九开关变换器驱动六相PMSM的容错控制
2019-11-25刘陵顺李永恒吕兴贺
刘陵顺,胡 光,李永恒,吕兴贺
(1.海军航空大学 航空基础学院,烟台 264001; 2.中国人民解放军92279部队,烟台 264001)
0 引 言
六相电机可以低压大功率输出并且提高了容错能力,在电动汽车等领域得到了越来越广泛的应用[1]。电机的定子是由两套互差30°的三相绕组构成,两套绕组的中性点是隔离的,如图1所示。
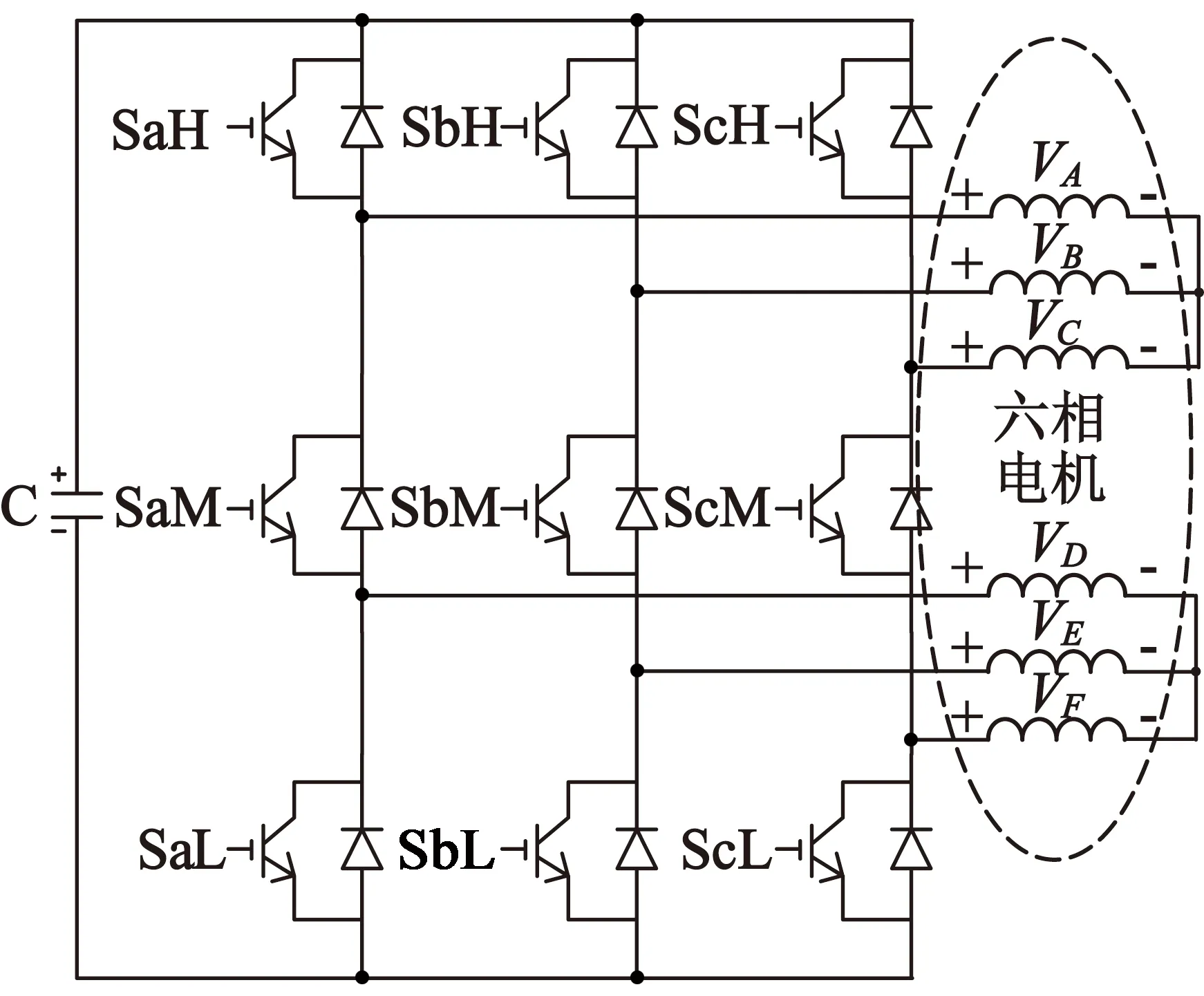
图1 基于九开关变换器的双Y移30°PMSM驱动系统
多相电机的可靠性强,因此,在缺相状态下的不对称运行一直为研究的热点。Zhao Yifan等专家根据矢量空间解耦方法推导出断相故障下六相感应电机的数学模型[2],给出了缺相下PWM的调制方法;王永兴等学者研究了六相永磁同步电机缺相的容错控制[3];杨金波等学者提出了一相开路双三相永磁同步电机建模与控制[4];欧阳红林等学者给出了六相永磁同步电机缺相时不对称运行的矢量控制方法[5]。目前,研究的重点都是基于传统的十二开关变换器。在九开关变换器驱动的六相电机中,关于容错控制的研究尚有欠缺。
