基于2.4 G的双电机遥控船模控制系统设计
2019-11-11谢智阳陈纪钦刘锦滔
谢智阳,陈纪钦,刘锦滔
(河源职业技术学院 机电工程学院,广东 河源517000)
在国家产业结构升级、中国制造2025、工业4.0的大背景下,无线电控制技术飞速发展,已广泛应用于工业遥控[1]、农业喷药[2]、无线开关控制[3]和智能小车[4]等领域.遥控船模是通过无线电等媒介,远程控制船模前后左右运动.现有的传统无线遥控船模,大多功能单调,仅有简单前进后退转弯等功能,且无线遥控模块频段低,相互干扰严重,同时驱动功率较小,不适合长时间高频次的工作场合.
鉴于现有传统无线遥控船模技术的不足,笔者设计了一种基于2.4 G的双电机船模控制系统,通过采用2.4 G频段的发射与接收模块,解决了多设备同时工作相互干扰问题,采用双电机驱动方式,解决了驱动功率小的问题,更适应长时间高频次的工作场合.
1 系统硬件电路设计
1.1 系统结构和功能
系统主要由发送端和接收端两部分组成(见图1).发送端由单片机控制,主要包括功能键输入模块、数码管显示模块、JF24D-TX发送模块和LED状态氛围灯模块;接收端由JF24D-RX接收模块、直流电机驱动电路和驱动电机组成.

图1 系统结构
通过功能键的输入,系统可以实现驱动电机正转、反转和单电机旋转的功能.用以记录船模的运行时间,并由数码管显示模块显示系统工作时间和系统倒计时功能,方便船模经营者有效把握船模运行时间.
1.2 JF24D-TX/RX 2.4 G无线收发模块
目前,家用电视遥控绝大部分采用红外遥控,普通的中远距离遥控模型采用433 MHz,而蓝牙和WIFI技术则广泛应用与手机、电脑等领域[5-7],以LED为代表的可见光通信技术则多应用于水下通信场合[8].以NF2401为代表的2.4 G通信已广泛应用于工控等领域.2.4 G通信抗干扰能力强[9-11],适合多设备在同一场合同时工作.
经对比分析,采用基于2.4 G的JF24D-TX/RX 2.4 G无线收发模块.该模块采用学习代码模式和模块唯一ID号,模块在发送端有6个输入端口,对应接收的6个输出端口,6个通道可以独立工作,不会相互干扰.
1.2.1 发射端控制电路设计
图2为发射端控制电路,发射端控制电路以单片机位控制核心,主要包含功能键输入电路、数码管显示模块,JF24D-TX发射模块和LED状态灯电路.主控芯片采用STC12C5A60S2型单片机,是一款高速,超干扰,高性价比,功能强大的单片机.内部集成EEPROM,2通道PWM,8通道高速10位AD转换电路,是一款专为电机控制和强干扰而设计的单片机.指令代码完全兼容传统8051,但速度快8~12倍[12-13].单片机为本系统的控制核心,负责采集功能键输入模块的信号和输出信号用以控制数码管模块、LED氛围灯和JF24D-TX发射模块.

