基于点云数据的轨道结构与隧道空间限界一体化自动检测方法研究
2019-11-29陈国栋段晓峰
陈国栋,韩 峰,段晓峰,牟 航
(兰州交通大学土木工程学院,兰州 730070)
引言
铁路隧道限界是铁路建筑物接近限界中的一种,建筑物接近限界是与线路中心线相垂直,以钢轨顶面为基准的特殊尺寸的横断面轮廓,除机车车辆和与其作用的建筑物与设备外,其他建筑物和设备均不得侵入[1]。目前国内已有多种铁路隧道限界的检测方法。根据限界标准制作可伸缩框架的限界车[2],但需要在不同的路段人工调整检测车框架。采用全站仪配合反射棱镜进行单点测量[3],但人工工作量大,获取的隧道轮廓与轨道位置分离,不能准确反映两者对应的相互位置关系,造成限界检测误差较大。根据CCD视频摄像原理,研发了利用视频摄像技术对隧道进行限界检测的系统[4],但该系统对光线环境要求较高,在隧道中的应用受到限制。激光隧道断面仪采用二维激光测量可以直接获取隧道断面[5],但一次架站只能检测该处与隧道中线垂直的单个断面。装载激光测距传感器的手推车载式检测小车也开始引入到隧道限界检测中[6-8],但小车推行过程中易受车体测速不准和空转打滑的影响。法国、德国等国家研发了基于多传感器集成的隧道限界检测车[9-10],可以快速动态的获取隧道断面,但对行车干扰大,检测成本高昂,还需要考虑振动补偿。
地面三维激光扫描仪以无接触测量的方式,能高精度的获取物体的三维点云数据,并且对光线环境要求较低[11-13]。本文提出了一种基于地面点云数据的轨道结构与隧道空间限界一体化自动检测方法,依据钢轨点云建立限界检测模型,隧道任意位置断面的限界情况可以直接根据点云数据中断面轮廓与两钢轨的相对位置关系得到。该方法能实现不同隧道类型下的限界侵限自动判断,并给出侵限位置、侵限尺寸及侵限断面图。以响沙湾隧道进出口段为实验研究对象,验证了本文的限界检测方法,其精度可以满足要求。
1 隧道点云获取与预处理