本文采用矢量空间解耦的方法,建立了F相断路后的双Y移30°永磁同步电机(以下简称PMSM)的数学模型,九开关变换器应用空间矢量脉宽调制(以下简称SVPWM)算法进行容错控制。
1 断相后的SVPWM算法
根据九开关变换器的拓扑结构,每个支路上开关管的通断就必须满足相应的开关约束条件[6]。约束条件有两个:一是同一时刻同一支路上有且只有两个开关管开通,中间开关管的开关信号由上、下两个开关管的开关信号经“异或”运算获得;二是任意时刻支路上的电压VAN和VDN的关系为VAN≥VDN。
九开关变换器AD相支路上3个开关管允许的开关状态及支路电压,如表1所示。其中,Vdc表示直流侧电压大小,VAN和VDN分别表示A点、D点相对于直流侧负极的电压大小。
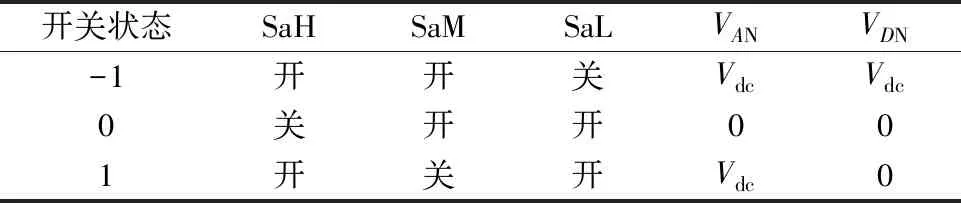
表1 九开关变换器的开关状态
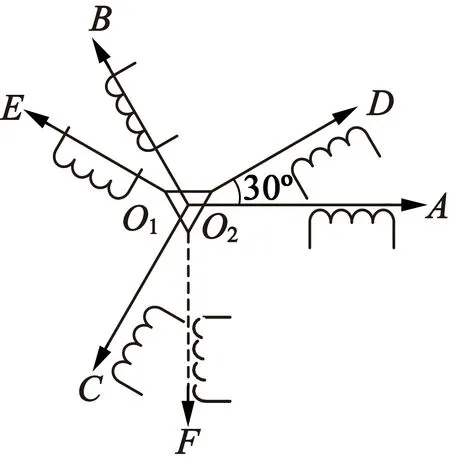
图2 F相断路后的电机绕组模型
根据传统的背靠背十二开关变换器的开关规律以及九开关变换器相应的约束条件,我们可以得出九开关变换器工作时的27种开关模式,如表2所示。
