一种太赫兹高分辨鉴相测速的方法
2019-11-12于巍巍
何 静, 肖 建, 倪 亮, 于巍巍, 丁 霞
(上海无线电设备研究所,上海201109)
0 引言
太赫兹波段位于微波和红外之间,兼有毫米波与红外两个区域的特性。相对微波波段,太赫兹雷达容易实现窄的探测波束,并具有大的多普勒频移,有利于实现高分辨测速[1-2]。目前,国内太赫兹雷达系统仍处于起步阶段,硬件系统不成熟、系统非线性等因素直接影响雷达探测性能。将传统的雷达测速方法应用在太赫兹波段,存在两个问题。首先,高精度太赫兹雷达系统幅相补偿算法实现困难[3-4]。太赫兹雷达系统带宽大,系统非线性带来的目标回波幅相误差难以精确补偿,影响雷达测量精度[5]。其次,测速分辨率受限于测量周期及积累时间,雷达测速分辨率受限于测量周期及积累时间,无法兼顾高分辨和快速性。
文中介绍了一种通过测量相邻中频回波的相位差的实现高精度速度测量方法,避开了复杂的幅相补偿问题,并可以快速实现对目标速度的高分辨测量。
1 太赫兹雷达系统非线性误差
现有的太赫兹频率源功率较低,单个频率源产生的信号难以同时驱动发射链路和接收链路。如果两个频率源各自驱动,则会带来相位不同步的问题,导致系统非相参。基于双源驱动的太赫兹相干雷达系统实现框图如图1所示,先将两个频率源输出的非相干信号进行混频,得到差信号,再与回波信号的中频信号混频,将非相干相位噪声抵消掉,实现相干检测[6]。
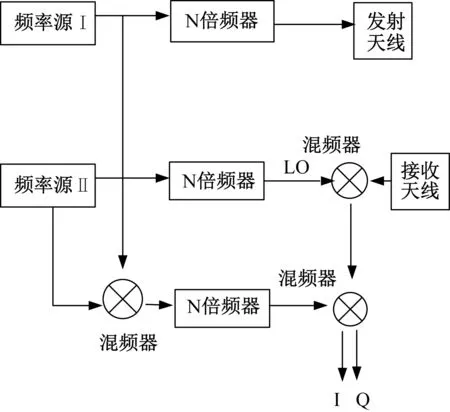
图1 太赫兹雷达框图
由于倍频数较大,系统的相位非线性误差较大,如果不进行补偿直接进行信号处理,会在一定程度上降低雷达测量精度。
2 非线性误差对雷达测量精度影响
对于调频体制的太赫兹雷达,发射信号为