考虑到隧道结构狭长的特点,按照文献[14]提供的思路,采用在线路中心间隔一定距离设站的方法进行扫描,相邻测站数据采用3个不共线靶球进行拼接。
利用三维激光扫描仪得到是呈扫描线式的点云数据,但是由于隧道内部粉尘、气压等外部因素的影响,不可避免地会产生孤立噪声点,应设法将其滤除,即对点云进行去噪处理。方法是先构造k-d树[15],然后搜索某一点领域半径内的近临点个数,若小于预定阈值,则判断该点为孤立噪声点,同时此方法可以较好保持点云的原始位置。
2 隧道横断面提取方法
在隧道限界检测中,需要对隧道的横断面进行分析研究,为此要先提取隧道中轴线。在中轴线上任取一点,都可计算出隧道在该处的走向,隧道走向与所要截取的横断面相正交[16-17]。经拼接去噪后的点云数据量多达数十亿个,直接计算起来难度较大,若对点云抽稀过大又影响中轴线提取的精度,可采取分段处理方法提取隧道中轴线以提高运算效率。
2.1 隧道中轴线拟合
将三维点云数据投影在XOY面,如图1所示,以Y方向的最小值和最大值为起止点,并沿Y方向设置合理步长Δy=0.05 m,然后用微分步长法对隧道两侧的边界点进行提取。
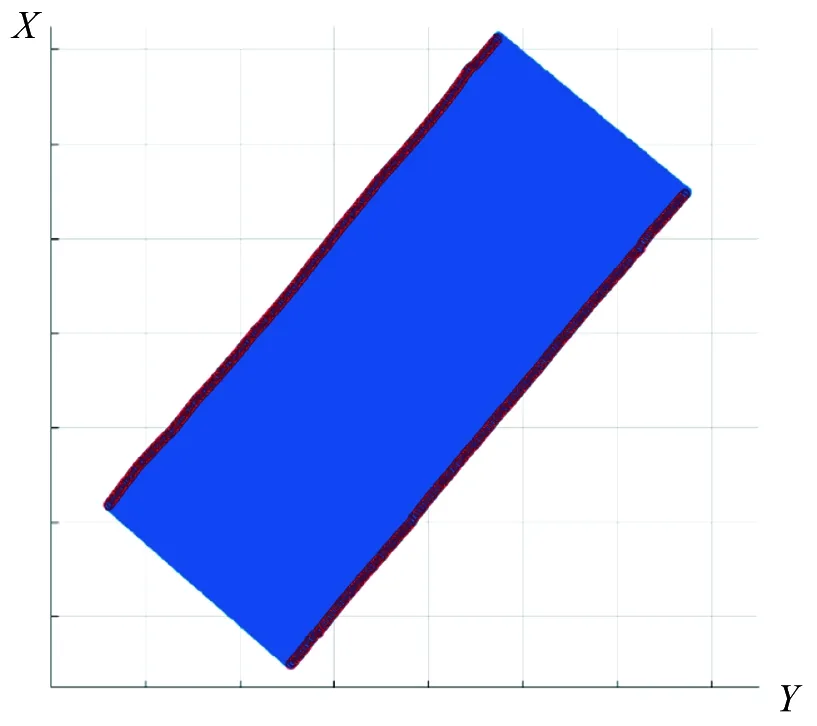
图1 点云在XOY面的投影
微分步长法的具体步骤是:沿Y轴将点云细分成多个等长的细条状单元体,然后依次搜寻每个单元体上X坐标值最大和最小的点。如图2所示,得到的点集1和点集2构成了边界点。
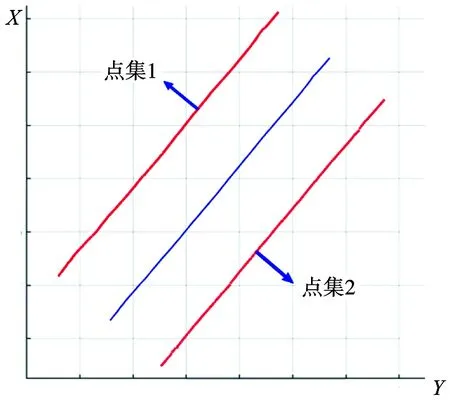
图2 边界点拟合中轴线
点集1中的每个点都能在点集2寻找到与其对应的距离最近的一点,它们构成一对边界点。计算每一对边界点的中点,根据一系列中点坐标对中轴线进行二次曲线拟合。同理对点云作YOZ面投影,进行中轴线的拟合,最后得到的隧道中轴线可表示为x,z关于y的方程
(1)
2.2 隧道断面截取

y=yp+x′(x-xp)+z′(z-zp)=0
(2)
设截取断面厚度为d,则属于该断面内的点集Φ(xi,yi,zi)满足