结合表1、表2和图2,可以绘制出当电机发生F相断相故障后,九开关变换器在α-β平面的电压空间矢量图[7],如图3所示。
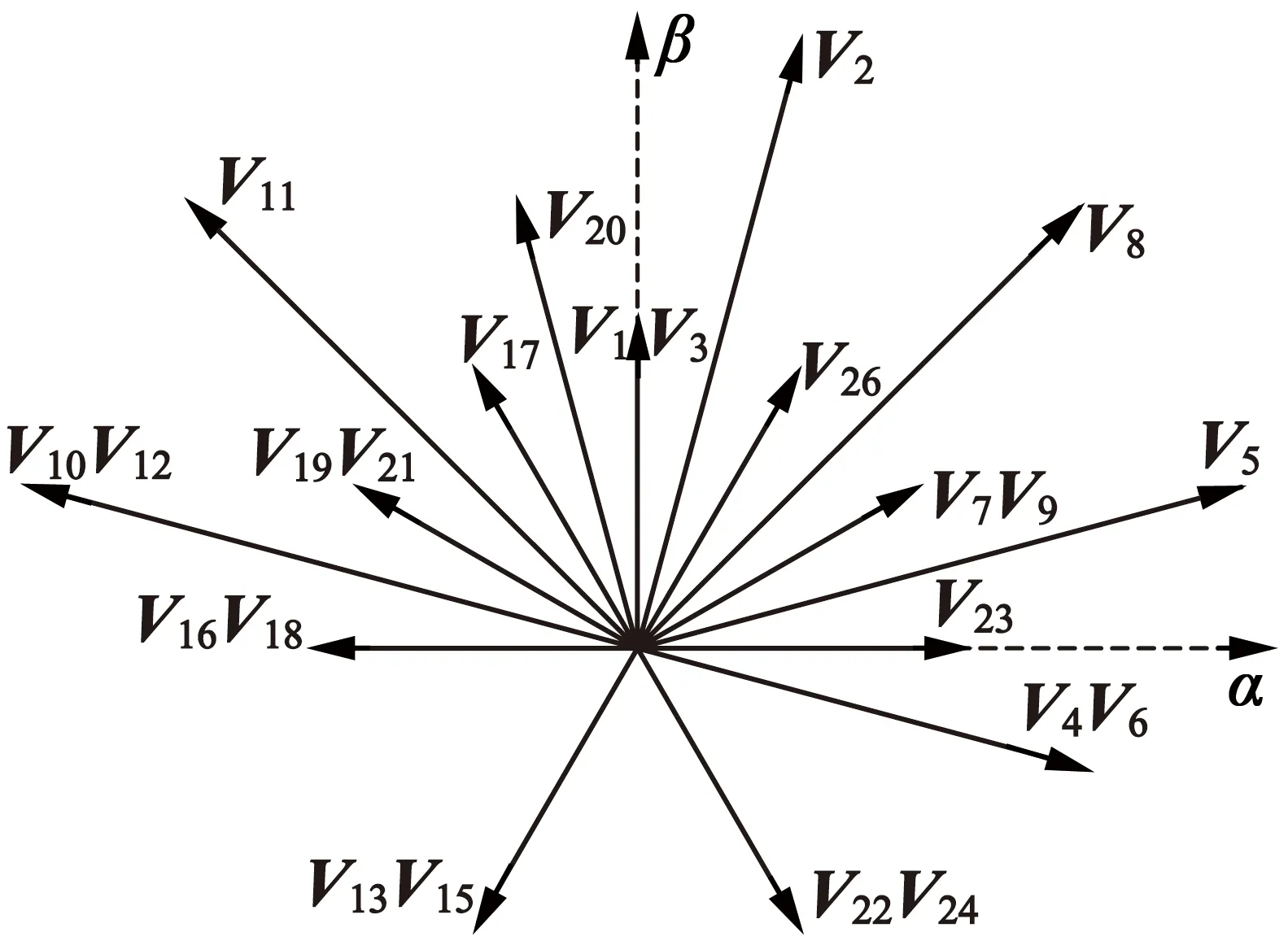
图3 九开关变换器电压空间矢量图
基于九开关变换器的双Y移30°PMSM驱动系统中,SVPWM算法模块是最为重要的,该模块包含4个部分,即扇区判断模块、基础作用时间模块、六相时间比较模块和调制模块。
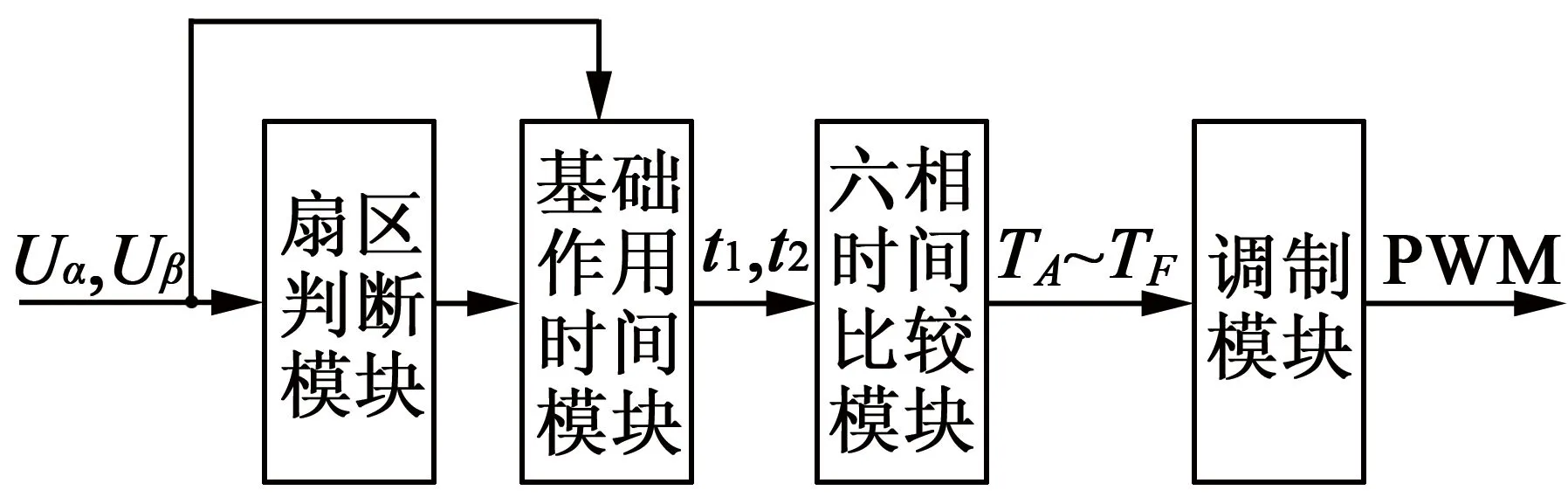
图4 PWM模块流程图
九开关变换器有27种开关状态,采用矢量空间解耦,将27种开关状态矢量投影到3个相互正交的子空间:α-β子空间,z1-z2子空间,o1-o2子空间。机电能量转换主要发生在α-β子空间,因此需在α-β子空间中合成基波电压矢量。当电机发生F相断相故障后,需要在α-β子空间内重新选择电压矢量,将α-β子空间进行扇区划分,如图5所示。
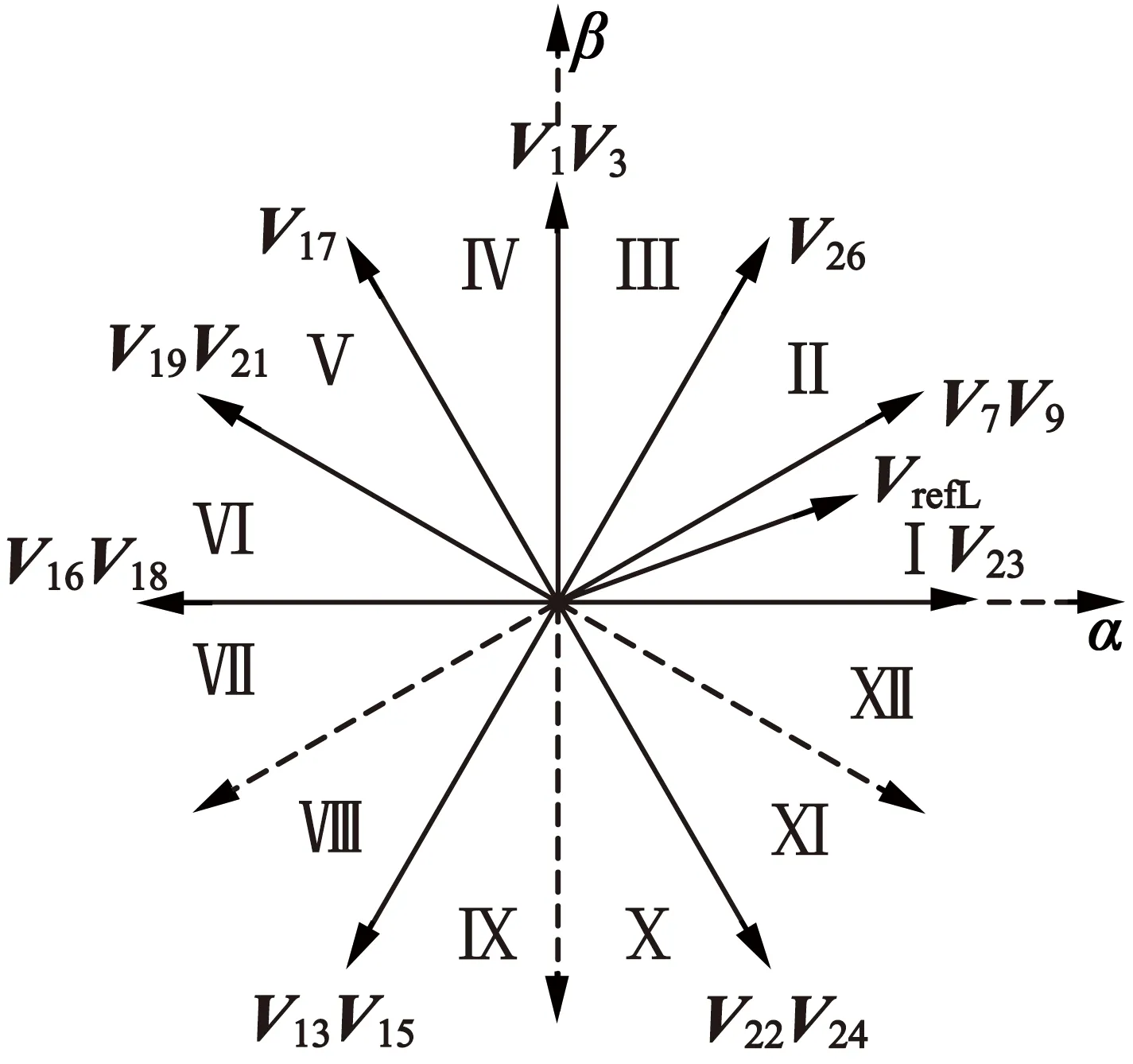
图5 α-β子空间扇区电压矢量图
