基于GAPSO-MUSIC 算法的矢量水听器的DOA 估计
2019-11-13姚建丽胡红萍白艳萍王建中
姚建丽,胡红萍,白艳萍,王建中,李 薇
(中北大学理学院,山西 太原 030051)
20 世纪50 年代矢量水听器被人们所研究,它的出现有效的改善了声压水听器的缺点:声压水听器接收的声场信息不够完全[1].波达方向估计作为一个重要的研究方向,它所受到的关注度自然不言而喻.对波达方向的估计是空间谱估计研究的主要课题,而在20 世纪70 年代以来,获得了大量关于空间谱估计的研究成果,其中多重分类算法(Multiple Signal Classification,MUSIC)就是其中典型的代表.
MUSIC 算法在1979 年被Schmidt 等人提出,1986年又被重新发表[2],在此基础上,人们又对MUSIC 算法作出了一系列的改进.Rao 和Hai[3]在1989 年提出了ROOT-MUSIC 算法,用求多项式的方法进行DOA估计.邹燕明等[4]在1999 年提出了将多生境排挤机制算法运用到MUSIC 算法的谱峰搜索过程中.蔡晶晶等[5]针对二维波达方向估计时运算量大的问题,提出了一种基于降维二维MUSIC 算法(RD-2D-MUSIC)的无需联合搜索与配对的估计方法.周豪等[6]提出了基于萤火虫算法的改进的MUSIC 算法(GSOIMUSIC),它是针对经典MUSIC 算法在低空多径干扰情况下,由于角度估计不准确和运算量大提出的.张义元等[7]在2015 年针对2D-MUSIC-DOA 估计时,谱估计函数为多峰函数并且计算量较大的一些问题,提出了将2D-MUSIC 算法和布谷鸟算法(CS)进行结合,然后进行DOA 估计.刘影等[8]在2015 年提出采用改进的杂草算法来优化MUSIC 算法,由于改进的杂草算法更方便搜索解空间的整体区域,从而能够得到全局最优解.冯舒[9]在2016 年提出了将蝙蝠算法运用到阵列信号的DOA 估计中,文章分别将蝙蝠算法用来优化ML 算法、OMP 算法和MUSIC 算法.本文对矢量水听器的阵列信号的协方差矩阵进行特征分解,构造MUSIC 算法的谱函数,并用此函数作为GAPSO 算法的适应度函数,从而提高了DOA 估计的精度.
1 阵列信号模型
本文收集的信号都是具有一定规律的信号,采用均匀阵列进行讨论,如图1 所示.

图1 DOA 估计的一般模型(均匀线性)Fig.1 General model of DOA estimation(uniform linearity)
假设 N 个远场窄带信号的角度为{ θ1, θ2,...,θN},入射到M 元阵列,则阵列的接受信号为

式中,Z(t)是阵列的输出矢量,S(t)信号矢量,N(t)是高斯白噪声矢量,A(θ)是矢量水听器的方向矢量矩阵.

