轨底月牙伤幻象波的分析及应用
2019-11-20
(株洲时代电子技术有限公司,株洲 412001)
常见的钢轨伤损主要有轨头横向裂纹(核伤)、轨腰纵向水平裂纹、轨腰和轨底的横向垂直裂纹等,对于轨腰和轨底的伤损,钢轨检测车主要通过0°和37.5°超声波进行检测。在钢轨检测车检测的过程中,检测人员通过超声波信号的B扫描数据进行伤损判断。B扫描是根据各个探头接收到的信号,经计算机处理后,按照一定的比例以无数个点绘制而成的,显示的是钢轨纵向的正视图[1]。
检测车B扫描数据是以钢轨踏面入射点为基准的,在声束方向上的对应声程位置显示反射点[2]。但是,由于超声波在钢轨中可能经过多次反射,所以反射点并不代表钢轨在对应声程位置一定有伤损,因此需要对其进行分析计算,判断其为实际伤损回波还是幻象波,以提高伤损识别的准确度。
轨底月牙伤是一种常见伤损,其两侧经常出现幻象波,如果不能被有效识别和区分,则易被误判为伤损。笔者在具备幻象波的条件下,通过轨底月牙伤的B扫描数据对其幻象波进行分析,总结了幻象波的特点及其在伤损判定中的应用。
1 幻象波产生原理
超声波检测时,重复频率是指同步脉冲的频率,即每秒内同步电路指挥发射电路、扫描电路等部分协同工作的次数[3]。若同步脉冲的重复频率过高,第一次触发脉冲所产生的回波尚未完全衰减就开始第二次触发工作,即前一个扫描周期的脉冲进入到下一个扫描周期,这会造成显示屏上出现干扰波[4]。这种干扰波并不是第二扫描周期内实际的伤损回波,因此被称为幻象波。