将三相电机的扇区判断方法应用到双Y移30°PMSM中,经过简单的运算就可以得到Uref所在的扇区,减少了计算过程,提高了系统的响应速度。
因此,要引入A~F,令:

(1)
再令:
式中:sign(x)是符号函数,如果x>0,则sign(x)=1;如果x<0,则sign(x)=0。扇区值与N值关系如表3所示。

表3 扇区值与N值对应关系
将任意扇区相邻的两个基本电压矢量的作用时间分别定义为t1和t2,直接利用正交电压信号Uα和Uβ计算t1和t2。如图6所示,例如当参考电压矢量Uref落在第二扇区内,可以由U9,U26和两个零矢量合成,作用时间分别为t1,t2,t0和t7,根据伏秒平衡原则可以得到各矢量的作用时间。
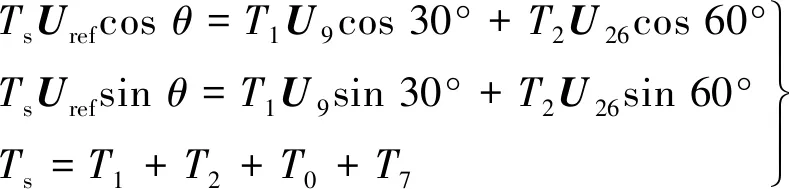
(3)
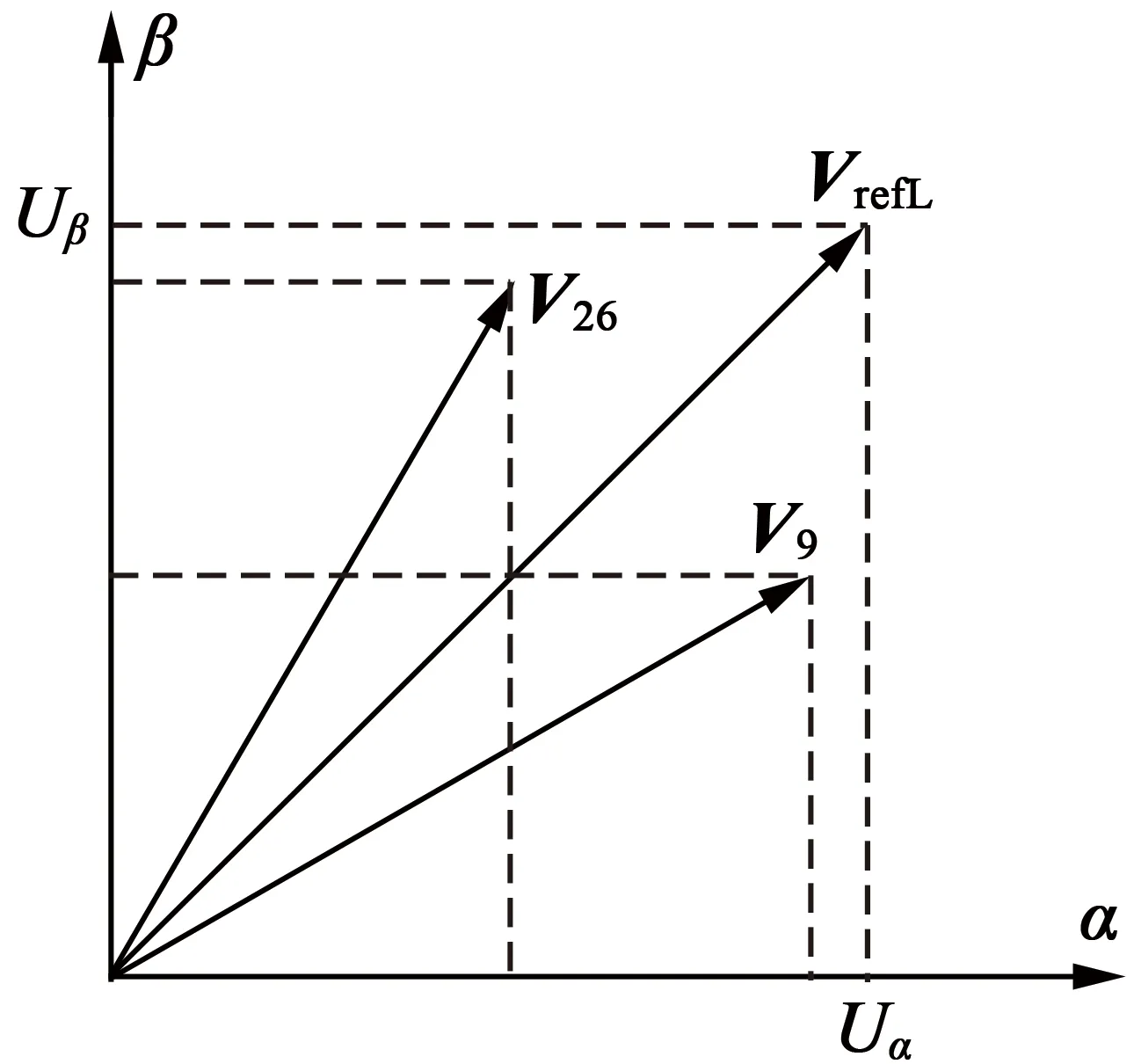
图6 矢量正交分解图
经过扇区作用模块和基础电压矢量作用时间模块得到相应基础作用时间T1和T2后,可以由六相时间比较模块得到不对称六相时间TA~TF,最后与载波相比较得出调制波。