式中:A(t)为幅度函数;fc为载频;K为调频斜率;ξ(t)为相位误差函数。
回波信号和LO信号混频后得到中频回波信号,中频回波信号描述如式(2)所示,非线性系统下不同目标形成的回波如图2所示。
如图2所示,由于系统非线性引起回波相位误差较大,导致一维距离像扩散,从而降低了雷达的测量精度。目前,无论是基于参考点的相位误差补偿,还是基于自适应算法的相位误差补偿在实际应用中均受到较大的限制。当回波Ⅰ与回波Ⅱ的距离无限小,则回波Ⅰ与回波Ⅱ的相位差就趋向于一定值,如下图所示。因此通过鉴相的方法可以避开了复杂的幅相补偿问题,并实现对目标速度的测量。
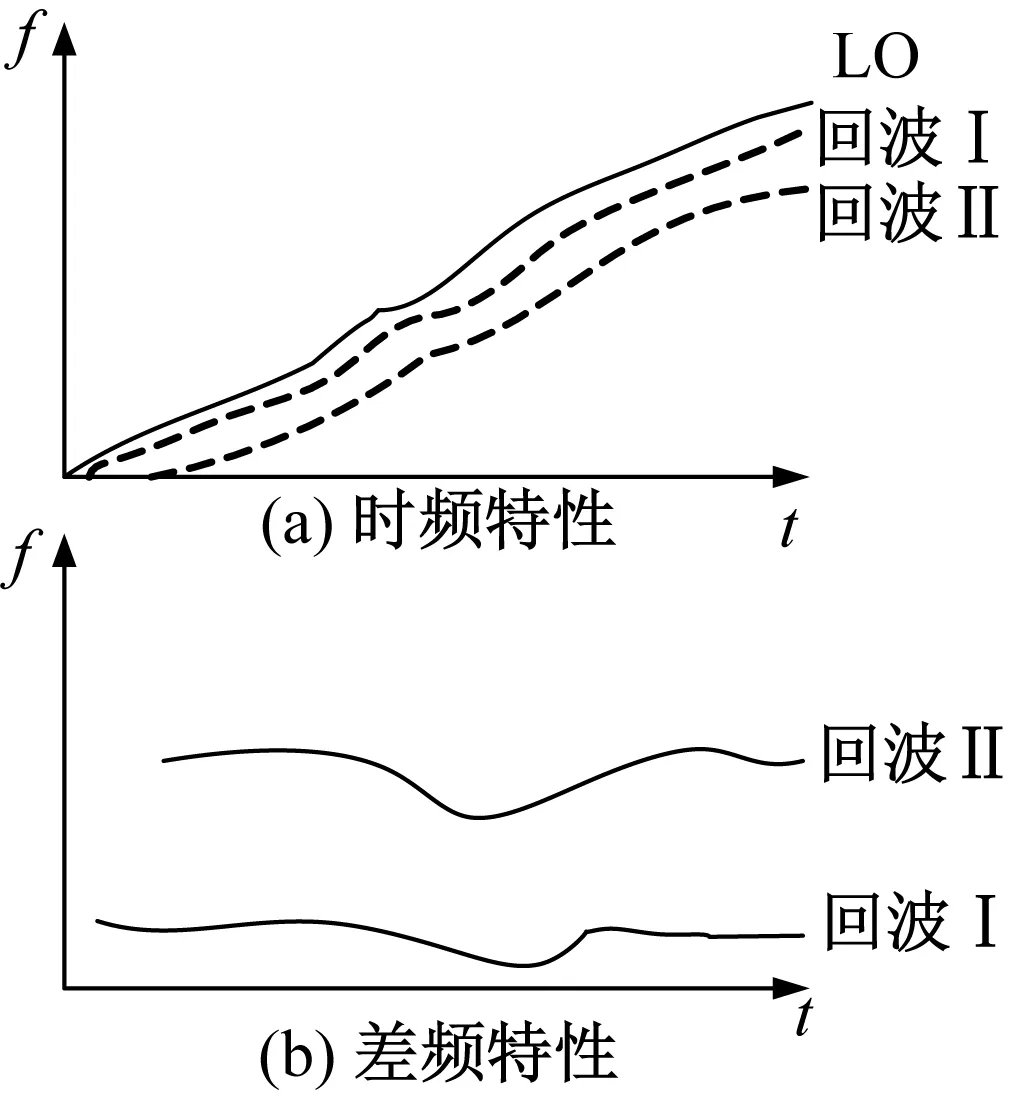
图2 双目标回波示意图
3 鉴相测速原理
雷达发射信号遇到运动目标后被反射回来,回波信号会发生多普勒频移,对于线性调频体制雷达,其发射信号数学表达式为
式中:i为脉冲序号;Tr为脉冲重复周期;Tp为脉冲宽度;fM为雷达中频频率;fL为雷达本振频率;B为线性调频带宽;k为调频斜率。太赫兹雷达发射信号各脉冲初始相位相同,遇到运动目标,反射回来的信号为
式中:τ为目标回波延时;Tpr为回波的脉冲宽度;fD为多普勒频率。若目标相对雷达的径向速度为v,则有
回波信号被雷达接收后,经过混频后得到的中频信号为