图2 发射端控制电路
功能键模块用于输入暂停、删除、启动、调时、切换、左转、右转、前进和后退等控制信号,主要表现为:(1)当按下暂停时,整个系统处于暂停待机状态;删除按钮用于删除系统累计的运行时间;开始按钮用于启动系统工作.调时按钮用于调整系统的单次运行时间上限.(2)当MCU接收到前进控制信号时,MCU将高电平信号输出到发送模块JF24 D-TX的A1和A3端子,向A2和A4端子输出低电平信号.(3)当MCU接收到后退控制信号时,MCU将高电平信号输出到发送模块JF24D-TX的A2和A4端子.向A1和A3端子输出低电平信号.(4)当单片机接收到左转控制信号时,单片机向发射模块 JF24D-TX的A1端子输出高电平信号,向A1、A3和A4端子输出低电平信号.(5)当单片机接收到右转控制信号时,单片机向发射模块JF24D-TX的A3端子输出高电平信号,向A1、A2和A4端子输出低电平信号.
其中,数码管模块用以显示当前系统单次的运行时间(以倒计时的方式显示)和累计运行时间.LED氛围灯用以显示船模(车模)的运行状态,前进时LED灯向前轮流闪烁,后退时LED灯会向后轮流闪烁.
1.2.2 接收端驱动控制电路设计
目前,直流电动机驱动电路大致可分为几种类型:具有PWM速度控制功能的H桥驱动电路;以298 N、MC3388和TB6539为代表的H桥集成驱动模块;继电器与晶体管组合的驱动电路;两个继电器组成的可实现正反转的驱动电路.综合对比分析,本文接收端驱动控制电路采用两个继电器组合而成的直流电机驱动电路,继电器组合的直流电机驱动电路运行稳定可靠、可通过电流能力强、无发热现象,适合遥控船模的驱动控制,见图3.
2 系统软件设计
2.1 控制程序整体架构
采用JF24D-TX/RX作为船模系统的通讯模块,该模块集成度高,编程方式简单,无需对其进行复杂的编程即可实现对船模的控制.控制程序需实现系统的时间的存储与显示、控制开关的输入和氛围灯模块显示等功能,见图4.
2.2 船模运行方式控制软件设计
驱动船模的两个驱动电机通过由光耦、三极管和继电器组成的驱动电路驱动,其运行方式由接收模块的B1~B4端子控制.为保证船模的正确运行,控制软件对船模控制的编程逻辑见表1.据2.4 G模块 JF24D可知,发射模块的A1~A4端子分别对应控制接收模块的B1~B4端子,编程时只要正确控制发射端的A1~A4端子的逻辑状态即可实现对船模运行状态的控制,详细的控制流程见图5.
3 系统测试分析
为保证船模测试的真实性,实验测试在河源职业技术学院校内观景湖进行,并邀请多名适龄儿童名分别操控各自的船模.实验过程中,多台船模之间各自运行稳定,无串频现象;遥控操作实时强,延时小于0.2 s;在连续工作两小时情况下,驱动电路板无发热现象.除此之外,遥控系统的时间存储功能、氛围灯功能和船模喷水功能均能正常工作,见图6、图7.

表1 船模运行状态控制逻辑表
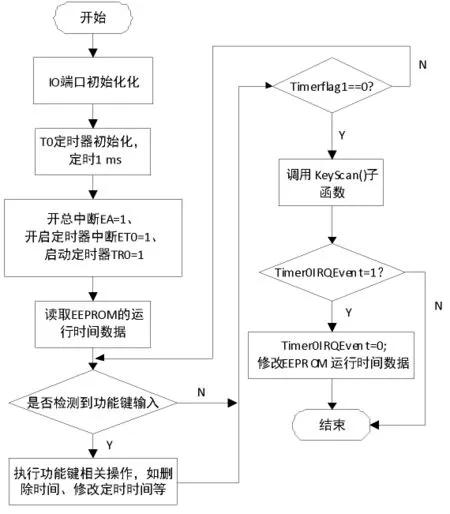
图3 接收端控制电路流程图
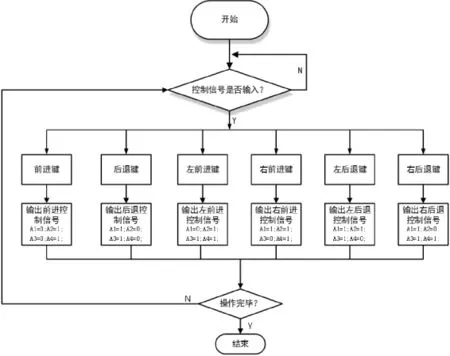
图4 控制程序整体流程图

图6 控制模块实物

图7 船模现场测试
4 结论
与传统遥控船模方案相比,本文设计的控制系统有效解决了多船模同时运行时相互干扰的问题,结合STC12C5A60S2内部的 EEPROM模块,将船模的运行时间记录下来,实现断电记忆.同时利用JF24D通信模块的简单编程功能,优化了MCU的内部程序,减少了驱动电路板继电器数量,有效地控制了电路板面积、制作成本和控制功能,保证了控制功能的多样性和控制系统的实时性.经过实地运行,该系统运行稳定可靠,可在遥控船模控制领域广泛推广.
