直流微网中级联变换器改进滑模控制策略
2019-11-18于少娟
薄 雨,于少娟
(太原科技大学 电子信息工程学院,太原 030024)
随着新能源发电技术不断发展,微网作为整合分布式能源、储能装置、负荷的有效方式受到了研究人员的广泛关注。光伏发电过程简单、没有地域限制,适用范围广,输出直流电,可以直接为直流负荷供电,减少电能转化的环节,实现能量的高效利用。直流微网已经在住宅用电、电动汽车、偏远地区的供电等领域中获得了不断的发展。直流分布式电力系统通常包含大量串联的电力电子变换器,电源、负荷等需要通过变换器的调节实现预期的控制目标,以满足它们的电能质量和电压等级要求,对于电源侧变换器来说,可以将闭环控制的负载侧变换器与负荷整体看作是一个恒功率负荷(CPL),它具有的负阻抗特性会降低整个系统的有效阻尼,影响其稳定运行[1-2]。
目前,已经有多种方法用于解决CPL引起的不稳定问题。文献[3]分析了传统PI控制下级联系统的不稳定性,并提出了一种将PI控制与高通滤波器结合的控制方法,但其中涉及很多参数,参数取值不同会对控制效果产生影响。文献[4]提出了基于存储单元的虚拟阻抗补偿方法,为系统设计了PID控制器,有效提高了系统的稳定性。文献[5]采用非线性干扰观测器来估计负载功率变化,作为前馈补偿以提高输出电压调节的精度。文献[6]对多种CPL补偿技术进行分析比较,指出非线性的滑模控制技术在系统参数不确定或遇到扰动时能很好的保证系统的稳定性。文献[7-8]设计了非线性滑模面,仿真结果表明非线性滑模面在响应速度、电压调节方面都优于线性滑模面。但是,传统的滑模控制中,不连续的高频切换的控制信号会引起抖振问题,导致变换器的输出电压波动较大。在设计控制器时引入趋近律,可以有效的抑制抖振。文献[9]针对永磁同步电机控制系统设计了快速幂次趋近律,在幂次趋近律的基础上加入变指数项,使整个系统具有较好的收敛特性。文献[10]提出了一种多幂次趋近律,用李雅普诺夫函数证明了它的稳定性,并在实际的控制系统中验证了它的有效性。
本文针对直流微网中的级联变换器在受到干扰时易产生的不稳定问题,为级联连接的两个变换器设计了滑模控制方法。根据建立的数学模型,选择合适的滑模面,采用PWM控制解决其频率不固定的问题,减弱抖振现象;在设计控制器时引入多幂次趋近律,加快趋近速度,进一步减弱抖振。仿真结果验证了这一方法可以有效的调节输出电压以解决负载变化引起的问题,相比于传统的滑模控制方法,具有更快的响应速度和更小的抖振。
1 系统结构及建模
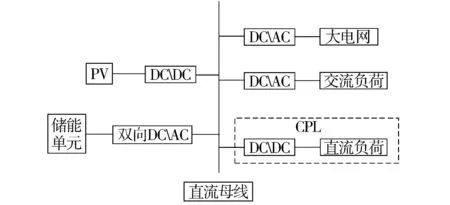
图1 简单的直流微网系统Fig.1 A simplified DC microgrid system
图1为包含了不同电源和负载的直流微网的简单系统。发电单元通常经过升压变换器连接到直流母线上,储能装置根据电源和负荷的功率大小选择工作在充电或放电状态来平抑微网内的功率波动。电路中的直流负荷可以直接接在直流母线上,也可以通过变换器连接,后者的情况较多[3]。电源输出的电压通过源侧变换器升高为直流母线电压,再经负载侧变换器转换为不同形式、不同大小的电压,以满足负荷的电压要求。闭环控制的负载侧变换器可以被视为一个恒功率负荷,所需的功率由前级变换器提供,其V-I曲线如下:

图2 CPL的电压电流特性(V-I)曲线Fig.2 V-I characteristics of a typical CPL
Boost和Buck变换器级联系统的拓扑结构如图3(a)所示,对Boost变换器进行分析时,将与其级联的变换器与负载一同等效为一个恒流源,如图3(b),根据基尔霍夫电流定律,系统的状态方程可以表示为:
(1)
(2)
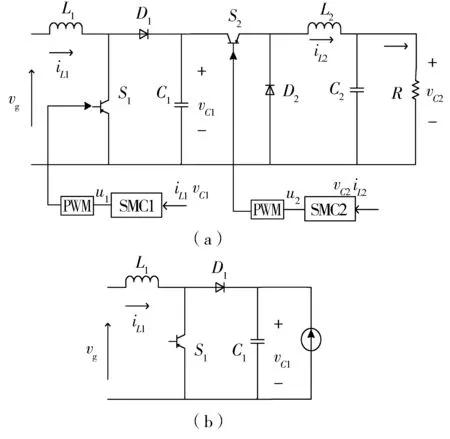
图3 级联系统的控制结构框图Fig.3 Cascade connection of boost and buck converters
负载侧Buck变换器的状态方程为:
(3)
(4)
其中,u1、u2的取值为1或0,分别表示Boost、Buck变换器中开关管的导通或关断。
对带有CPL的Boost变换器整体稳定性进行分析,其传递函数为[7]:
(5)
特征根满足式(6)的关系:
(6)
两特征根λ1、λ2的实部都为正,即系统有右半平面的特征根,不满足稳定性条件,因此,开环控制下整个系统由于CPL的存在而变得不稳定。需要设计合适的控制方法提高其稳定性。
2 基于多幂次趋近律的滑模控制方法
滑模控制鲁棒性好,有很好的抗干扰能力,工程实现简单,相比与PI控制响应速度较快,可以应用在非线性的级联系统中来保持系统的稳定性。滑模运动包括两个过程,首先,系统从任意的初始位置向滑模面运动,到达滑模面后,再沿着滑模面运动到系统的平衡点。本文分别针对两级变换器设计控制方法,将系统状态变量的值送入到滑模控制器中,根据选择的滑模面和趋近律,计算得到相应的控制方程u,将u经过PWM调制加在开关管上调整占空比,严格的调节输出电压,减轻CPL的影响。
2.1 多幂次趋近律
传统滑模控制的最大问题是存在抖振现象,易引起变换器的输出电压波动[11-12],无法保证负荷的供电质量和整个系统的稳定运行,并增加了损耗,使输入输出滤波器的设计复杂化。同时,传统的控制只是要求系统状态最终到达滑模面,但没有对趋近的过程做要求,为了保证这一过程中的动态品质,向滑模控制中引入趋近律,指数趋近律可以实现快速趋近,快速响应,已被广泛使用,但因为其中包含有常数项,在消除抖振方面不是很理想。为了能进一步的消除抖振、缩短响应时间,本文采用了一种多幂次趋近律的方法,方程如式(7)所示:
(7)
式中的系数ξ1、ξ2、ξ3、ξ4均大于0,设α>1、0<β<1,γ的取值由下式决定:

(8)

根据李雅普诺夫(Lyapunov)稳定性理论对多幂次趋近律进行分析,取Lyapunov函数:

(9)
(10)
因此,这一趋近律是存在、可达的,系统状态s可以到达平衡点s=0.
2.2 滑模控制器的设计
对于前级的Boost变换器,选择包含电感电流iL1、输出电压vC1两个状态变量的非线性滑模面[8]
s=vC1iL1-vref1iref1+k(vC1-vref1)
(11)
其中,iref1、vref1分别为电感电流和输出电压的参考值,k为滑模面系数。
根据开关管的不同状态,变换器会处于不同的工作模式,开关函数为:
(12)
为了确保系统能在滑动面上运动到平衡点,必须满足存在条件,即:
(13)
对式(8)求导,并带入状态方程,得到:
(14)
存在下面两种情况:

(15)
(16)
将上面两式结合,得:
(17)
参数k的设计必须满足上述条件。

(18)
ueq即为控制器的等效控制信号,该值是连续的,介于0和1之间。
对于后级的Buck变换器,滑模面方程如下:
s2(x)=k1x1+k2x2+k3x3
(19)
控制器的设计过程与Boost变换器相同。
3 仿真分析
为了对本文改进的控制方法的有效性进行验证,在MATLAB/simulink中搭建了Boost、Buck级联的系统(如图3)的模型。仿真参数如下:输入电压vg=200 V,输出参考电压vref1=350 V、vref2=60 V,电感值L1、L2分别为1 mH、0.01 mH,电容值C1、C2分别为10 μF、100 μF.
趋近律中的系数分别为:ξ1=0.9、ξ2=0.7、ξ3=1.5、ξ4=1.0,α=1.8、β=0.5.
仿真结果及分析如下:

图4 Boost变换器输出电压波形Fig.4 Output voltage of Boost converter
图4中的a、b分别为传统和新型滑模控制下Boost变换器输出电压的波形。从图中可以看出,图a中系统需要2.5 ms才能到达稳态,并存在超调;图b中系统响应的时间为1.5 ms左右,缩短了到达稳态的时间,没有出现超调现象,将电压波形放大,如图5,新型趋近律控制下的电压波形的波动比较小。

图5 Boost变换器输出电压波形Fig.5 Output voltage of Boost converter
图6是两种控制方法下,系统状态变量iL1、vC1的轨迹图,由图可知,基于多幂次趋近律的滑模控制中的抖振明显减小了。

图6 系统状态变量的运动轨迹Fig.6 State variable locus diagram of system
为了验证系统受到外界干扰时的稳定性,设计在0.2 s时负荷变小,图7为级联系统中各变换器输出电压、电感电流的仿真图。

图7 负荷变小时级联系统中各变量的波形图Fig.7 Waveform plots of various variables incascaded system with reduced load
从图中可以看出,0.2 s时,电路中的负载阻值减小,两变换器的电感电流都有所增加,输出电压在短时间发生了下降,但很快回到稳定状态,两个控制器都实现了控制目标,整个系统具有较好的鲁棒性,Boost变换器的输出功率增加(如图8)以适应负荷功率需求。
图9中,Boost变换器输入的电压值在0.2 s时从200 V增加到250 V,输出电压的值能迅速回到稳定状态,维持系统稳定运行,由于负荷所需功率不变,电流也保持不变。