其中第i个脉冲的相位为

由式(8)可以看出,雷达回波信号经过混频后得到的中频信号相位发生了变化。因此,通过测量相邻中频回波的相位就可以实现目标速度测量,该方法不受限于积累时间,可以快速实现速度测量。测量公式为

式中:q为相邻中频回波相位差;Δt为相邻中频回波时间间隔;λ为雷达波长。一般情况下,设置Δt≤λ/2v,以避免速度模糊。
采用鉴相方法的测速处理流程如图3所示。首先,完成对当前中频回波信号的I、Q两路采样;然后,与上次采样数据的复共轭相乘后解算出相邻中频回波相位差,按式(9)解算后得到实时速度。
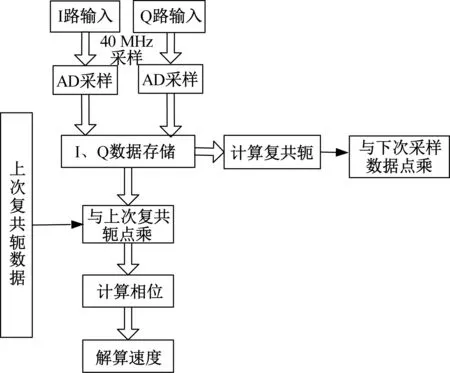
图3 鉴相测速流程图
4 试验验证
通过测量目标摆钟运动,验证太赫兹雷达高精度测速性能。摆钟运动测量模型建立方便,且精度较高,试验布局如图4所示。
