智能旋翼连续时间高阶谐波控制稳定性分析*
2019-11-06周金龙董凌华杨卫东
周金龙, 董凌华, 杨卫东
(南京航空航天大学直升机旋翼动力学国家级重点实验室 南京,210016)
引 言
后缘襟翼智能旋翼是一种行之有效的直升机振动主动控制技术[1]。通过安装在直升机桨叶后缘的襟翼主动偏转,动态改变旋翼气动载荷分布,从而达到控制旋翼振动的目的。因其控制效果明显、驱动机构相对简单可靠等突出优点,在当前技术条件下具有工程应用潜力,国外研究机构对此进行了广泛的研究,先后实现了悬停实验、风洞实验和真机飞行实验[2-7]。国内也较早开展了后缘襟翼智能旋翼研究,建立了带后缘襟翼旋翼气弹分析方法和模型[8-9],并进行了智能旋翼振动控制原理验证实验,取得了良好的振动控制效果[10]。
后缘襟翼智能旋翼的振动控制效果依赖于后缘襟翼的偏转运动规律。从直升机旋翼传递到机身的振动载荷主要以NΩ的桨毂通过频率(N=nNb,其中,正整数n=1,2,…;Nb为桨叶片数;Ω为旋翼旋转频率)为主,振动载荷在时域呈现出明显的周期性,因此后缘襟翼的偏转运动规律通常为单一频率谐波形式或若干不同频率谐波叠加而成。后缘襟翼的控制分为开环控制和闭环控制。后缘襟翼开环控制主要以单一频率谐波为主,通过扫相实验寻找振动载荷最低时的最优信号相位,主要用于模型旋翼实验,用以评估后缘襟翼振动控制功效以及后缘襟翼驱动机构工作性能。在实际振动控制中,通常采用闭环控制的方法,利用安装在旋翼或是机身上的传感器采集旋翼或机身的振动载荷信号,并将其传递到振动控制器中,控制器根据当前的振动载荷信息,采用特定的控制算法,计算得到当前状态对应的后缘襟翼控制信号,经过功率放大器的放大后驱动后翼缘襟偏转。
