模糊控制技术在汽车ABS系统上的应用研究
2019-12-11吴俊
吴俊
武汉商学院 湖北 武汉 430000
引言
车辆在路面行驶,其安全性可分为主动安全和被动安全两种类别。主动安全是车辆安全系统提前工作从而最大程度避免事故发生的能力。被动安全是车辆不可避免发生事故情况下,最大程度避免车内成员发生伤害的能力。除了通过一定的法律法规保证汽车行驶的秩序,减少交通事故之外,在车辆上也必须具备相关的控制部件(防抱死制动系统、辅助约束系统)确保车辆行驶过程中的安全性。随着汽车数量的急剧增长,对车辆安全尤其是主动安全的要求也越来越高,不仅加强了交通秩序的管制,而且对汽车这个现代交通工具自身的安全性也提出了新的要求。目前车辆上安装涉及行驶安全系统的种类越来越多,控制效果也越来越满足实际行车需求,比如,ABS系统、ESP系统。这些系统可以有效避免事故的发生或减轻事故发生所带给车内乘员伤亡的概率。
1 汽车ABS系统控制方式
汽车ABS系统能够有效保证车辆制动时不会因为制动力太大从而使得轮胎相对地面发生抱死的情况,系统根据相应的传感器获取轮胎转动状况,通过调整车轮制动力来保证车轮相对于路面不会发生较大程度地滑移,从而在保证制动稳定性条件下尽可能较少制动距离。
ABS的控制方式虽然较多,但都是通过调节制动力,充分利用路面附着性能,更加有效地控制车辆制动。控制参数选取是否得当,不仅关系到ABS的控制逻辑和性能,而且还关系到ABS的结构和成本。
(1)车轮滑移率控制方式
车辆的最佳滑移率是指滑移率处于20%附近的滑移率,此时轮胎能够获得最佳的纵、侧向附着系数,车辆的稳定性最好。通常理想状况下,我们希望车轮行驶状态可以与滑移率曲线重合,但由于汽车行驶过程中,工况一直处于变化的状态,且这些工况的变化并无具体的规律可循,因此 ABS的传统控制方法并不会处于一个最佳状态。
(2)逻辑门限值控制方式
ABS发展至今,采用最多的控制方式是逻辑门限值控制方式。车辆通过采用加、减速度门限作为控制门槛值,将参考滑移率值设置为辅助信息。车辆如果单独采用门限值作为控制门槛,则容易出现控制超调现象。因此,将两种信息综合处理,可以有效提高控制精度。目前,大部分厂家所采用的控制策略是用车轮速度,通过设定的车辆制动减速度值算出参考车速,再求出参考滑移率。这样,设定的车辆制动减速度值是否合适,将直接影响控制系统品质的优劣。使用逻辑门限值的ABS系统,其各类车辆之间兼容性不好,。对不同配置的车辆,其控制参数值不一样。此外。系统工作所需的部分数据无法通过理论模型计算得出,只能依靠大量实验获得经验数据,从而缺乏理论根据。
(3)最优控制方式
由于逻辑门限控制方式存在不可避免的缺点,一种基于最优化控制方式的ABS系统慢慢发展开来。它可以根据车辆-地面系统的数学模型,用状态空间的概念,在时域内研究ABS。这是一种基于模型的控制,是一种分析型的系统。该方法根据ABS的各项控制要求,按最优化原理,得到控制系统的最优化控制指标。但控制系统的效果基本取决于于车辆-地面系统数学模型的精度,而数学模型与实际工况有一定的误差,加上车辆行驶中的各种参数变化的影响,使得系统控制效果不良。