在检测车高速检测的过程中,检测速度可达80 km·h-1,由于超声波声速远大于车速,所以超声波换能器发射的超声波经前方反射体多次反射后仍可能被该换能器接收。当信号传播时间T大于超声波信号的重复发射周期T0时,接收到的回波刚好能够进入下一周期(或后续n周期)的超声波信号时间闸门范围内[见图1(a)]。检测系统按照回波相对于下一周期初始脉冲的时间T1计算伤损位置,并在B扫描中绘制信号反射点,从而形成幻象波,但在钢轨中对应的实际位置上并无伤损。
当检测速度改变时,发射周期T0发生变化,而信号传播时间T不变,则T1也随速度而变化,同时幻象波在B扫描时的位置也会变化[见图1(b)]。

图1 幻象波产生原理示意
2 轨底月牙伤B扫描数据及分析
轨底月牙伤外观如图2所示。在标定线的B扫图中,轨底月牙伤的附近(50 cm范围内)经常出现37.5°超声反射点(见图3),但此处并未设置人工伤损,所以推测其为幻象波。在多个速度下都出现了类似的反射点,且深度和位置随检测速度变化。
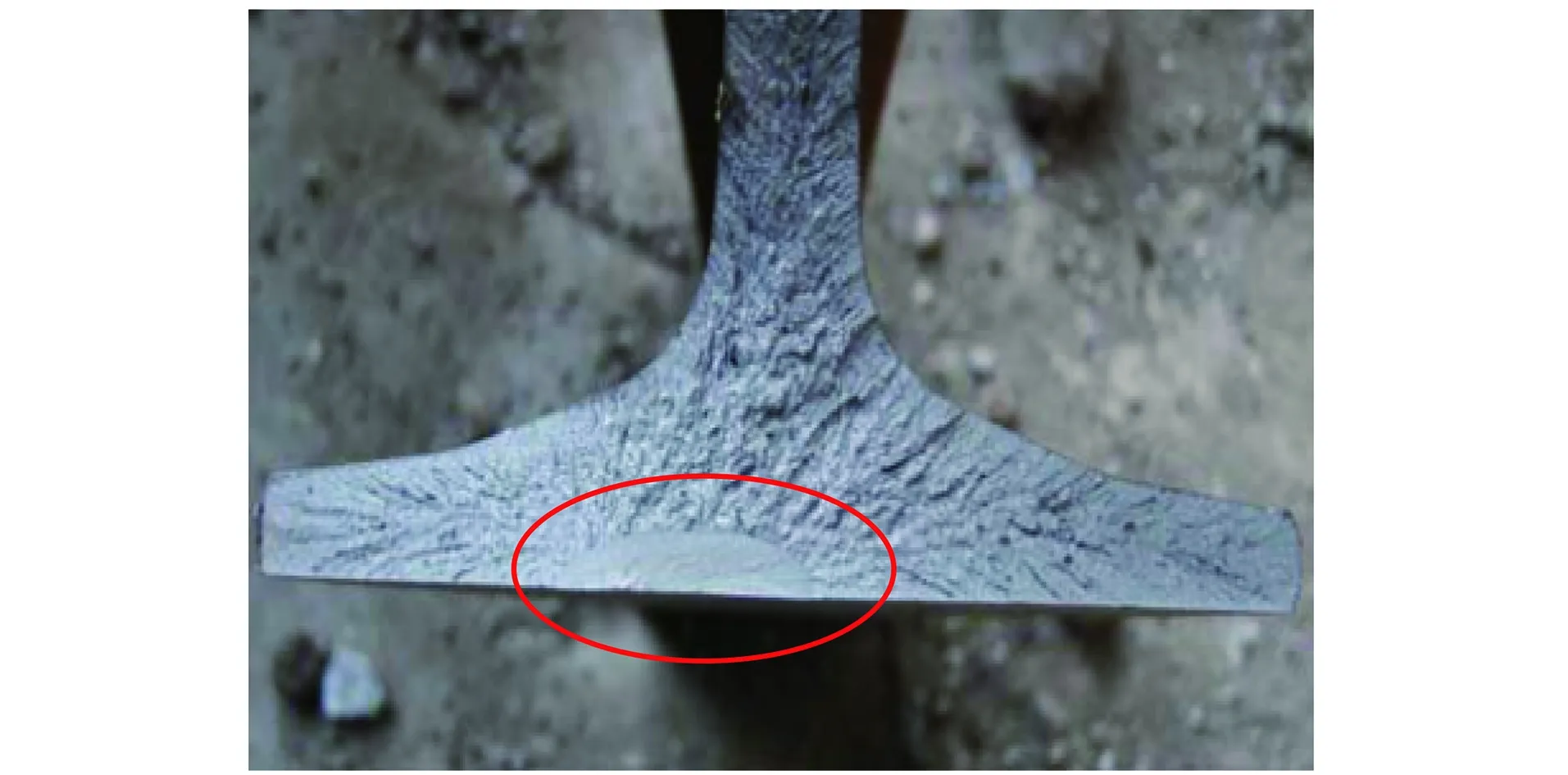
图2 轨底月牙伤外观
2.1 路径分析
由于轨底垂直裂纹存在端角反射,而且轨底月牙伤为较小的垂直裂纹(4~6 mm),所以反射波与入射波波型相同,且平行于入射波。因此,推测其为37.5°换能器发射的超声波在钢轨中经轨底、轨面和轨底月牙伤端角反射后返回,在下一周期闸门内被换能器接收而形成的幻象波。后轮37.5°换能器的超声波传播路径如图4所示,前轮37.5°换能器的超声波传播方向与之相反,原理与之相同。
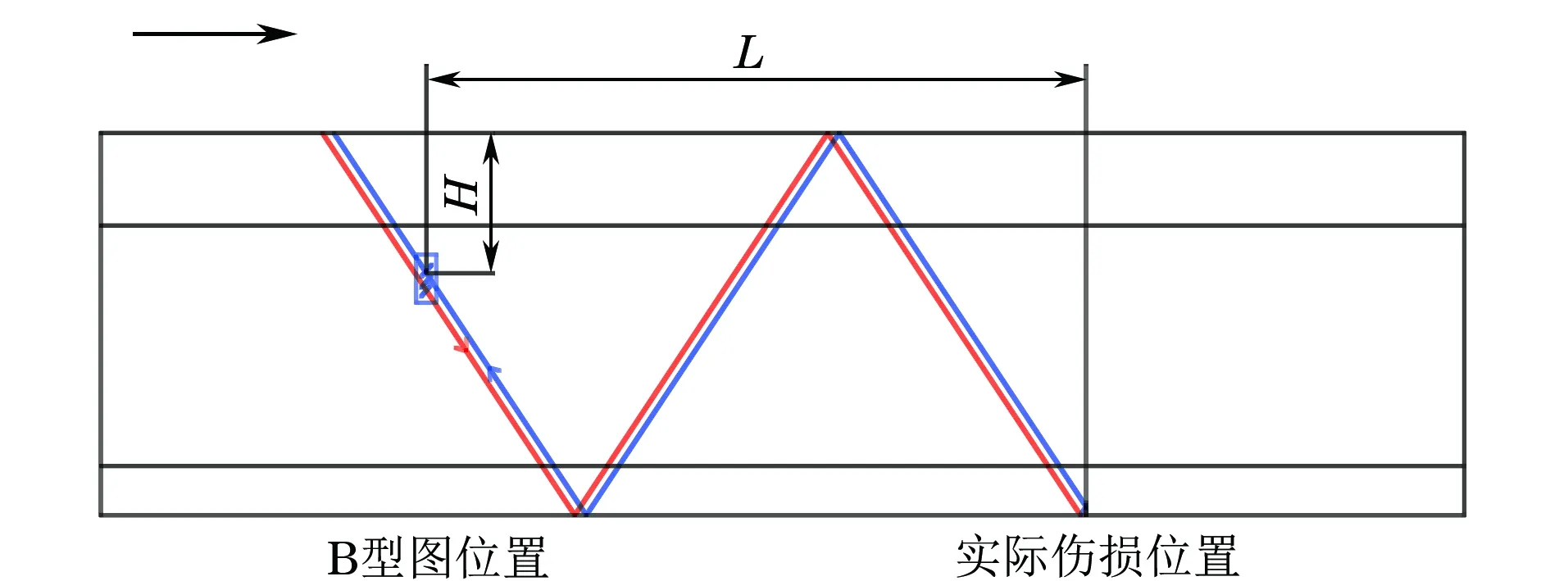