(3)

截取的隧道断面[xiyizi]T经式(4)姿态调整后,其相应的坐标值变为[xjyjzj]T
[xjyjzj]T=RαRβ[xiyizi]T
(4)

通过点云姿态的调整,即可实现对隧道中轴线上任意位置的断面点云进行提取。在隧道中轴线上选择起止点位置,并预设断面间隔,可以进行隧道断面的连续提取。
3 限界检测分析
3.1 隧道限界标准尺寸
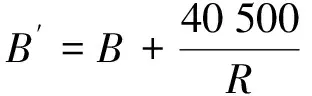
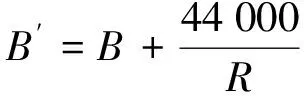
根据牵引种类,设计速度等条件的不同,隧道限界标准尺寸也有所不同。图3、图4分别为v≤160 km/h客货共线铁路电力牵引区段和内燃牵引区段的隧道限界标准尺寸[18]。此外,对曲线段隧道的限界标准尺寸应予以加宽[19],以轨面为测量基准时,曲线内侧建筑限界宽度加宽按式(5)计算,曲线外侧建筑限界宽度加宽按式(6)计算
(5)
(6)
式中B′——加宽后的曲线建筑限界标准半宽,mm;
B——建筑限界标准半宽,mm;
R——曲线半径,m。
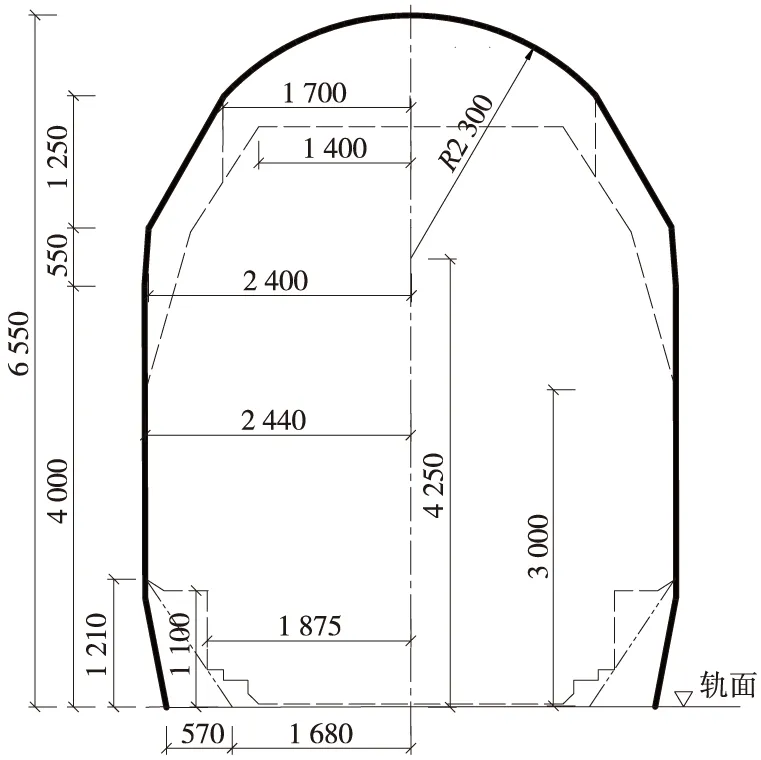
图3 v≤160 km/h客货共线电力牵引区段隧道限界标准(单位:mm)
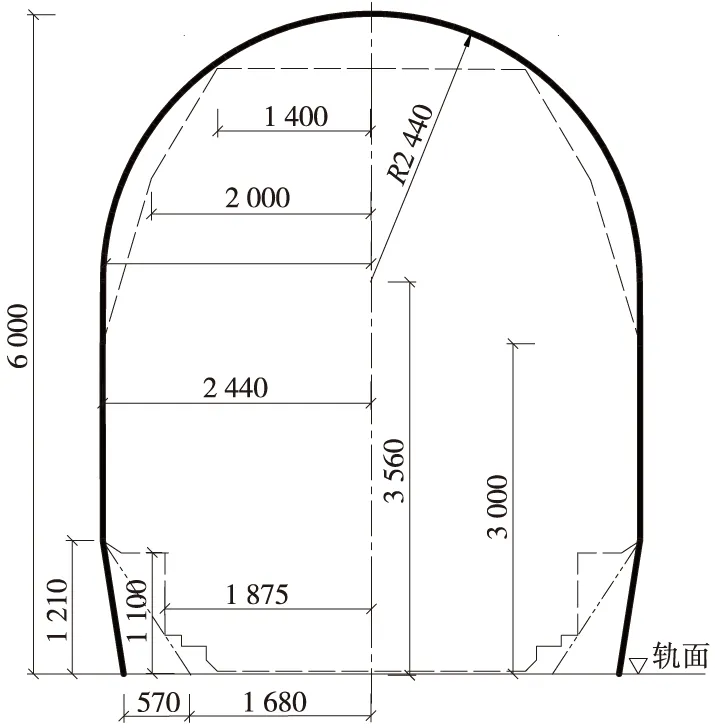
图4 v≤160 km/h客货共线内燃牵引区段隧道限界标准(单位:mm)
3.2 隧道限界检测坐标系建立
根据提取到的隧道横断面,把钢轨的轨面视作测量基准,隧道限界检测坐标系(O′,X′,Z′) 是以左右钢轨的轨面点连线为X′轴,以垂直平分轨顶连线中点所在铅垂线为Z′轴的直角平面坐标系,其坐标原点O′为左右两轨面点的中点。
3.2.1 轨面点提取
由上述限界检测坐标系的定义可知,建立隧道限界检测坐标系的基础是确定左右钢轨的轨面点。在隧道横断面内,对两侧的轨面点进行提取的过程,分为粗提取和精提取两个步骤。