2 单相断路的数学模型
为了简化分析,对双Y移30°PMSM作下列假设:
(1)磁路线性,忽略磁滞及涡流损耗;
(2)不计定子表面齿、槽的影响,转子上无阻尼绕组;
(3)绕组正弦分布;
(4)忽略电机漏感。

图7 电机F相断路后系统图
2.1 变换矩阵的确定
电机在自然坐标系下的电压和磁链方程:

(4)
ψs=LsIs+γsψm
(5)
式中:us,Is,ψs为电机的电压矩阵、电流矩阵、磁链矩阵;Rs,Ls,γs为电机的电阻矩阵、定子电感系数矩阵、磁链系数矩阵;ψm为永磁体在各相绕组产生的磁链幅值。当电机发生F相断路时,将正常六相系数矩阵去掉第六行和第六列,可以得到断相后的系数矩阵。
当F相断路后的静止变换矩阵T5s可以根据矢量空间解耦的方法来确定。
T5s=[αβz1z2z3]
(6)
该矩阵为正交单位矩阵,在机电能量转换子空间上增加三个不涉及机电能量转换的三个子空间。

(7)
电机无故障工作时,各相的电流幅值相等且相位关系与绕组在空间上相差的电角度相同[4]。当电机F相发生断路时,电机运转时变得不对称,两套绕组中线点隔离的连接方式如图7所示。根据公式以及与幅值不变的约束条件,可以得出电机F相断路后的静止变换矩阵[4]。