图4 后轮37.5°换能器的超声波传播路径
2.2 声程计算
目前,国内大型钢轨检测车的超声波重复频率随检测速度变化,即在不同的速度模式下,超声波的重复扫查间隔不同[5](见表1)。ΔL为不同速度下超声信号的发射间隔,即检测车一周内移动的距离。由于反射波与入射波路径相近,所以计算时不考虑路径的变化。
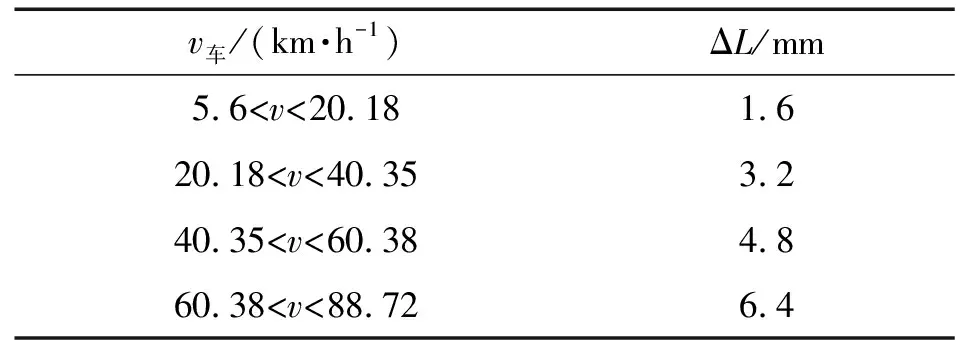
表1 检测车在不同速度下超声波的重复扫查间隔
当检测车检测速度为v车时,发射周期如式(1)所示。
T0=3.6ΔL/v车
(1)
1周期内的超声波的声程如式(2)所示。

(2)
式是:v钢为横波波速。
幻象波与伤损的横向距离如式(3)所示。
(3)
式中:β为超声波在钢轨表面的入射角。
幻象波深度的计算方法如式(4)所示。
H=3H轨-L·cotβ
(4)
式中:60型钢轨高度H轨=176 mm;钢中横波波速v钢=3 240 m·s-1;β=37.0°。
根据标定数据,幻象波与伤损的横向距离理论计算值和实测值对比如表2所示,幻象波深度的理论计算值和实测值对比如表3所示。
比较幻象波的水平位置以及深度的理论计算值与实测值,除个别数据外误差都较小,所以该幻象波的分析结果成立。
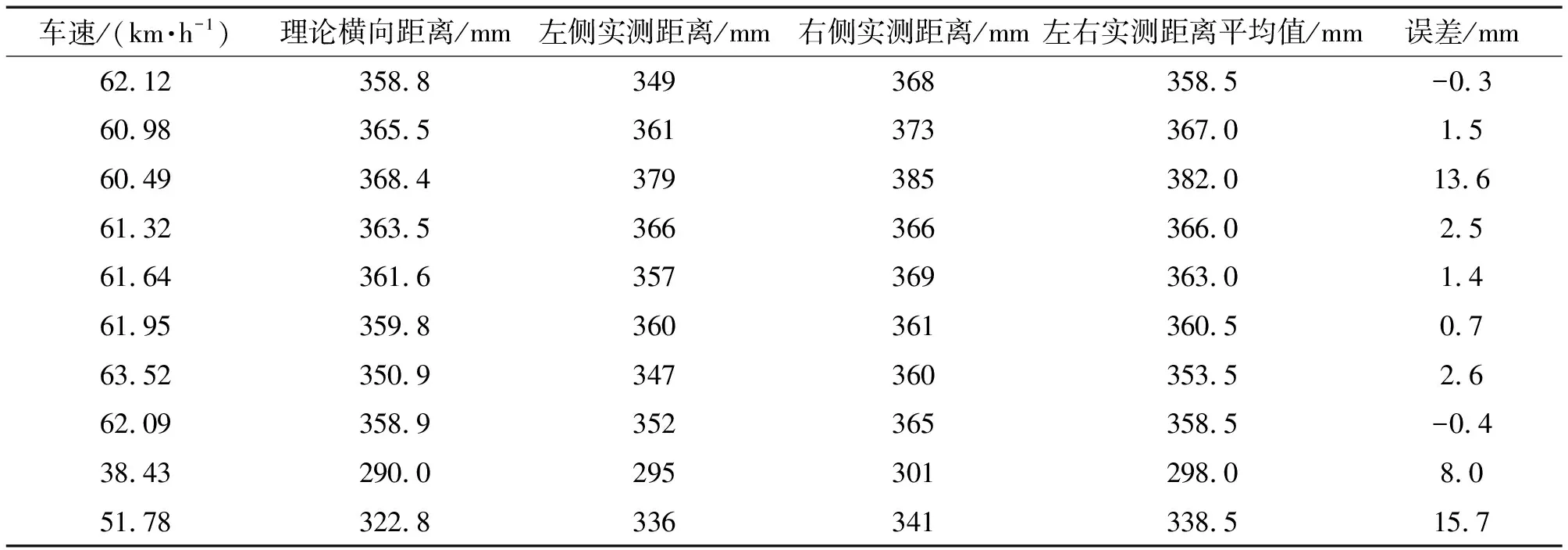
表2 幻象波与伤损的横向距离理论计算值和实测值对比

表3 幻象波深度的理论计算值和实测值对比
2.3 误差分析