(1)粗提取;首先结合中轴线坐标和轨距限制,将断面两侧隧道壁点云过滤,再结合高程限制,将拱顶点云予以过滤,从而只保留钢轨及其附近地面点云。
(2)精提取;结合钢轨为“工”字形的特点,寻找断面中两侧钢轨的轨面点,即筛选余下点云中左右两轨高程最大的点,从而来实现钢轨轨面点的精确提取。
3.2.2 坐标系转换
为了判断断面轮廓点是否侵入限界标准,还需要对断面轮廓点坐标系(O,X,Z)进行坐标转换,将其转换成与隧道限界检测坐标系相统一的坐标系(O′,X′,Z′),如图5所示。

图5 坐标系转换示意
两坐标系间的偏移参数为Δx,Δz隧道位于曲线地段时,X轴与X′轴之间会形成夹角θ,根据直角坐标系旋转平移变换公式,两坐标系中的点满足
(7)
3.3 侵限判别
三维激光扫描仪采集到的点云是一系列扫描轮廓点, 从几何学角度上来说,铁路隧道限界标准尺寸是一个多边形,因此可将限界检测中的三维碰撞问题转换为平面上点与多边形的位置关系。本文采用改进射线算法[20]判断断面扫描轮廓点是否位于该限界多边形内部,如图6所示,对其进行进一步优化,使得该法能进一步给出侵限值,图7说明了侵限判别的流程,其具体步骤如下。
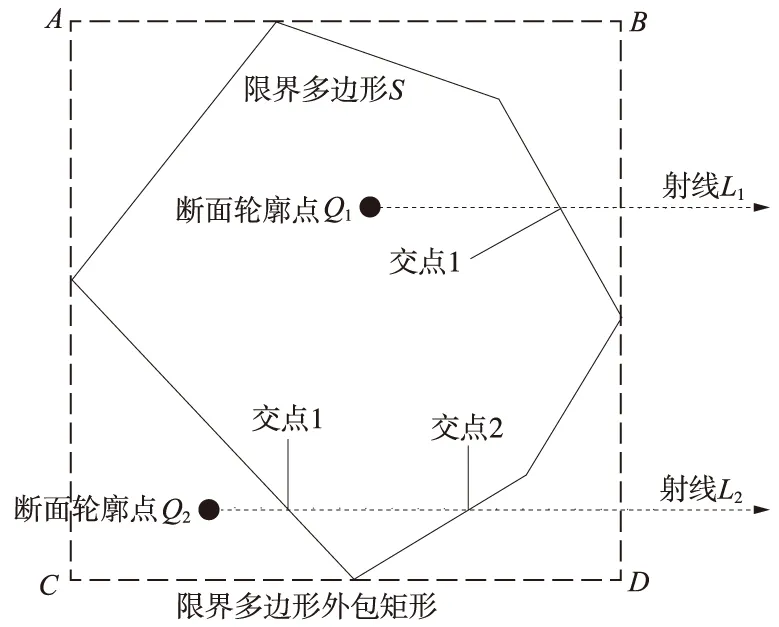
图6 改进射线法判断点与多边形位置关系
(1)首先判断点Q(x′,z′)是否在多边形外包矩形内,方法是游历获取多边形所在区域的xmax,xmin,zmax,zmin,对于该点若x′
(2)以该点为起点,向无穷远处引一条射线,计算这条射线与多边形的交点个数:若为奇数,则该点在多边形内部;若为偶数,则该点在多边形外部。
(3)若点Q位于多边形内部,可判断为侵限点,遍历其到限界多边形各条边的距离di,寻找其中的最小距离即是侵限值。
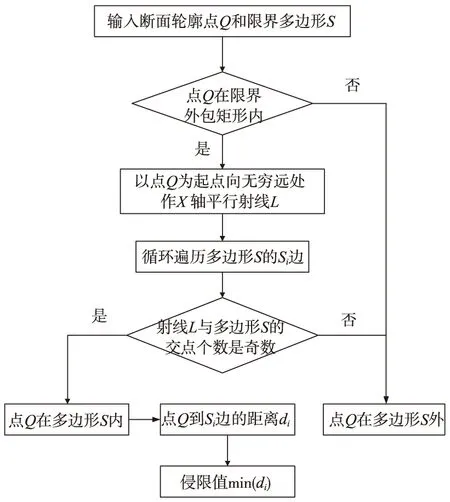
图7 侵限判别流程
4 实际工程验证
