基于Leica TS60测量机器人的自动放样测量系统开发
2019-11-19朱书敏杨雪峰刘成龙
朱书敏,杨雪峰,王 永,刘成龙
(1.广东省长大公路工程有限公司,广东广州 5114311;2.西南交通大学地球科学与环境工程学院,四川成都 611756;3.西南交通大学高速铁路运营安全空间信息技术国家地方联合工程实验室,四川成都 611756)
放样测量是按照一定的精度要求将桩基、索夹、管线等建筑物或构筑物的设计平面坐标和高程标注在实地的过程。该项工作贯穿于土木工程建设的整个期间,作为工程施工建设的纽带,将各个环节非常紧密地衔接在一起。一旦放样点位置确定后,即可根据放样点位置进行填挖、设备安装、混凝土浇筑等一系列施工工作。如果放样点位置出错或未达到相应的精度要求,即使之后发现了问题也将难以修正,造成极大的经济损失。传统放样测量通常采用全站仪和水准仪等仪器根据放样点设计坐标和高程分别进行测设,人工计算出调整量和调整方向,通过反复地调整和测量直至放样点实测平面坐标和高程均达到设计精度要求。传统放样测量方法过程较为繁琐,并且人工计算容易出现错误,如果不能被及时发现,则会造成不可挽回的严重后果。
现代放样测量需要自动化观测和计算,利用掌上电脑[1](PDA)开发控制测量机器人[2]的测量程序,可以实现放样点自动搜索和精确照准、调整量自动计算、合格放样结果自动保存等多种功能。PDA具有体积小、可靠性高、功能强大、价格便宜、操作简单、适合随身携带、供电时间长等多种优点,非常适合测量人员在野外进行操控和数据结果的实时处理。采用测量机器人在几百米的小范围内进行高程放样测量同样可以达到很高的精度,这也为基于测量机器人进行三维放样测量研究提供了基础。与传统的放样测量方法相比,采用PDA在线控制测量机器人的现代放样测量方法可以较大程度提高放样测量效率且减少人工干预,将繁杂枯燥的计算工作由软件自动完成,从而减轻测量人员的劳动强度并避免错误的发生。因此,本文结合Leica测量机器人二次开发技术[3],基于Leica TS60测量机器人研制了一套适用于二维和三维固定测站和自由设站[4-5]多种测量模式的自动放样测量系统ALS(Automatic Lofting System),下面详细介绍该系统的研制过程。
1 ALS系统