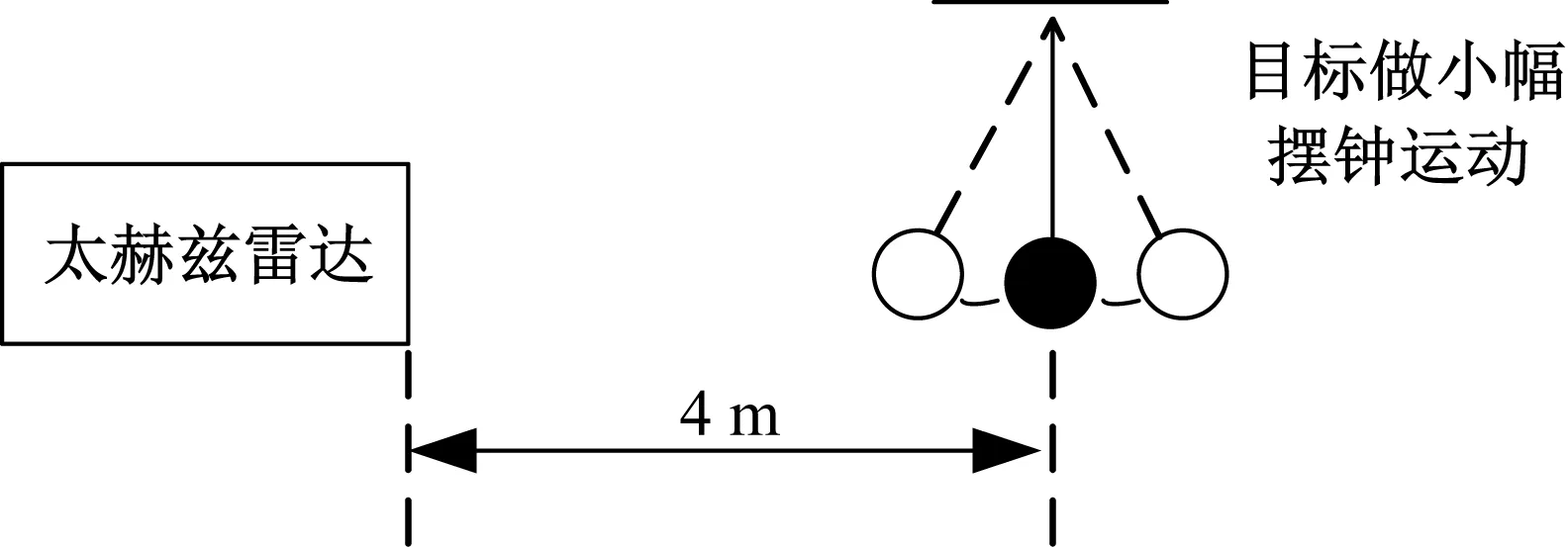
图4 相位测速试验布局图
实验中摆钟的最大摆动速度小于2 m/s,在太赫兹频段由2v/λ计算可得其耦合的多普勒频率为29 k Hz。摆钟目标速度测量试验中,太赫兹雷达参数:波长1.36 mm,周期30μs,调频带宽240 MHz,测量速度(0~2)m/s,采样率40 MHz,单帧采样数1 024点,距离分辨率0.73 m。
4.1 实验过程
摆钟目标运动如图5所示,试验中目标小幅摆动最大移动距离约0.2 m,小于雷达的距离分辨单元,摆钟的摆角为θ,径向速度为v,分解为水平方向速度vh(vh即雷达系统的测量的相对速度)。
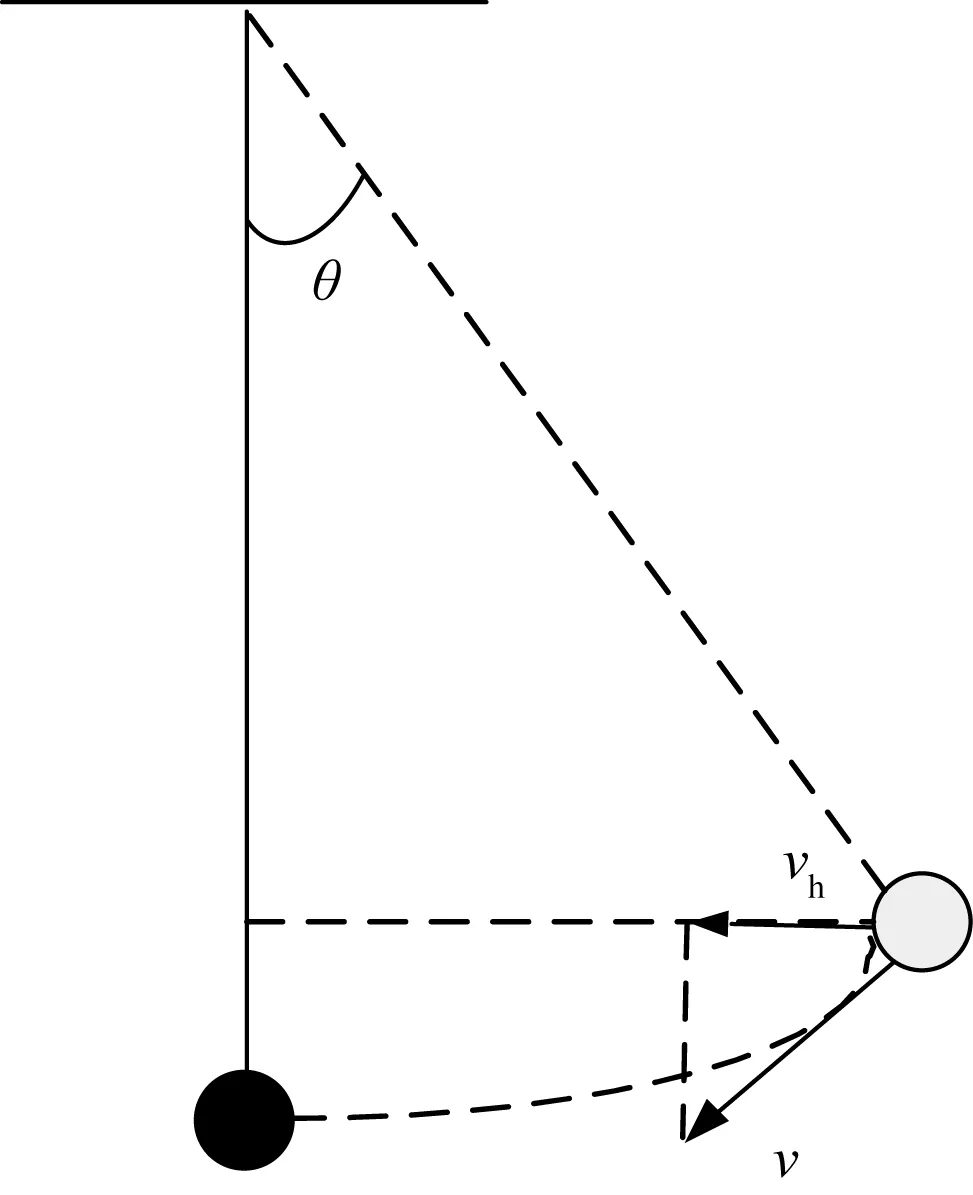
图5 摆钟运动模型示意图
根据受力分析,摆钟沿切线方向的受力为F