图8 Boost变换器输出功率波形Fig.8 Output Power of boost Converter
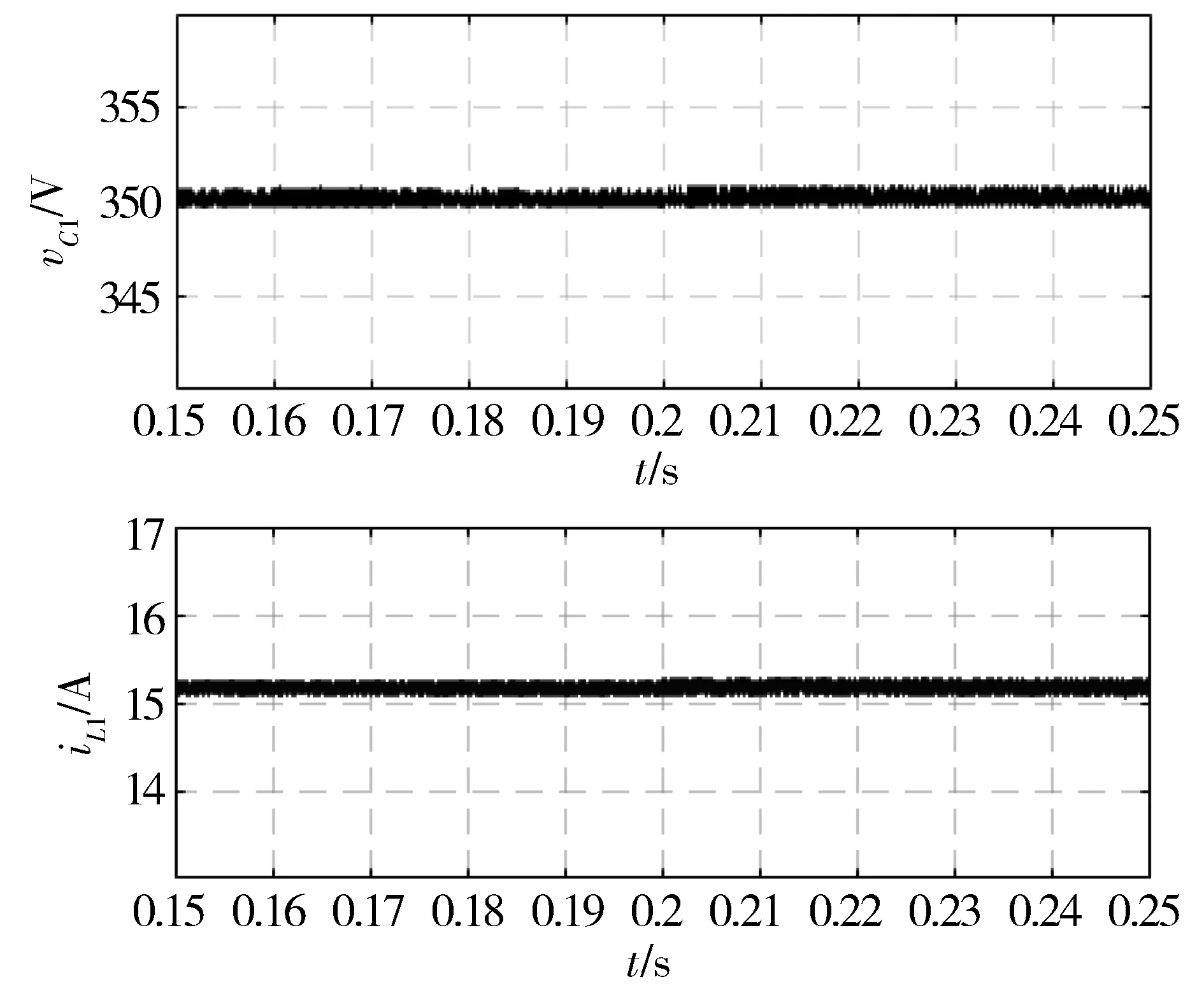
图9 输入电压变化时Boost变换器各变量的波形Fig.9 The waveform of each variable of theboost converter when the input voltage changes
4 结论
直流微网中,级联的变换器具有较强的非线性,受到外界干扰时输出电压以发生波动,针对传统的PI控制无法保证级联系统稳定运行的现象,选择了非线性的滑模控制方法维持系统稳定,引入多幂次的趋近律可以使系统在运动的过程中根据距离滑模面的远近实时调整趋近速度,缩短系统的响应时间,减小滑模运动存在的抖振现象,从而减小变换器输出端口的电压波动,保证良好的供电质量。加入PWM调制解决由于系统的频率不固定引起的抖振问题。仿真结果表明,所提出的控制方案实现了级联系统输出电压的稳定控制,在电源电压和负载需求发生变化时,系统可以快速的回到稳定状态,具有很好的鲁棒性。