根据现代放样测量自动化、实时化的发展需求和特点,ALS应满足工程施工建设期间多种自动化放样需求。系统应能够控制测量机器人在固定控制点或自由设站点进行放样测量,从而解决工程施工过程中因车辆和临时堆积材料等因素所造成的控制点架站无法直接测定某些点位的视线阻碍问题。并且,根据二维平面放样和三维空间放样的不同需要,自由设站测量设站点和放样点坐标的计算方法也应不同。ALS应实现的具体功能如下:
(1)安装在PDA上的放样测量软件应能够与测量机器人采用串口或蓝牙方式[6]进行通信,通过软件可以方便快捷地对测量机器人进行各项操作控制,例如读取和设置仪器气象参数和测距模式等。
(2)放样测量开始前,软件应能够读取存储在PDA内存中包含控制点和放样点点名和设计坐标信息的文件,同时软件还应允许外业测量过程中临时增加控制点或放样点坐标信息。
(3)放样测量系统应能够实现固定测站和自由设站多种测量模式下二维或三维放样测量。
(4)在设站完成后,应采用极坐标测量方法进行放样测量。为提高放样测量效率,放样测量系统应能够根据放样点和后视点之间的设计坐标位置关系,实现点选某一放样点测量机器人即可自动旋转指向到该点设计位置的功能。
(5)当放样结果满足设计精度要求后,放样测量系统应能够对合格数据进行实时保存,从而保证测量数据安全可靠,避免造成测量数据丢失。
2 ALS系统软件研制
由于放样测量往往不能在同一位置完成,需要经常搬站。因此采用便携式PDA在线控制测量机器人进行自动化放样测量是一种合理的方式。ALS以Leica测量机器人二次开发技术和计算机开发工具和语言[7]为基础,以Leica TS60测量机器人和PDA等硬件为支撑,能够实现多种模式设站、放样点自动照准测量、放样点调整量实时计算、合格放样数据自动保存等功能,下面将详细介绍ALS软件研制的实现过程。
2.1 软件实现流程
ALS软件设计的基本思路为:
(1)设置测量机器人与PDA的通信参数一致以完成联机通信。
(2)设置测量机器人的测距模式和气象参数,并选择相应的设站模式。
(3)将存储在PDA内存中的测量文件建立的后视点和放样点设计坐标信息导入软件。
(4)测量后视点并通过软件自动计算设站点坐标和精度以完成自由设站或固定测站后视定向。
(5)当设站点坐标精度符合要求后,点选某放样点完成放样点自动测量及调整量的实时计算。
(6)将满足放样精度要求的放样点实测坐标自动保存在PDA内存中以便于后续导出查看和管理,ALS软件功能实现流程框图如图1所示。
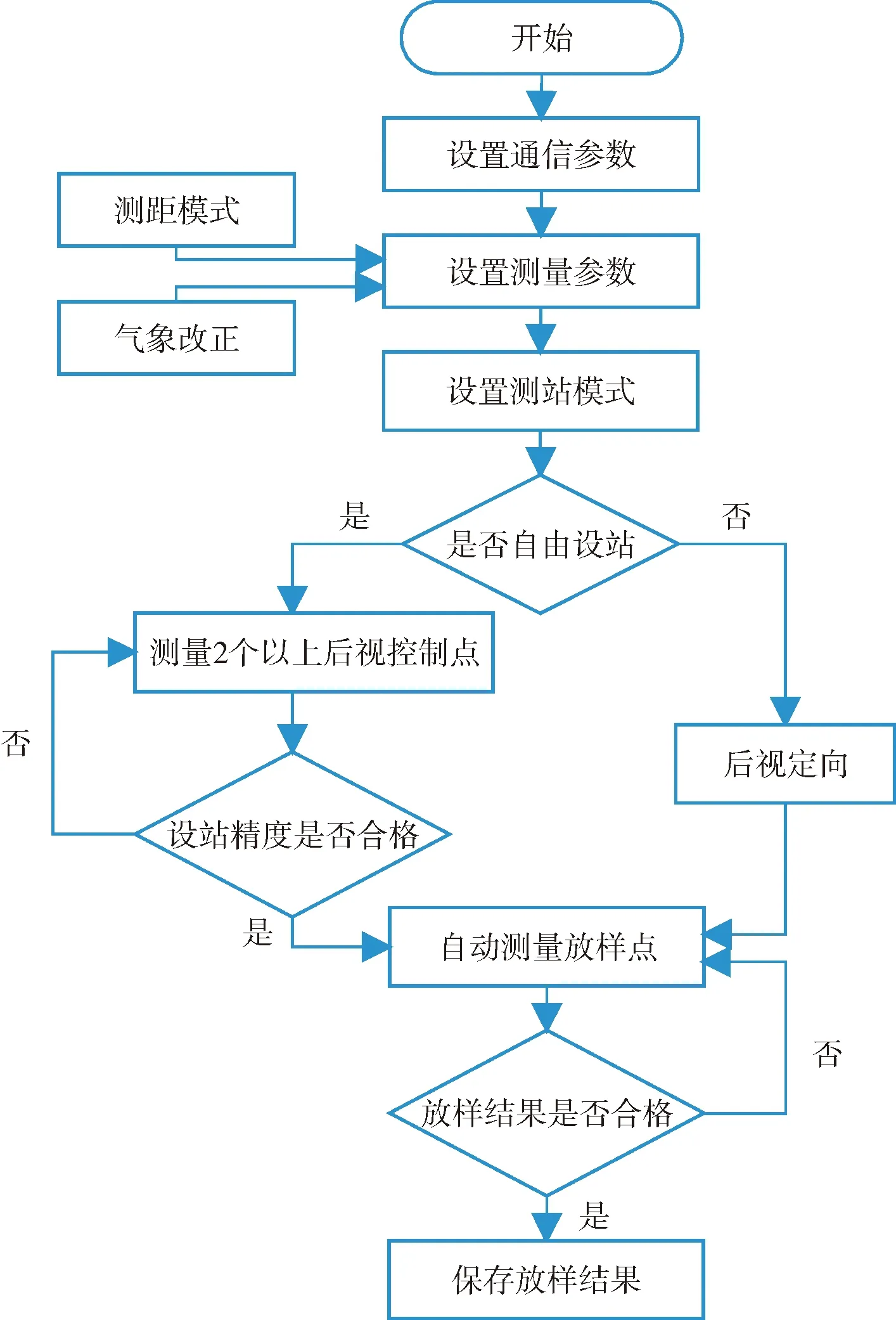
图1 ALS软件功能实现流程