控制器是智能旋翼振动闭环控制系统的核心组成部分之一,其性能和稳定性直接决定智能旋翼的振动控制效果。如果控制器失稳,会表现为控制器输出信号发散,引起旋翼振动载荷增加,并对后缘襟翼驱动机构产生不利影响。笔者根据缩比模型实验结果[11-12]建立了后缘襟翼智能旋翼参数模型,并以此为基础对连续时间高阶谐波控制器(continuous-time higher harmonic control, 简称CTHHC)参数进行了控制系统的稳定性分析,为后续的智能旋翼闭环控制实验中控制器的设计与参数调整提供依据。
1 CTHHC控制器
最早出现的智能旋翼为HHC(higher harmonic control,简称HHC)旋翼,其驱动器作用于旋翼自动倾斜器不动环,通过在总距和周期变距操纵上叠加更高阶的谐波控制成分,达到抑制旋翼振动载荷的目的。由于驱动器串联在直升机操纵线系中,驱动器失效可能会危及直升机飞行安全,因此HHC旋翼并未得到实际应用,但是应用于HHC旋翼的高阶谐波控制算法(higher harmonic control algorithm,简称HHCA),具有算法简单可靠、控制效果好的突出优点,而被推广应用于包括后缘襟翼智能旋翼在内的多种形式智能旋翼振动控制中[13-14]。在智能旋翼发展的早期,受当时计算机性能的限制,主要采用离散时间高阶谐波控制器(discrete-time higher harmonic control,简称DTHHC)。
(1)
其中:zc和zs分别为旋翼振动载荷余弦分量和正弦分量(系统输出量);uc和us为后缘襟翼控制输入余弦分量和正弦分量(系统输入量);dc和ds为无控制输入情况下系统振动载荷的余弦分量和正弦分量;T为智能旋翼传递矩阵,代表系统输入与响应之间的映射关系。
在理想状态下,若旋翼振动载荷得到完全抑制
(2)
则当前扰动状态下后缘襟翼控制律可表示为
(3)