式(10)中:负号表示F与位移方向相反。按照牛顿第二定律,加速度为

将式(10)代入式(11),得

即


考虑到空气阻尼的运动情况的运动方程为

根据微分方程的理论,解为

式中:θ1、α为初始参数。
因为ω=dθ/d t,v=ωL水平方向的速度为vh=v cosθ,因此求得
摆钟目标阻尼运动过程的实时速度仿真结果如图6所示。
4.2 实验结果
采用鉴相算法对摆钟运动进行实时测速,测量结果如图7所示。
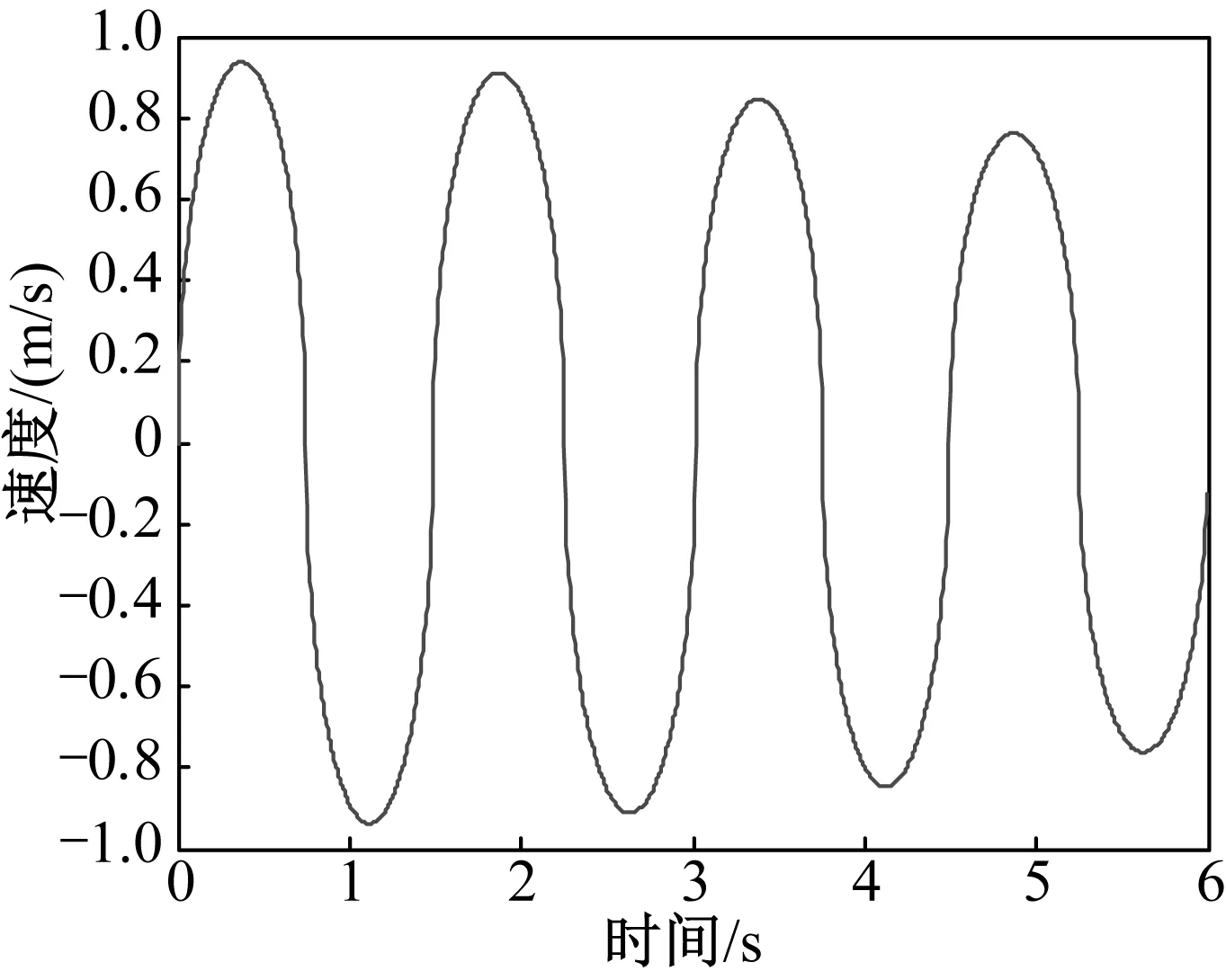
图6 摆钟目标阻尼运动实时速度仿真结果
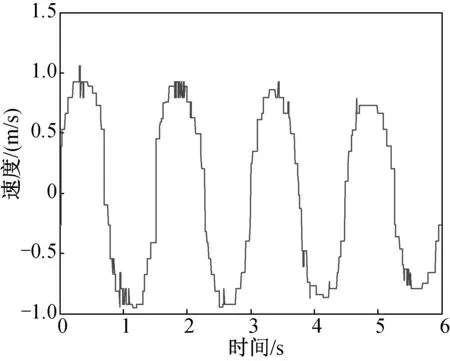
图7 鉴相算法实时测速结果