式中,a(θk)=[1,e-jβk,e-j2βk,...,e-j(M-1)βk]是第k 个信号的声压响应系数,为阵元与阵元之间的距离,λ 为频率最大的信号的波长,uk=[1,cosθk,sinθk]T为第k 个信号的方向矢量,⊗为克罗内克积符号.
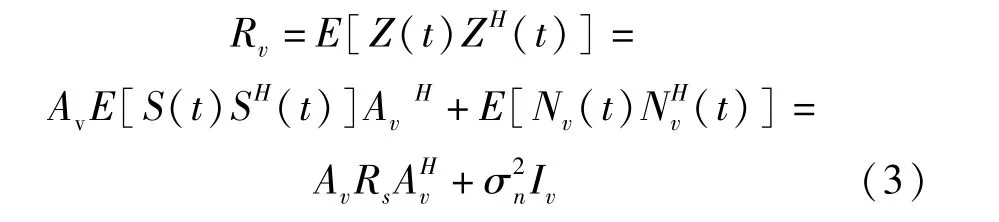
得到其协方差矩阵为:
2 遗传粒子群算法与MUSIC 算法结合
2.1 遗传粒子群算法(GAPSO)
粒子群(Particle Swarm Optimization,PSO)算法在1995 年提出,由Eberhart 和Kennedy 等根据对鸟类捕食行为的研究而发现的一种群优化算法[10].遗传算法(Genetic Algorithm,GA)是20 世纪70 年代提出,J.Holland 教授模拟遗传学和自然的优胜劣汰的进化过程所得到的[11-12].这两种算法都是根据群体提出的优化算法,但两者有它们的不同之处:PSO 算法计算简单,参数少收敛速度快,但容易陷入局部最优;GA 算法则需要大量的时间做过多的冗余计算,交叉变异算子增加了种群的多样性,增强了全局寻优能力,减少早熟现象的发生.因此,本文采用两种算法结合使用,将遗传算法中的交叉和变异思想应用到粒子群算法中,得到一个性能更好的GAPSO 算法[13-15].
GAPSO 算法在谱峰搜索时的具体步骤:
1)初始化迭代次数Gmax=200,粒子的数目sizepop=20.
2)粒子的位置、速度的更新公式为:
式中w 是惯性权重;k 为当前的迭代次数;c1,c2是正的学习因子;r1,r2为0 ~1 之间的数为粒子i 在的个体极值的位置;gbestk为群体在的全局最优的位置.
3)对粒子进行适应度值计算,进行排序选择优秀个体代替遗传算法的选择过程.
4)用遗传算法中交叉算子进行更新.取交叉概率为0.8.
5)用遗传算法中变异算子进行更新.取变异概率为0.2.
6)是否结束:再次迭代,看是否超过最大迭代次数.如果达到最大迭代次数,则结束,输出结果;否则,转2)继续执行.
7)结束,输出结果.
2.2 MUSIC 算法
MUSIC 算法是利用信号子空间和噪声子空间的正交性得到的.首先通过信号的协方差矩阵经过特征分解得到信号和噪声子空间,根据信号和噪声两个子空间之间的相互正交性构造MUSIC 谱函数,利用谱峰搜索,峰值所对应的位置为信号的波达方向角.
阵列信号的协方差矩阵为:

对协方差矩阵Rv进行特征分解,得到特征值和特征向量,并对特征值降序排列:

其中,Σs=diag(λ1,λ2,...,λK),Σn=diag(λK+1,λK+2,...,λ4K),Us是前大K 个特征值对应的特征向量形成的信号子空间,有Us=[e1,e2,...,eK],e1,e2,...,eK是信号子空间的特征向量;Un是4M-K 个特征值对应特征向量形成的噪声子空间,有Un=eK+1,eK+2,...,e4M,eK+1,eK+2,...,e4M是噪声子空间的特征向量.
由于信号的方向矢量av(θ)形成的空间和信号子空间Us相同,因此方向矢量av(θ)和噪声子空间Un正交,即

矢量阵列的MUSIC 谱函数为:

在实际情况下,收集的数据是一定的,利用最大似然估计得到的协方差矩阵为

由于实际环境中收集的数据含有噪声,因此av(θ)与Un不能完全正交,寻找信号源方向的方法采取最小优化搜索的方式进行,即

则实际的矢量阵列MUSIC 算法的谱函数为


2.3 GAPSO-MUSIC 算法
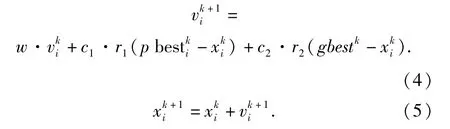
将GAPSO 算法同MUSIC 算法相结合,即将MUSIC 算法的谱函数p (θ )作为GAPSO 算法的目标函
图2 基于GAPSO-MUSIC 的阵列信号的DOA 估计流程图Fig.2 DOA estimation flow chart of array signal based on GAPSO-MUSIC
3 仿真测试
3.1 实验一基于单信源情况下的波达方向估计
本次实验的环境选择为5 元均匀线阵,仿真信号采用一个正弦信号,取快拍数500,信噪比为10dB,对实验进行200 次Monte-Carlo 仿真测试.运行100 次实验,对所得数据进行分析.
本文分别利用PSO-MUSIC,GA-MUSIC,GAPSO-MUSIC 三种模型对单信号源的DOA 进行估计,得到单信号源的DOA 估计适应度曲线图和误差图,如图3 所示.
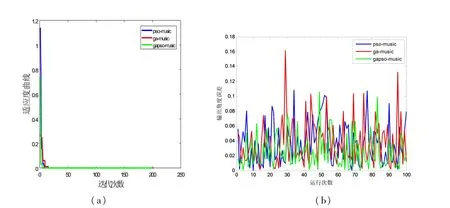
图3 信号源的DOA 估计(a)适应度曲线;(b)误差图Fig.3 The DOA estimation of the signal source(a)fitness curve;(b)error diagram
图3(a)中PSO-MUSIC 模型的适应度曲线用蓝色曲线表示;GA-MUSIC 模型的适应度曲线用红色曲线表示;GAPSO-MUSIC 模型的适应度曲线用绿色曲线表示.从图中可以看出,本文提出的GAPSOMUSI 模型具有最快的收敛速度.图3(b)为PSOMUSIC、GA-MUSIC 和GAPSO-MUSIC 三种模型的DOA 估计误差图,从图中可以看出,GAPSO-MUSIC有更小的角度误差.
三种网络模型运行100 次的信号源DOA 预测值与实际值之间的MAE、MSE、MAPE、和RMSE 四种评价指标结果如表1 所示.
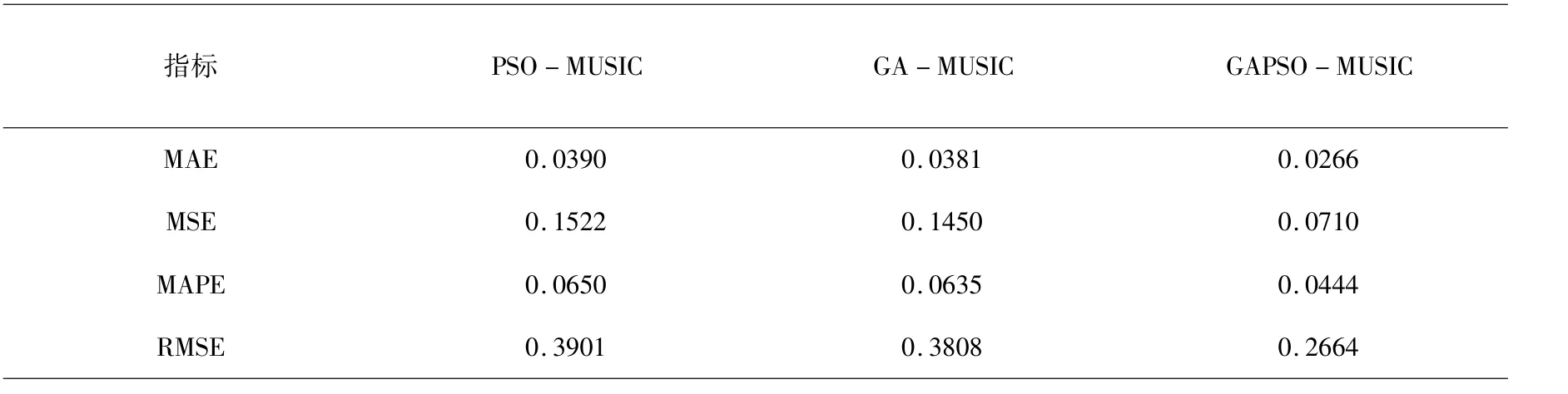
表1 三种模型预测结果的MAE,MSE,MAPE,RMSE 的指标结果Table 1 Results of MAE,MSE,MAPE,and RMSE for the prediction results of the three models
表1 中是三种模型下的MAE,MSE,MAPE,RMSE值,可以看出:在这种三种模型中,GAPSO-MUSIC 的MAE、MSE、MAPE、RMSE 值是里面最低的,表示它的性能是最好的.PSO-MUSIC 在这三种模型中的值是相对最高的,性能最差.因此,本文提出的GAPSOMUSIC 具有更好的估计精度,有很好的适用性.
3.2 实验二 基于不同模型在不同信噪比下的分析
实验二的仿真条件实在实验一的仿真条件相同,信噪比分别选取-10dB,-5dB,0dB,5dB,10dB,15dB,20dB,并计算在其情况下的均方根误差.均方根误差公式为:

其中,yn为第n 次实际情况的输出值,为第n次的仿真实验的输出值.
三种情况不同信噪比的信号源DOA 预测值与实际值之间的RMSE 值结果如表2 所示.

表2 三种模型不同信噪比下的均方根误差Table 2 Root mean square error of different models with different signal-to-noise ratios
表2 为三种模型在不同信噪比下的RMSE 值.通过表2 可以得出:信噪比低的RMSE 值较高,信噪比高的RMSE 值低.在这三种算法中,PSO-MUSIC 的均方根误差是最高的,GAPSO-MUSIC 的均方根误差时最低的.因此,本文提出的方法GAPSO-MUSIC 具有更好的估计精度.
4 湖试实验
4.1 数据来源
在实际的应用过程中,对汾河二库(如图4 所示)做了湖试实验.汾河二库位于山西省太原市西北方向30 公里处,它的平均水深约为40m,最深的位置处达到50m,水域面积广阔,非常符合声场测试的环境.本次测试采用基阵船和信号船来执行,将三元MEMS 矢量水听器的均匀矩阵固定于基阵船的一侧,阵元间距d 为0.5m,放置在水下10m 的位置.发射换能器则固定在信号船上,同样的放置在水下10m 的位置处,两船相距40m.

图4 MEMS 矢量水听器均匀线阵(图中圈出水听器位置)Fig.4 uniform linear array of MEMS vector hydrophone(circled by the hydrophone in the figure)
4.2 对于实际数据的DOA 估计
实验的过程中,对固定点的声源进行测向.信号船在基阵船90°方位发射800Hz 的正弦信号.三种网络模型运行100 次的信号源DOA 预测值与实际值之间的MAE、MSE、MAPE、和RMSE 四种评价指标结果如表3 所示.

表3 三种模型预测结果的MAE,MSE,MAPE,RMSE 的指标结果Table 3 Results of MAE,MSE,MAPE,and RMSE for the prediction results of the three models
表3 为实际数据的MAE、MSE、MAPE 和RMSE值.从表中可以看出,本文提出GAPSO-MUSIC 的MAE、MAPE 和RMSE 值在这三个模型中最低的.因此,我们提出的方法GAPSO-MUSIC 对于DOA 估计有一定的优势,估计精度更高.
5 结论
本文针对MUSIC 算法搜索能力复杂,计算量大以及粒子群算法易于早熟,容易陷入局部最优等缺点,提出了GAPSO-MUSIC 算法用来估计波达方向角.文中建立三个模型进行对比:PSO-MUSIC、GAMUSIC、GAPSO-MUSIC,通过仿真实验和湖试实验可以看出:GAPSO-MUSIC 明显优于PSO-MUSIC 和GA-MUSIC,具有更高的估计精度.通过湖试实验,可以看出本文所提出方法在矢量水听器的DOA 估计方面有很强的实际价值.