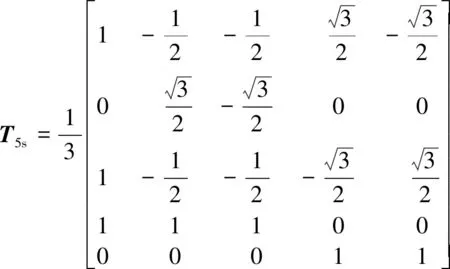
(8)
只有α-β平面进行机电能量转换,所以将其变换到d-q旋转坐标系中,变换矩阵:
T5r=PT5s
(9)
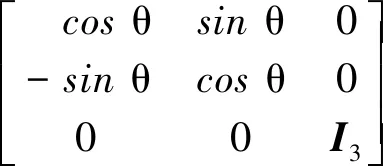
(10)
2.2 矢量空间解耦方程
将式(8)~式(10)分别代入式(4)和式(5)中,可以得到新的电压方程[4]:
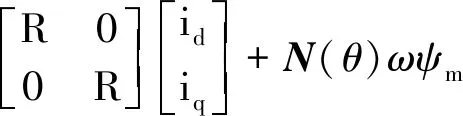
(11)
式中:

(12)
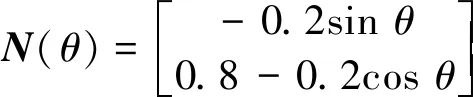
(13)
引入微分算子p,得:
可以得出旋转坐标系中电流与电压的数学关系。
电磁转矩由各相电流和电感、磁链矩阵决定,可以得出:

(15)
化简可得:
Te=3p[(Ld-Lq)idiq+iqψm]
(16)
式中:p表示极对数;id和iq表示旋转坐标系上的d轴和q轴电流。
3 仿真分析
在MATLAB/Simulink中,对本文提到的九开关变换器驱动的双Y移30°PMSM容错控制进行可行性验证,仿真结果如图8所示。