(4)滑模变结构控制方式
基于上述两种控制方式的不足之处,行业内又提出了滑模动态变结构控制系统。它以经典的数字控制理论为基础,系统稳定性强。滑模动态变结构控制属于一类特殊的非线性控制系统,其结构根据系统当时的状态、偏差及其导数值在不同的控制区域,以理想开关的方式切换控制量的大小和符号。系统由受控对象和一个变结构控制器组成。其控制目标是使实际制动时,车辆滑移率尽可能满足最佳滑移率曲线。目前,能够满足要求的车速传感器,由于其成本太高而不可能采用,加之实现该控制方式的伺服机构仍比较复杂,另外需要满足该控制方式的伺服部件工作原理复杂,因此ABS系统中较少采用此类控制方式。
(5)模糊控制方式
模糊控制具有不依赖对象的数学模型,便于利用人的经验知识,在汽车的ABS中正开始应用。模糊控制原理图如图1所示。系统采用双输入信号、单信号输出结构,以滑移率误差e及滑移率变化ec作为输入量,经模糊计算得到的输出量u作为制动轮缸压力控制信号,确定ABS压力调节器的压力调节值。滑移率误差e为期望滑移率λ0和实测的滑移率λ之差,滑移率误差变化率ec为e的一阶导数。通过计算机仿真研究和在试验台上的试验研究结果表明,模糊控制技术在汽车ABS上的应用改善了其性能,使汽车的制动性能变得更好;基于模糊控制技术的汽车ABS的预测性增强,制动更加平稳,显示出汽车ABS模糊控制系统具有进一步研究和开发价值,应用前景良好。

2 ABS控制原理
(1)ABS理论基础
汽车行驶在路面上,地面能够提供的附着力是轮胎与路面之间的摩擦力。因此,车辆的载荷和路面能够提供的附着系数决定了汽车所能受到附着力的大小,其关系为

其中 Fμ-轮胎与路面间的附着力
FN-轮胎与路面间的垂直载荷
μ-轮胎与路面间的附着系数
由式(1-1)可知,最大程度减少制动距离,增加制动减速度就需尽可能提高轮胎与路面之间的附着系数μ。因为附着系数μ随着路况的变化处于不断变化中,其值与车辆滑移率有关。滑移率定义为:
其中 -汽车行驶的瞬时速度
ω-车轮角速度
R-车轮滚动半径
(2)ABS基本组成
ABS系统在常规制动装置的基础上,增设轮速传感器、电控单元(集成液压调节单元)和ABS报警灯。轮速传感器用以实时计算车轮转速。电控单元以此信号为基础进行计算。经电控单元计算汽车参考车速、车辆加速度(减速度),并对计算结果与设定的基准值比较,发出控制指令信号,控制液压调节单元从而调节制动压力。此外,电控单元还具有对整个ABS工作状况进行自检和安全监视警告功能。
(3)ABS分类
ABS控制通道通常是指制动压力调节器通往制动器的独立控制的液压通过。按控制通道数量的不同,ABS可分为单通道、双通道、三通道及四通道式,目前应用最为广泛为四通道式ABS系统。