4.1 工程概况及数据采集
包神铁路响沙湾隧道地处库布其沙漠边缘,隧址区位于罕台川东岸S形河湾地段,地形起伏大。该隧道建成时间较早且属自稳定性差的风积砂地层,易发生隧道侵限病害。本文的实验数据采集于响沙湾隧道内的两段线路,其分别位于隧道进口和隧道出口处,工程现场如图8所示。
图8 工程现场
实验仪器使用Z+F IMAGER 5010C三维激光扫描仪,该仪器标称激光发射频率为100万点/s,角度分辨率δ为0.000 4°,根据弦长公式(8)可估计扫描区域不同距离R处的相邻点云间隔l。
(8)
现场作业采用沿线路中心“一”字形设站的方案,选取的测站间距为25 m。由式(8)计算可知,此时可保证扫描区范围内点云间隔小于0.3 mm,采集的实验数据集描述见表1。
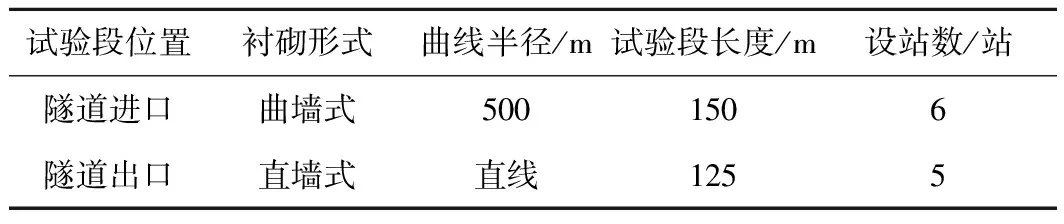
表1 实验数据集情况
4.2 点云数据处理与精度分析
经过拼接、去噪等预处理后的隧道进/出口段点云如图9所示。在用二次多项式对中轴线进行拟合的基础上,实现隧道断面的连续提取,本文断面间隔取为2 m。综合考虑点云密度和隧道限界检测精度要求,断面厚度阈值d取为1 cm,隧道断面提取结果如图10所示。

图9 隧道进/出口段点云俯视
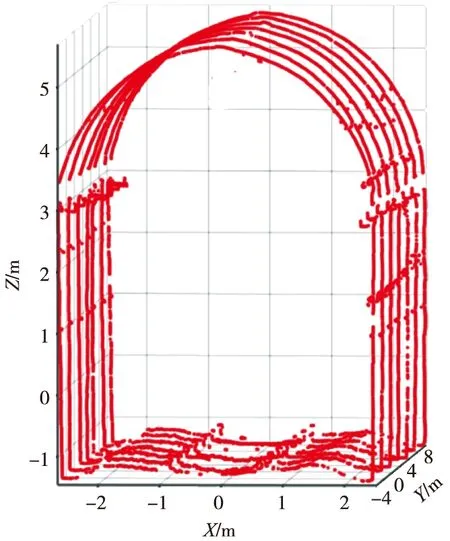
图10 连续提取隧道断面
通过轨面点的提取,建立了限界检测坐标系。为分析断面提取方法的可行性以及限界检测坐标系的精度,选取5处隧道断面,计算提取的轨面点m1和m2两点间的距离值lm,以轨距尺测量的轨距值作为真实值。轨距是指钢轨内侧距离钢轨顶面下方16 mm处两钢轨间最短距离,量测方法如图11所示。
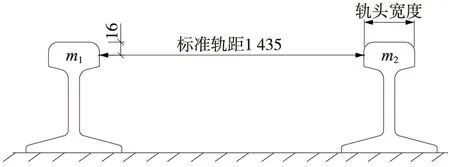
图11 轨距量测方法(单位: mm)