九开关变换器的开关频率为10 kHz,直流母线电压设定为Udc=300 V,双三相PMSM参数:R=0.291 Ω,Ld=Lq=4.586 mH,ψm=0.049 6 Wb,p=2,J=0.052 kg·m2,电机初始给定转速n=100 r/min,负载转矩TL=5 N·m。
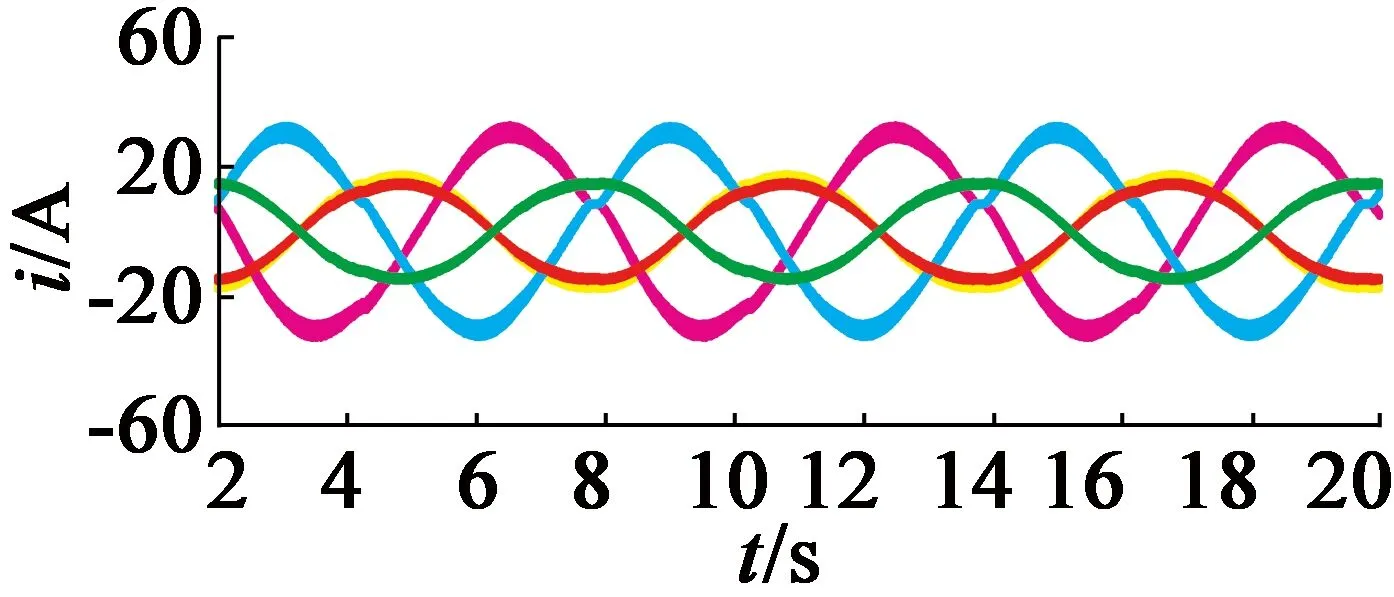
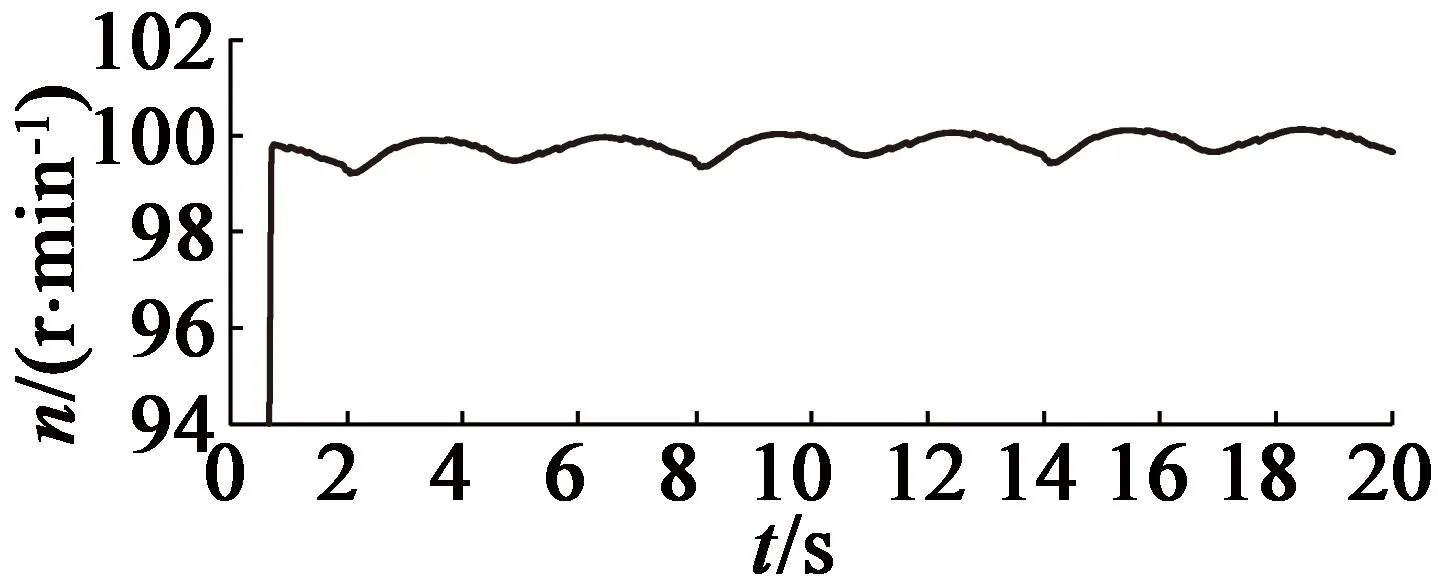
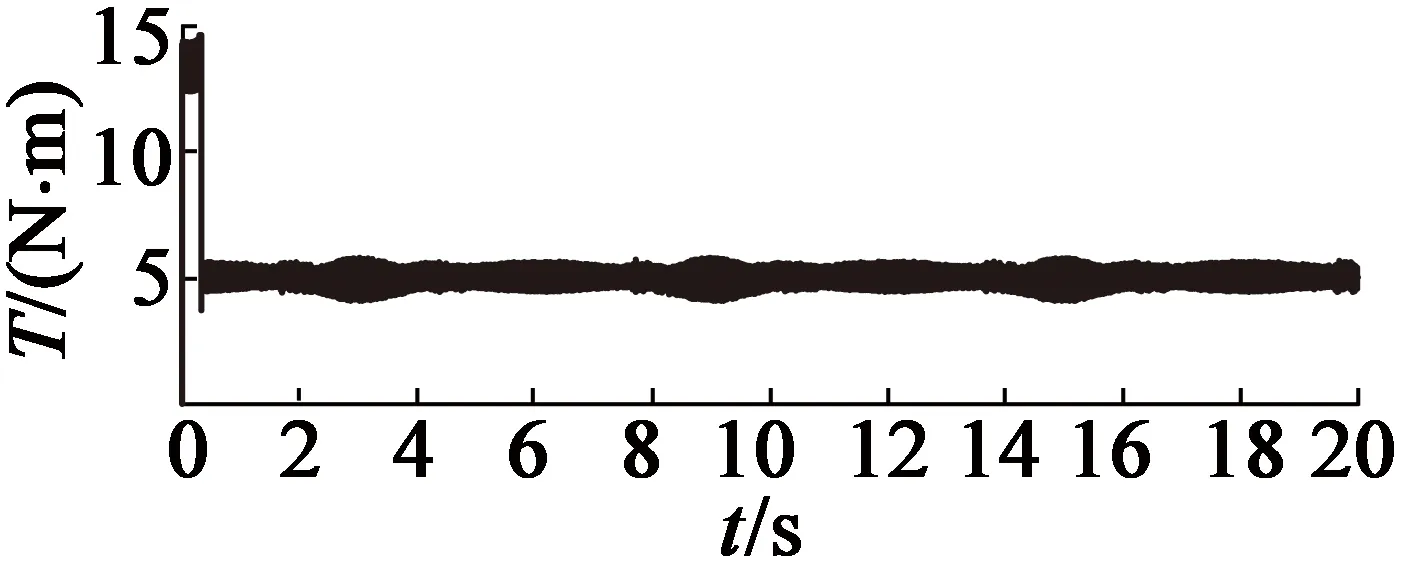
仿真结果如图8所示。图8(a)显示了F相断路,未容错控制时磁链是一个椭圆形轨迹,谐波分量较大;图8(b)显示了F相断相后,未容错控制的电机定子六相电流;图8(c)为F相断相后,未容错控制的转子转速,转速波动比较大;图8(d)显示了F相断相后,未容错控制的电磁转矩,转矩脉动较大,电机不能保持平稳运行;图8(e)显示了F相断相后,容错控制的电机定子六相电流;图8(f)显示了F相断相后,容错控制的转速,与容错控制前相比转速波动较小;图8(g)显示了F相断相后,容错控制的电磁转矩,与容错前相比电磁转矩脉动较小,电机可以保持稳定运行。