由于控制器在计算旋翼振动载荷分量时需要整周期采样,因此对于DTHHC,旋翼旋转若干周期,后缘襟翼控制律才能更新一次。随着计算机运算能力的提高,连续时间高阶谐波控制CTHHC成为可能,其控制器框图如图1所示。
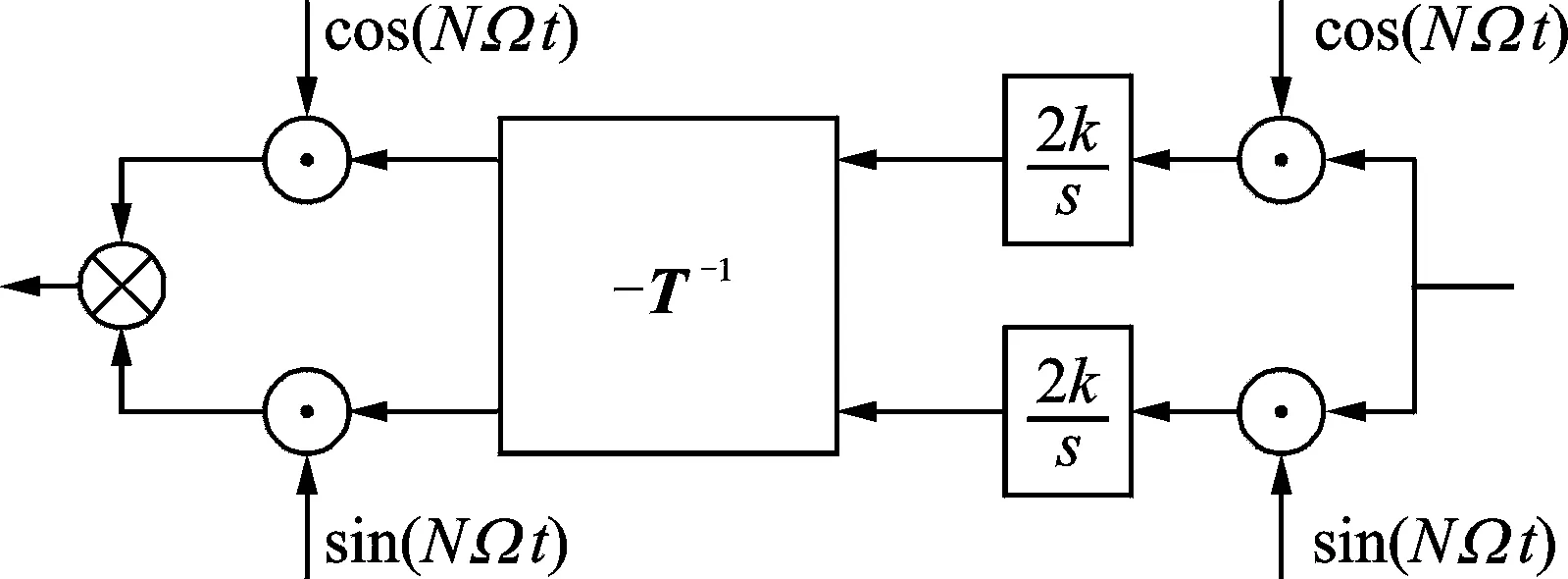
图1 CTHHC控制器框图Fig.1 Block diagram of CTHHC controller
如图1所示,振动信号被正弦信号sin(NΩt)和余弦信号cos(NΩt)调制后通过积分器,与系统传递函数矩阵的逆矩阵-T-1相乘后再经过调制并合成为控制信号。对CTHHC控制器的输入z(s)和输出u(s)进行Laplace变换,整理后得到CTHHC控制器传递函数为
(4)
其中:NΩ为旋翼振动通过频率;z(s)为旋翼振动载荷;u(s)为襟翼控制信号。
参数a,b和k定义如下,其中Real和Imag分别代表实部和虚部
(5)
(6)
k=1/Tn
(7)
其中:G(jNΩ)为智能旋翼在通过频率NΩ处的频响;Tn为时间常数,通常取旋翼旋转周期的整数倍。
CTHHC控制器通过对振动信号的高速处理,在每个控制周期都对后缘襟翼控制信号进行更新,对外界扰动的响应速度更迅速。因此当前国外后缘襟翼振动控制普遍选用CTHHC控制器,包括波音SMART全尺寸旋翼风洞实验[2]、欧直ADASYS项目真机飞行实验[6]和空客直升机(原欧直)Blue Pulse项目真机飞行实验[7],并取得了良好的振动控制效果。
2 后缘襟翼智能旋翼参数化模型
在以往的智能旋翼振动控制仿真计算时,通常采用旋翼气弹耦合模型计算后缘襟翼在给定运动规律下的旋翼振动载荷输出。该方法在计算旋翼载荷时可以考虑入流、桨叶气动力以及结构响应中的非定常非线性因素,计算精度较高,并且有助于研究后缘襟翼振动控制工作原理和指导后缘襟翼工程设计。但是复杂的气弹耦合分析模型,计算耗时较长,难以满足CTHHC控制仿真实时性要求。