3 模糊控制策略
(1)模糊理论
美国计算机与控制论专家L.A.Zadeh教授于1965年率先提出了模糊集概念,创造了研究模糊性或不确定性问题的理论方法。模糊理论与技术一个突出的优点就是对复杂事物和系统可以进行模糊度量、模糊识别、模糊推理、模糊控制与模糊决策。模糊控制理论是一种非常有应用价值的理论,其优点主要有:
1)对于难以建立相应数学模型的复杂问题,利用模糊语言控制策略能够使得问题简化,控制更加高效。
2)模糊控制方法简单、形象,研究难度不大。
3)系统控制效果好于传统PID控制,参数适应性强。
(2)模糊控制器设计
模糊控制系统关键是模糊控制器的设计。模糊控制器一般包括作为输入部分的模糊化接口,作为相应控制规则存贮的知识库(数据库、规则库)、模糊推理机和作为输出部分的解模糊接口等三大部分,如图2所示。其中,输入部分是将确定的输入量转化成对应的系统处理矢量;知识库用以存贮系统控制需要应用到的各类子集和系统控制规则;推理机将由输入部分输入信息根据知识库有关规则进行推理并将推理结果发送至输出部分;解模糊控制接口则将推理机处理结果转换成相应的精准量最终输出。
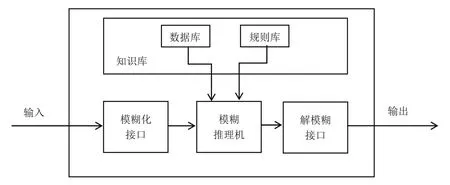
图2 模糊控制器组成图
1)输入、输出变量确定
ABS系统控制的最终目的是将当前车轮滑移率控制于最佳滑移率范围内,故可将期望滑移率(最佳滑移率)作为输入目标,输出变量作为制动器轮缸压力增量。根据附着系数与滑移率的关系曲线图,最佳滑移率取值15%-25%,车轮的实际滑移率为0-100%,所以系统控制误差的取值范围可为-85%-25%,考虑到误差范围应尽可能缩小,故最终误差取值范围为-20%-20%。
2)模糊规则设计
模糊化过程中,可选用三角函数作为隶属度函数,将误e及输出变量u分为7个子集,根据输入、输出变量关系,建立模糊控制规则表,如表1所示。模糊推理方法选用Mamdani最小推理法,解模糊化采用二等分法。
(3)系统仿真
根据相应模糊控制器设计,可将ABS系统模型导入MATLAB/Simulink软件中,结合创建的模糊控制器,对ABS系统进行模型仿真,从而得出前后轮滑移率、车辆制动距离及前后轮制动压力随时间变化曲线,从而得到保证制动稳定性基础上获得最大制动距离的仿真结果,验证模糊控制技术在汽车ABS系统上的应用可以达到比较理想的控制效果。
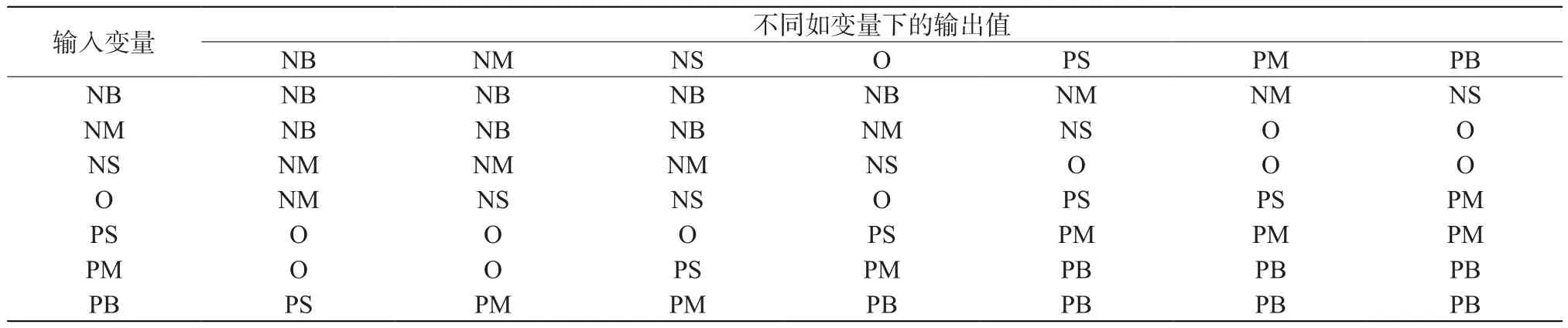
表1 ABS模糊控制规则
4 结语
模糊控制作为一种智能控制方法,具有不依赖数学模型,鲁棒性能好的优点,越来越成为解决当今复杂问题的一种技术手段。通过模糊控制规则的建立以及模糊控制器的设计,以期达到ABS系统工作过程中更优的控制效果。通过导入MATLAB软件,可以验证具有模糊控制的ABS系统在不同附着系数的路面上都具有更好的制动效果,从而提高了ABS系统工作效率,具有极为广泛地应用前景。