目标摆钟运动过程中由于存在空气阻力、横向过载等因素,使目标具有阻尼运动的特征(如图6所示),从图7测量结果也可以看出目标摆动过程存在明显的阻尼运动特征。仿真数据和实测速度数据对比结果如图8所示。两者的误差,如图9所示。

图8 相位算法理论仿真和雷达实测值对照图
从图9对比结果可以看出测量误差小于0.1 m/s。由于目标摆钟运动模型的仿真数据不能完全反映横向过载、空气阻力等因素,因此实际测速结果还会优于0.1 m/s。
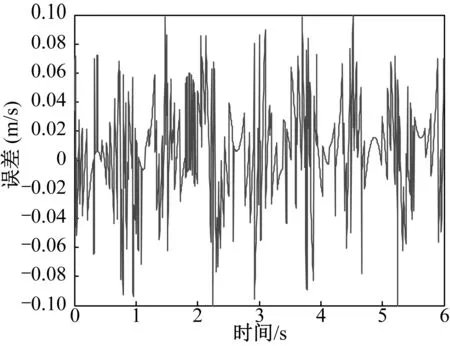
图9 理论仿真和系统验证误差
5 结束语
太赫兹雷达中采用鉴相测速的方法,利用了太赫兹波段多普勒频移特性好的特点,避开了因太赫兹雷达系统非线性引起的幅度、相位补偿问题,并可以快速实现对目标速度的高分辨测量,为太赫兹雷达高分辨、高精度测速提供了新的方法。