幻象波位置的理论计算值与实测值之间的误差产生的主要原因是部分幻象波位于闸门边缘或信号较弱而没有完全显示,导致B扫描图中反射点的中点不在理论位置。而且,经过多次反射后,超声波会发生声束扩散,导致幻象波比实际伤损本体波更大,实测值出现误差。
产生误差因素还有:
(1) 耦合液中的波速、换能器安装角度使用的是理论值,但不同探轮的37.5°换能器的角度有细微差别,不同试验条件下的超声波波速也有差异,不一定与理论值一致。
(2) 高速检测过程中车辆上下摆动,使信号传播时间T发生变化。
3 幻象波的特点
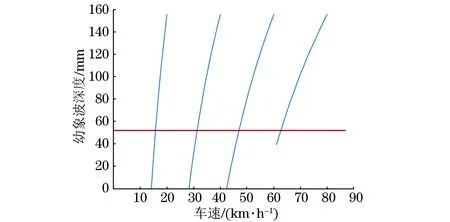
图5 幻象波深度与车速的关系
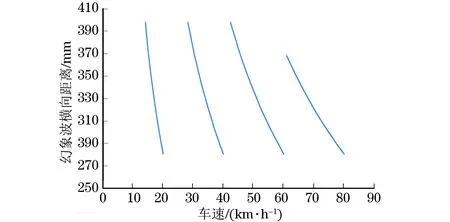
图6 幻象波和伤损的横向距离与车速的关系
计算得到幻象波深度与车速的关系,如图5所示,幻象波与伤损的横向距离如图6所示。幻象波的位置只有在37.5°闸门内才会在B扫描图中显示,37.5°闸门开始位置通常设为40 μs,对应深度为51.75 mm,如图中红色横线所示。因此,能够出现幻象波的速度区间为:[15.6,20.1],[31.3,40.3],[46.9,60.3],[62.6,88.7]。但是,由于传播路径长、衰减严重,即使在这些速度区间内也不一定会出现幻象波。
因此,轨底月牙伤幻象波的特点如下所述。
(1) 只有37.5°超声波回波反射点,回波点群形状类似于轨腰斜裂纹,与轨底伤损平行,垂直于超声波入射方向。
(2) 位置和深度随发射间隔(检测速度)变化而变化。
(3) 一般成对出现,以轨底伤损所在平面为中心呈对称分布。