CTHHC控制器基于线性时不变(linear time invariant,简称LTI)假设,即将后缘襟翼智能旋翼系统视为LTI系统。Shin等[14]通过对主动扭转旋翼实验数据分析,发现在稳态飞行状态下主动控制旋翼周期时变特性对振动控制的影响较小,旋翼系统可以简化为线性时不变系统。根据气弹耦合计算或实验数据得到旋翼系统的频率响应,以传递函数的形式构建参数化模型,对智能旋翼系统进行建模能够在保证一定精度的前提下显著提高仿真速度。
麻省理工学院进行了后缘襟翼智能旋翼悬停实验[11],采用CTHHC控制算法初步实现了振动闭环控制,但并未对CTHHC控制器参数进行详细分析。该旋翼基于CH-47直升机旋翼马赫数相似缩比模型,后缘襟翼采用带有X型放大机构的压电叠堆驱动器驱动,旋翼参数如表1所示。
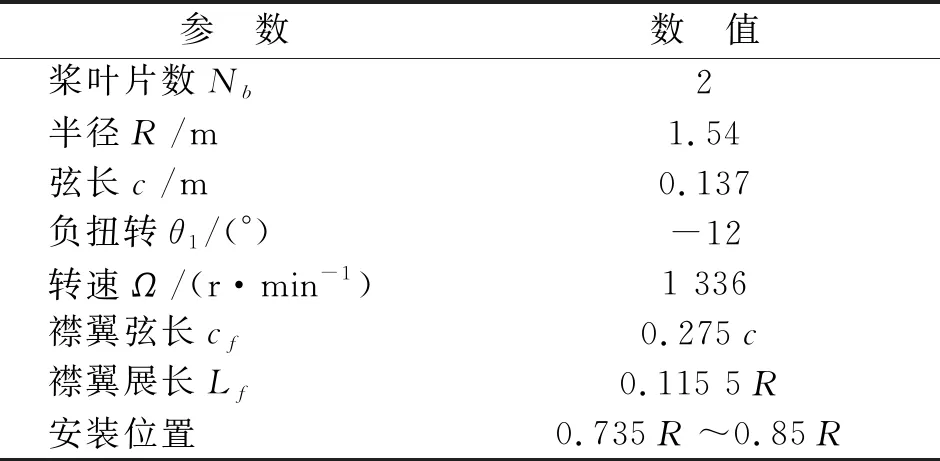
表1 旋翼参数
文中以该缩比模型实验频响数据为基础,通过辨识的方式得到系统的传递函数,系统的传递函数如式(8)所示
(8)
其中:n和m分别为传递函数分子和分母的阶数。
辨识效果如图2所示。
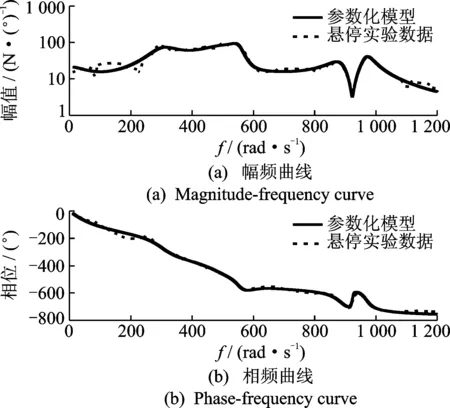
图2 参数化模型和悬停实验频率响应Fig.2 Frequency response of parametric model and hover test data
图2(a),2(b)中的幅频曲线和相频曲线显示所建立的参数化模型能够较好地反映旋翼系统的频响特性。拟合得到的参数化模型的零极点分布如图3所示。由图3可见,参数化模型零极点分布显示其极点均位于左半s平面,因此在无控制器情况下该系统自身是稳定的。