2.2 软件功能设计
依照图1中 ALS软件功能实现流程,并以简便、实用为原则,设计了ALS软件的4个功能模块,分别为参数设置、导入设计、仪器设站、放样测量。
2.2.1 参数设置
设置PDA串口通信参数,如端口名、波特率、数据位、停止位、校验位等与测量机器人一致;设置测量机器人的测距模式和气象参数;选择二维或三维固定测站和自由设站中的一种模式。
2.2.2 导入设计
将存储在PDA内存中由测量文件建立的后视点和放样点设计坐标信息导入软件。同时,软件还允许用户临时增加后视点和放样点设计坐标信息。
2.2.3 仪器设站
固定测站测量模式需首先进行后视定向,即将仪器大致照准某一后视点并进行自动照准测量;自由设站测量模式需观测至少2个以上的后视点以完成自由设站点坐标和精度的平差计算,若设站精度不合格,还应重新架设仪器或观测其他后视点再次进行设站。
2.2.4 放样测量
仪器设站完成后,通过点选某一放样点,软件即可控制测量机器人望远镜自动旋转到该放样点设计位置的方向。测量机器人自动照准并测量该放样点后,软件可以自动计算该放样点实测坐标相对于其设计坐标的调整量。当放样结果满足要求后,可将合格的放样数据保存到PDA内存中,避免传统手工记录容易出错和繁琐的缺点,同时提高放样测量数据处理的工作效率。
2.3 软件功能实现
结合ALS软件实现流程与功能设计,下面介绍ALS软件界面设计和功能模块的编程实现。
2.3.1 参数设置
首先,配置PDA与测量机器人的通信参数一致,从而通过数据电缆或蓝牙方式建立PDA与测量机器人之间的物理连接数据链;然后,读取或设定测量机器人的测距模式和气象参数;最后,选择一种设站模式即完成全部参数设置,参数设置界面如图2所示。
2.3.2 导入设计
在参数设置完成后,即可将后视点和放样点设计坐标信息导入软件。设计坐标信息的导入有两种方式,一种是点击导入按钮,将存储在PDA内存中按照指定格式编辑的设计坐标信息文件直接导入软件;另一种是在增加设计坐标信息的数据录入框中输入需要增加的点名和设计坐标,点击增加按钮逐点逐行地增加设计坐标信息,三维设站导入设计坐标信息界面分别如图3所示。
2.3.3 仪器设站