(4) 一般引起幻象波的轨底月牙伤会被检出,同时产生幻象波。
4 伤损判定中的应用
地铁探伤车在29.14 km·h-1速度下检出的幻象波如图7所示,地铁检测车在29.14 km·h-1的速度下检测到了幻象波,但按照该速度计算得到的幻象波深度和横向距离都与实测值不符,其数据如表4所示。
由于地铁检测车的轮径为840 mm,而国铁80检测车的轮径为915 mm,检测系统是以915 mm轮径为标准设计的。所以当地铁检测车以v的速度运行时,车轮及轮轴上编码器的转速是相同速度国铁检测车的1.089倍,检测系统内部通过编码器信号计算得到的实际速度是1.089v,所以地铁检测车检测到的幻象波位置与1.089倍速度运行的国铁检测车检测到的幻象波位置相同。
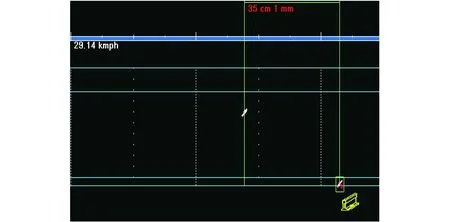
图7 地铁探伤车在29.14 km·h-1速度下检出的幻象波

表4 地铁探伤车数据
因此,应该按照v=31.73 km·h-1的速度计算,此时深度H为61.7 mm,横向距离L为350.8 mm,与实测值相符。
5 结语
幻象波作为一种非缺陷波,对其进行正确地判断能够提高伤损判别的准确度。对于轨底月牙伤,伤损本体有反射且存在幻象波,本体的发射信号可以判伤,但需对幻象波进行准确判断,以减少误报率。所以,灵活和准确地利用幻象波知识,对于检测识别非常有帮助。
通过分析总结,可以为轨底月牙伤的检测识别提供参考依据。随着大型钢轨检测车的发展和充分运用,幻象波的识别(如轨腰、轨底的37.5°幻象波和轨头的70°幻象波等)和相关知识的合理应用在检测中越来越重要。