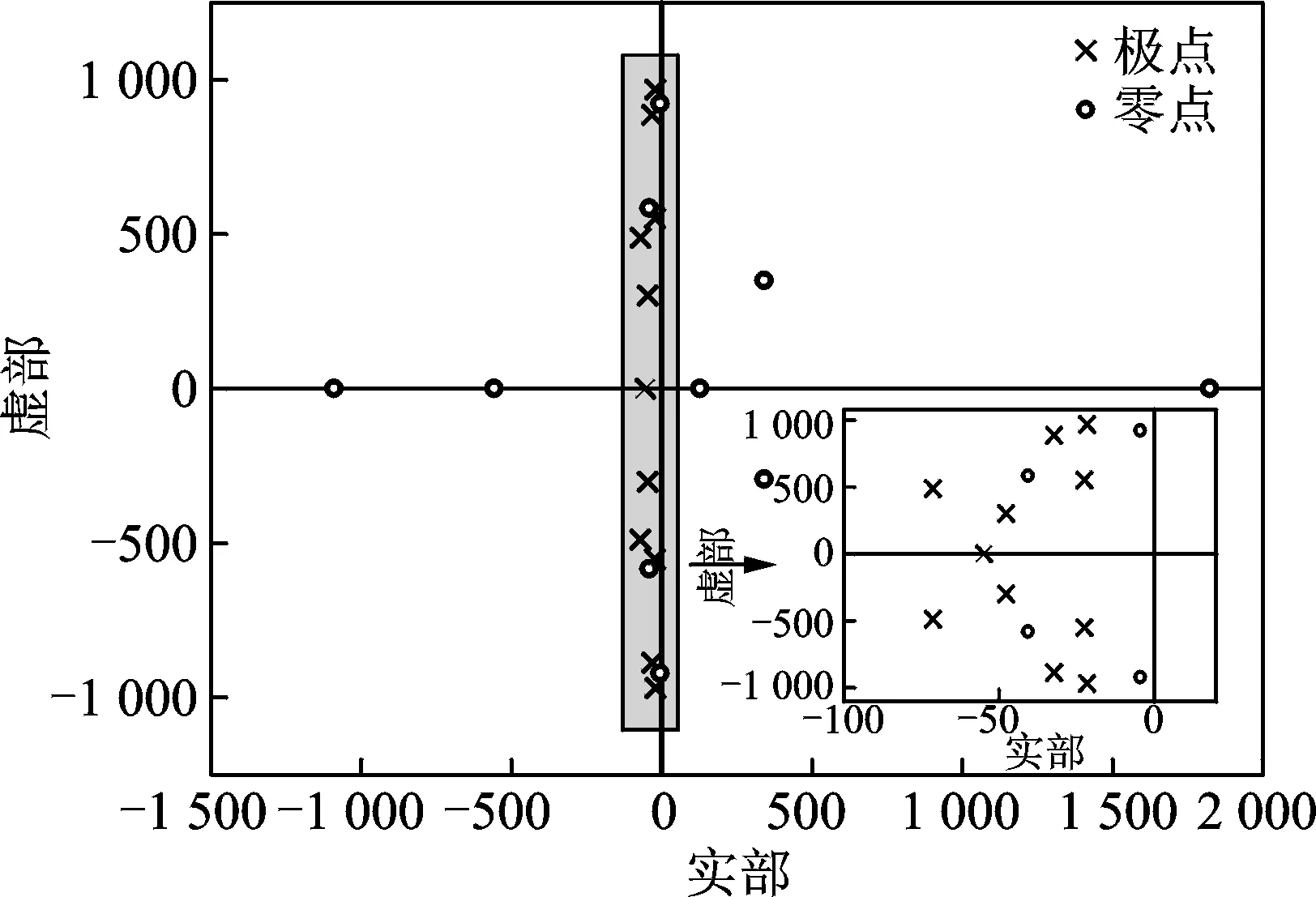
图3 参数化模型零极点分布Fig.3 Zero-pole map of the parametric model
3 后缘襟翼智能旋翼振动闭环控制系统
将建立的参数化模型和CTHHC组合形成如图4所示的闭环控制系统。图中:d为后缘襟翼无控状态下旋翼振动载荷,视为外界对系统的扰动;z为后缘襟翼受控状态下旋翼振动载荷;u为襟翼控制律;y为对应襟翼控制律下的系统响应。
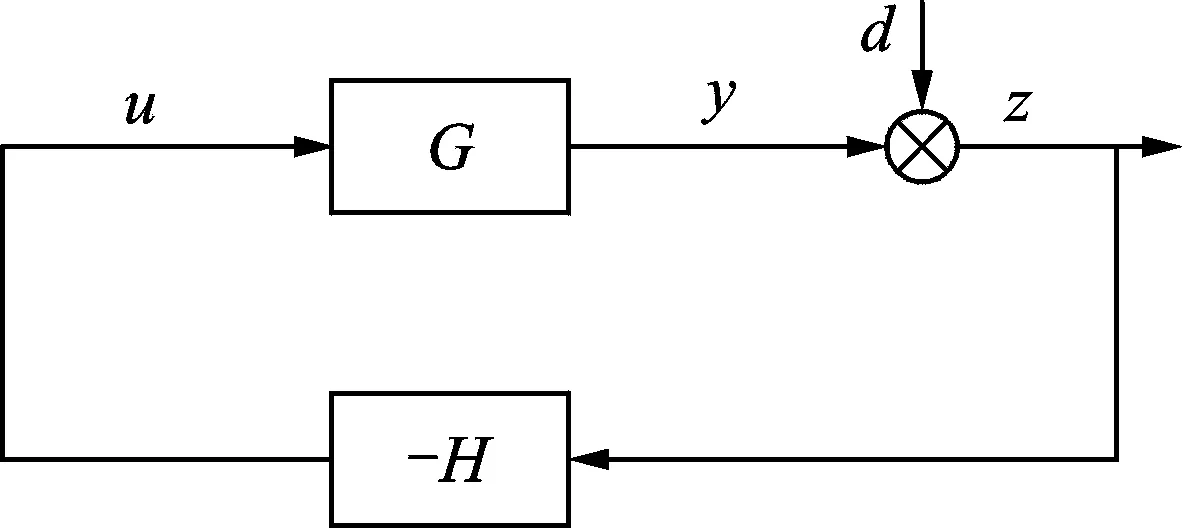
图4 旋翼振动闭环控制系统Fig.4 Closed-loop control system for rotor vibration
后缘襟翼智能旋翼振动控制就是通过控制襟翼偏转u产生适当的系统响应y,抵消扰动d的影响,从而降低旋翼振动z的幅值。受控状态下振动载荷与扰动间的闭环传递函数为
(9)
根据式(4)和式(9),旋翼通过频率s=jNΩ是控制器传递函数H(s)的极点,在s=jNΩ处闭环系统的频响幅值无穷小,从而抑制外界扰动d对系统的影响。
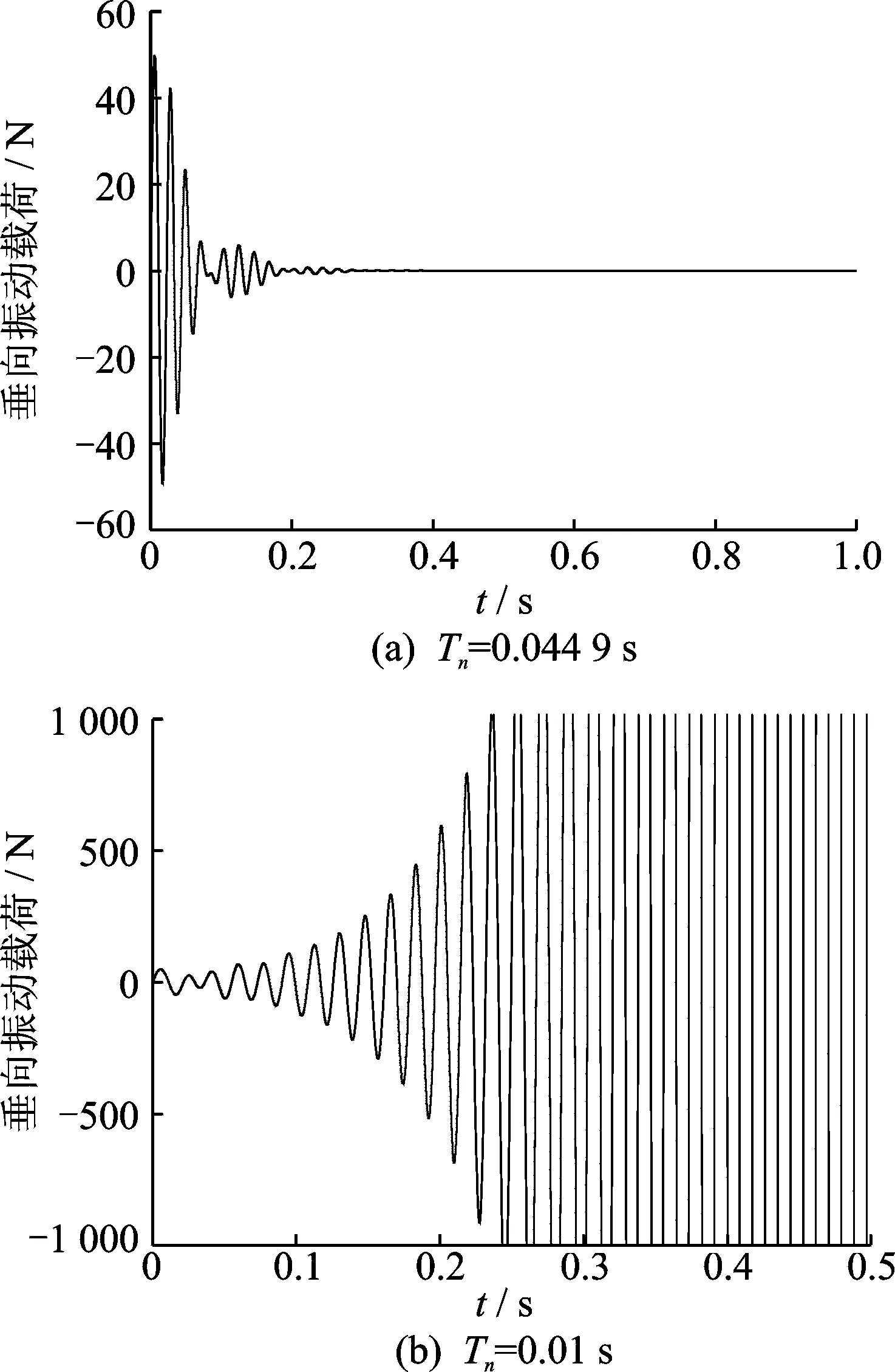
图5 桨毂垂向振动载荷变化Fig.5 Vertical load variation of rotor hub
笔者针对旋翼2Ω通过频率垂向振动载荷,以正弦信号模拟襟翼无控状态下旋翼振动载荷,设定其幅值为50 N,取Tn为0.0449 s和0.01 s,开展振动抑制仿真,旋翼振动载荷变化如图5所示,垂向振动载荷得到了明显的抑制,证明了CTHHC控制器的有效性,但是当控制器时间常数Tn设置不合理时系统可能存在稳定性问题,因此需要对控制器参数进行详细分析。
4 CTHHC控制器稳定性分析
4.1 时间常数Tn的影响
