 6(4): 271−274. GUO Fang, ZHANG Yuhuang. Armature reaction reactance and harmonic leakage resistance in track space of long stator linear synchronous motor[J]. Journal of Electric Machines and Control, 2002, 6(4): 271−274.
[12] 许孝卓, 汪旭东, 封海潮, 等. 分数槽集中绕组永磁同步直线电机磁场解析计算[J]. 电工技术学报, 2015, 30(14): 122−129. XU Xiaozhuo, WANG Xudong, FENG Haichao, et al. Analytical calculation of magnetic field of permanent magnet synchronous linear motor with fractional slot winding[J]. Transactions of China Electrotechnical Society, 2015, 30(14): 122−129.
[13] Neti P. Stator fault analysis of synchronous machines[J]. Dissertation Abstracts International, 2007, 68(6): 4029.
[14] 沈浩然, 张建华, 丁磊, 等. 双馈异步发电机单相接地故障瞬态特性研究[J]. 电力系统保护与控制, 2015, 43(18): 6−11. SHEN Haoran, ZHANG Jianhua, DING Lei, et al. Transient characteristics of single-phase earth fault in doubly-fed asynchronous generator[J]. Power System Protection and Control, 2015, 43(18): 6−11.
[15] 王北社, 田德见. 永磁同步发电机三相突然短路过渡过程的分析与探讨[J]. 东方电机, 2013, 29(1): 36−39. WANG Beishe, TIAN Dejian. Analysis and discussion on three-phase sudden short circuit transition process of permanent magnet synchronous generator[J]. Dongfang Electric, 2013, 29(1): 36−39.
[16] 王立天, 李力鹏. 高速磁悬浮牵引供电系统[M]. 北京:北京交通大学出版社, 2014. WANG Litian, LI Lipeng. High-speed magnetic suspension traction power supply system[M]. Beijing Jiaotong University Press, 2014.
[17] Bertotti G. General properties of power losses in soft ferromagnetic materials[J]. IEEE Transactions on Magnetics, 2002, 24(1): 621−630.
[18] LIN D, ZHOU P, FU W N, et al. A dynamic core loss model for soft ferromagnetic and power ferrite materials in transient finite element analysis[J]. IEEE Transactions on Magnetics, 2004, 40(2): 1318−1321.
[19] 张长庚, 李永建, 杨庆新. 一种考虑磁滞和微观涡流效应的电磁模拟方法[J]. 中国电机工程学报, 2016, 36(21): 5966−5974. ZHANG Changgeng, LI Yongjian, YANG Qingxin. An electromagnetic simulation method considering hysteresis and microscopic eddy current effects[J]. Proceedings of the CSEE, 2016, 36(21): 5966−5974.
[20] 王坚, 林鹤云, 房淑华, 等. 利用等效电导率进行叠片铁心涡流场分析的有效性和精确性(英文)[J]. 中国电机工程学报, 2012, 32(27): 162−168.WANG Jian, LIN Heyun, FANG Shuhua, et al. Effectiveness and accuracy of eddy current field analysis of laminated core using equivalent conductivity[J]. Proceedings of the CSEE, 2012, 32(27): 162−168.
Analysis and research on several faults of high speed Maglev train long stator track
LUO Rudan, WU Jun, WANG Zhiren
(College of Intelligent Science and Technology, National University of Defense Technology, Changsha 410073, China)
The track of the high-speed maglev train is a long stator of a synchronous linear motor system which is very different from the wheel-rail traffic. It is laid with a long distance in the open air. Due to various factors, there may be a stator cable under the suspension and a stator cable insulation. Various failure modes such as breakage, aging of the core and large faults between the stator segments, these faults will affect the safe operation of the train. In the long-distance orbital condition, in order to realize the rapid detection of the above faults, the magnetic field was taken as the object, the long stator motor of the high speed maglev train and its orbit were modeled. The performance of the traveling wave magnetic field under the above fault mode was simulated and analyzed. The law between the performance of the main leakage magnetic field and the fault was discussed. The failure of the cable hanging and the aging crack of the iron core layer corresponds to the weakening of the traveling wave magnetic field by 25%; the damage of the winding insulation layer causes the three-phase short- circuit fault to increase the intensity of the traveling wave magnetic field by nearly 5 times, and the 5th and 7th harmonics are also more obvious; the different magnitudes of the traveling magnetic field amplitude corresponds to the track malocclusion in different directions of the orbit. When the upper and lower offset is 3 mm, the degree of change is about 10%. These rules provide a theoretical basis for the subsequent detection of the track fault.
high-speed Maglev train; track fault detection; main leakage magnetic field of the traveling wave; electromagnetic field analysis
TM341
A
1672 − 7029(2019)11− 2658 − 10
10.19713/j.cnki.43−1423/u.2019.11.003
2019−03−03
“十三五”国家重点研发计划资助项目(2016YFB1200602-40)
吴峻(1973−),男,江西玉山人,研究员,博士,从事磁悬浮技术研究;E−mail:wujun2008@nudt.edu.cn
(编辑 蒋学东)