本实验的钢轨类型为60 kg/m,轨头宽度为73 mm,分别比较各断面轨距值与轨头宽度值之和与lm值大小,对测量结果的误差进行平均,得到的限界检测坐标系误差为8 mm,可见结果是较符合工程实际的,满足铁路隧道限界检测精度要求。
4.3 实验检测结果

图12 出口段侵限处隧道断面
本实验依照v≤160 km/h客货共线铁路的电力牵引区段隧道限界标准尺寸,同时对隧道进口段的限界标准尺寸予以加宽,运用上述方法编程对隧道进行侵限检测。实验检测结果表明:位于进口曲线段隧道的各断面均未发生侵限现象。在出口直线段,检测到有一处断面发生侵限,如图12所示。该断面位于距出口4 m处,根据提取到的断面信息,发现隧道左右侧壁的电缆槽位置均发生侵限现象。将右侧壁侵限位置局部图放大,如图13所示,可以直观地表征出隧道限界侵限情况。在该隧道断面上检测到有71个点发生侵限,其侵限值分布如图14所示,最大侵限值为30.6 mm。
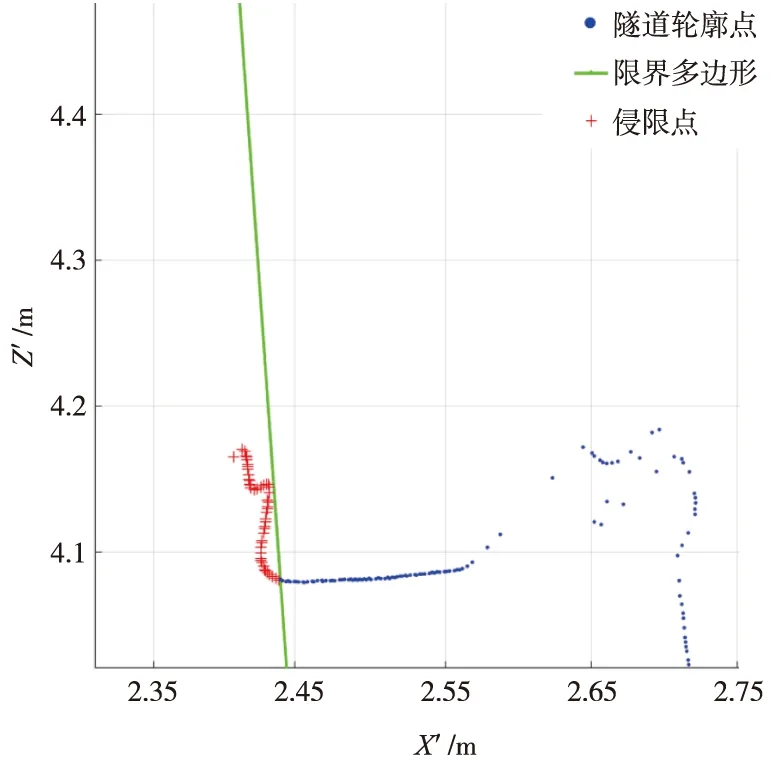
图13 侵限位置局部放大
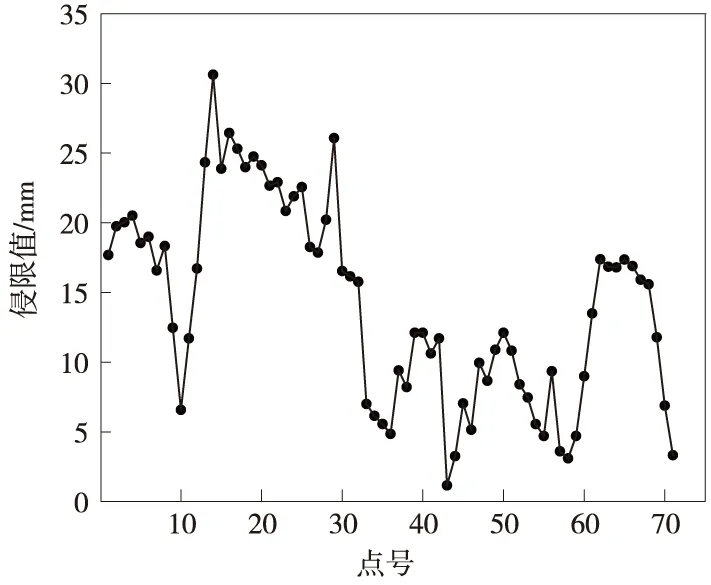
图14 侵限值分布示意
5 结论
(1)通过降维投影变换的方式,采用微分步长法获取点云边界点集,最终得到隧道空间中轴线,将点云依据中轴线进行旋转变换后,可在隧道任意位置等间隔提取隧道横断面。
(2)提出一种基于钢轨建模的检测方法,构建了以钢轨顶面为基础的隧道限界检测坐标系,将三维中限界检测问题转化为平面上点与多边形的位置关系。引入不同类型限界框,与隧道断面进行侵限运算,采用改进射线算法完成了限界的自动检测。
(3)通过实际工程表明,该方法的精度可满足工程应用,能准确地实现侵限点的自动判别,并给出侵限位置、侵限尺寸及侵限断面图,在隧道限界检测中有一定的实用性和可行性。
本文提取的隧道断面间隔较大,虽然提高了检测效率,却未能全面反映整段隧道限界状况,如何能快速提取并分析更小等间隔断面这一问题有待深入研究。此外,结合文中的成果可进行后续的隧道模型构建及变形分析等应用研究。