仪器设站分为固定测站和自由设站两种测量模式,通过点击软件底部标签可以进入相应的设站界面。固定测站测量模式首先应选择测站名和后视点名(三维固定测站测量模式还应在观测后视点之前输入仪器高),然后旋转测量机器人大致照准所选后视点方向,点击测量按钮测量机器人即可完成后视点自动照准和测量,并将观测数据显示在软件中。自由设站测量模式需测量2个以上的后视点进行设站,首先应输入设站名并逐一选择后视点进行观测(三维自由设站测量模式还应在观测后视点之前输入后视点目标高),后视点观测数据显示在软件表格中。当所有后视点观测完成后,点击设站按钮,软件即可自动计算并显示自由设站点约束平差后的坐标和精度。如果设站精度不满足要求,还应重新进行设站。固定测站测量和自由设站测量界面分别如图4、图5所示。
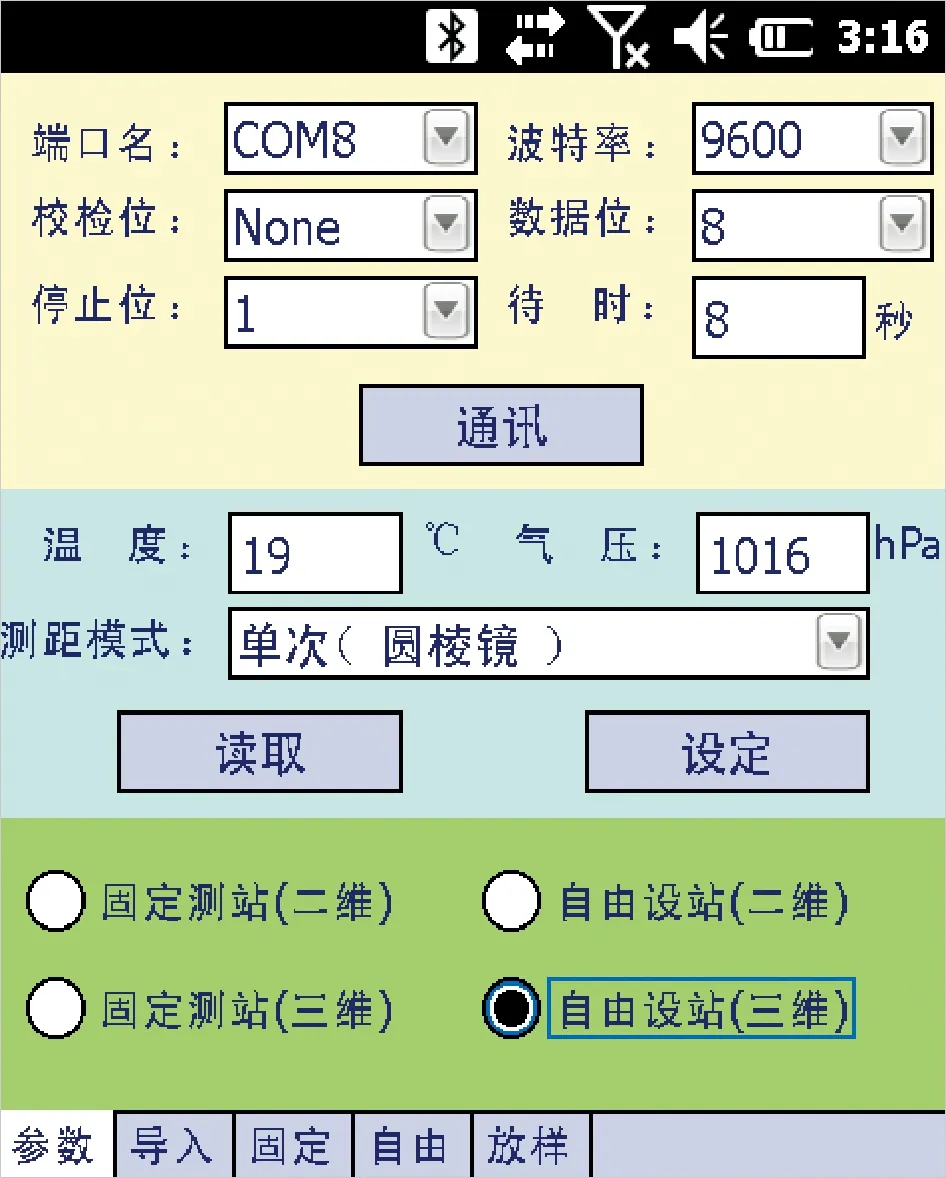
图2 参数设置界面

图3 三维设站导入设计坐标信息界面
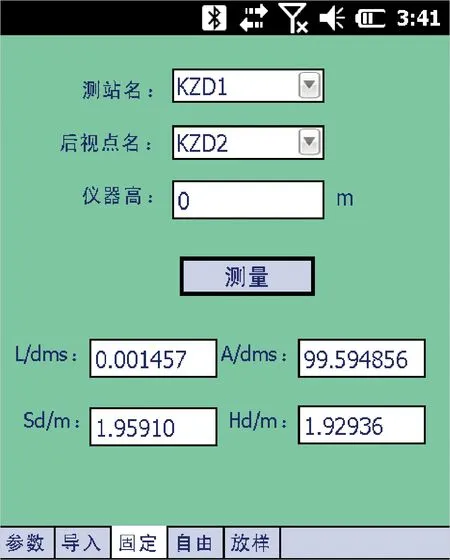
图4 固定测站测量界面

图5 自由设站测量界面
2.3.4 放样测量
在仪器设站完成后,可以开始进行放样测量。选择某一放样点名,测量机器人望远镜即可自动旋转到该放样点设计位置方向。点击测量按钮(三维放样还应输入放样点目标高),测量机器人自动照准测量该放样点并将放样点实测坐标和调整量计算结果显示在软件中。当放样点实测坐标满足要求后,点击保存按钮,即可将放样点实测坐标和调整量的最终结果以文本形式保存在PDA内存中。放样测量界面和放样结果文件格式分别如图6、表1所示。
3 主要结论
(1)本文首先根据现代放样测量自动化、实时化的发展需求和特点,分析了自动放样测量系统应满足的工程施工建设期间的自动化放样需求,并提出了放样测量系统应实现的具体功能。
(2)结合放样测量系统应实现的具体功能和相关算法研制了安装在PDA上的自动放样测量软件,实现了多种模式设站、放样点自动照准测量、放样点调整量实时计算、合格放样数据自动保存等功能。

图6 放样测量界面

点名X/mY/mZ/mΔX/mmΔY/mmΔZ/mmFYD1-1.710613.44971-0.547000.29-0.090.10
(3)通过比较不同模式下放样测量软件计算的自由设站点和放样点坐标与控制点已知坐标之间的差异,验证了自动放样测量系统运行的可靠性及软件计算的正确性。
本文研制的自动放样测量系统(ALS)在虎门二桥桩基施工放样和东、西两个高大索塔各个节段的施工放样测量中进行了实际应用,证明了该系统放样结果正确,运行可靠,而且测站位置选择灵活,放样效率高,值得在土木工程施工放样测量中推广使用,同时本文对同类系统的开发具有借鉴作用。