图8显示的波形结果证明了所提算法的可行性。
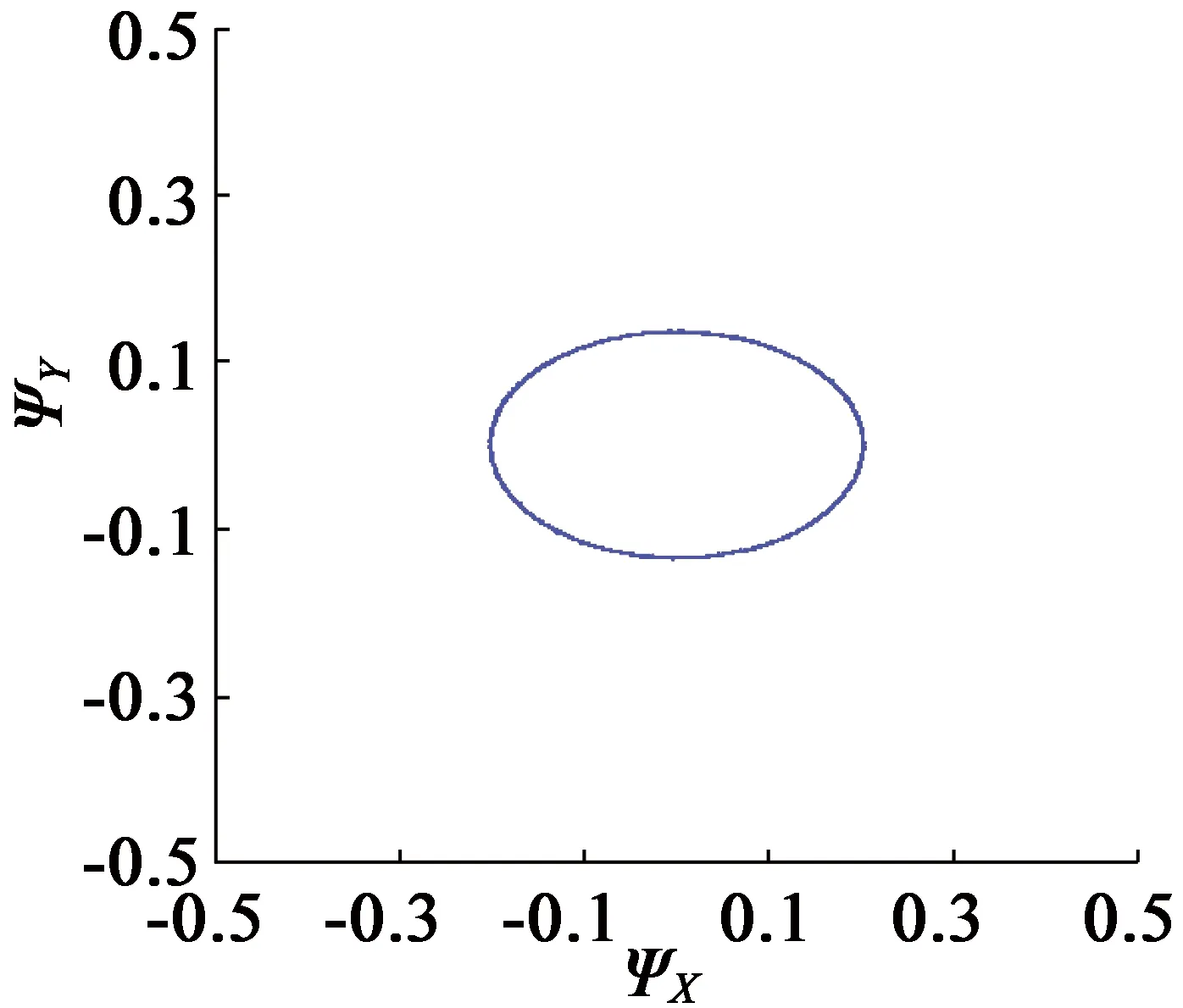
(a) 未容错控制的磁链图
(b) 未容错控制的 电机定子六相电流
(c) 未容错控制的 转子转速
(d) 未容错的 电磁转矩

(e) 容错控制的 电机定子六相电流
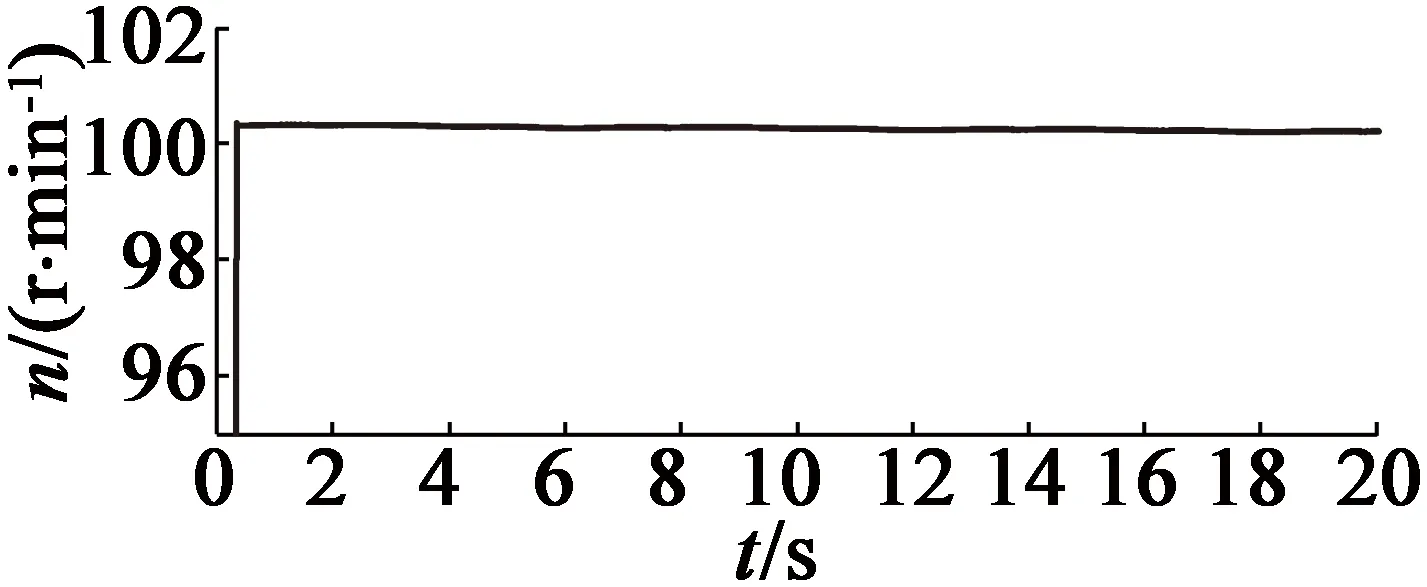
(f) 容错控制的 转速图
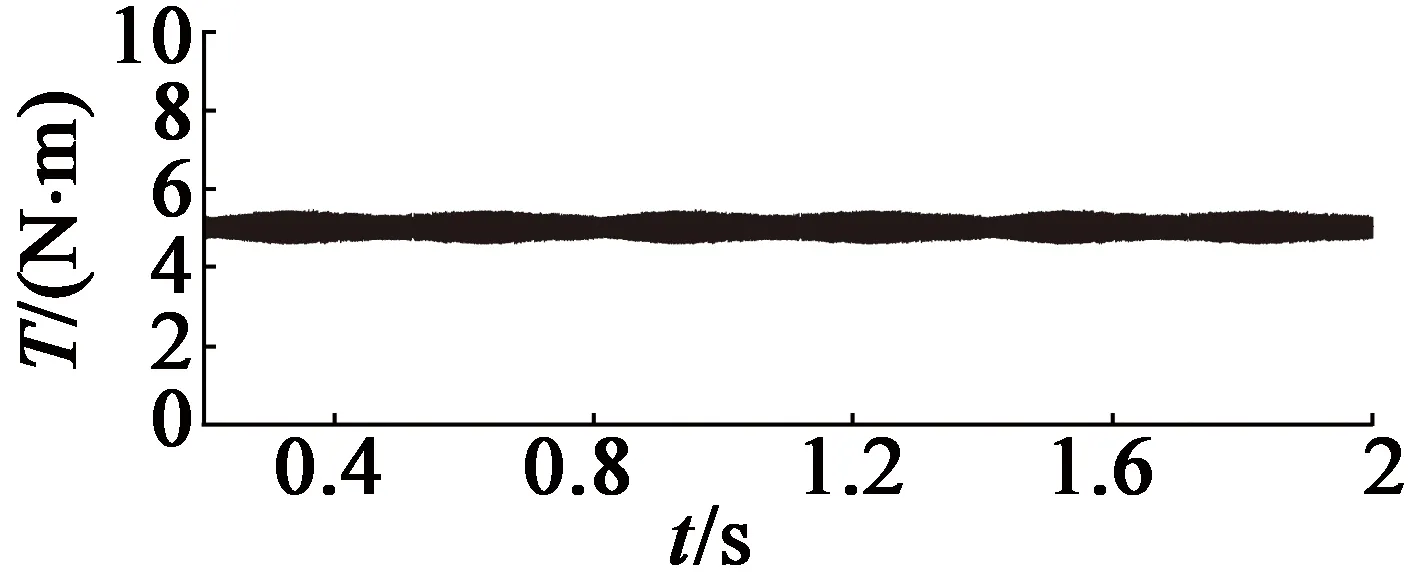
(g) 容控制的错 电磁转矩图图8 F相断相后未容错控制和容错控制的仿真对比
4 结 语
本文对F相断路后的双Y移30°PMSM建立了数学模型,根据九开关变换器的工作原理,应用九开关变换器特有的SVPWM算法,对电机进行了容错控制,并进行了仿真实验。当电机发生单相断路时,应用本文的容错控制策略,电机依然按照指定转速运转,有效减少了断相后的电磁转矩脉动,满足其平稳运行的要求,提高了系统的可靠性。