为了研究时间常数对控制系统稳定性和稳定裕度的影响,采用Nichols图的形式显示不同时间常数设置下开环系统的频响特性。Nichols图又称为对数幅相图,实际上是将系统开环Bode图的幅值特性和相角特性整合在一幅图中,其横坐标为频率响应的相角信息,纵坐标为幅值信息。Tn=0.044 9 s时系统的Nichols图如图6所示。
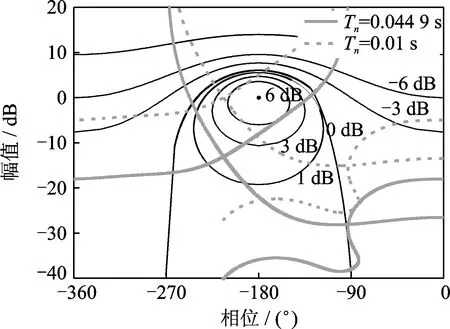
图6 开环传递函数Nichols图Fig.6 Nichols plot of the open-loop transfer function
Nichols图中细实线为系统闭环增益等高线,Nichols曲线与等高线的交点即为当前频率下系统的闭环频响特性,从而通过Nichols图可以由系统的开环特性得到系统的闭环特性。
通过系统开环幅频特性Nichols图可以快速方便地判断闭环系统的稳定性,并确定系统的稳定裕度。根据Nichols图判断稳定性本质上是基于Nyquist判据,Nichols图中的(-180°,0 dB)点对应于Nyquist图中的(-1,j0)点,而Nyquist曲线对(-1,j0)点的包围对应于Nichols曲线对(-180°,0 dB)点的包围。根据图3和式4,系统开环传递函数G(s)H(s)存在右半s平面零点,但不存在右半s平面极点,因此在Nichols图中若存在从(-180°,0 dB)点上方通过的情况,系统不稳定,如图5中Tn=0.01s状态。Nichols曲线与-180°坐标线、0 dB坐标线的交点到(-180°,0 dB)点的距离就是系统的相角裕度和幅值裕度。
文中实验模型旋翼转速为1 336 r/min,旋翼旋转周期为T=0.044 9 s,分别取Tn为T,2T和3T,得到系统的Nichols图如图7~9所示。
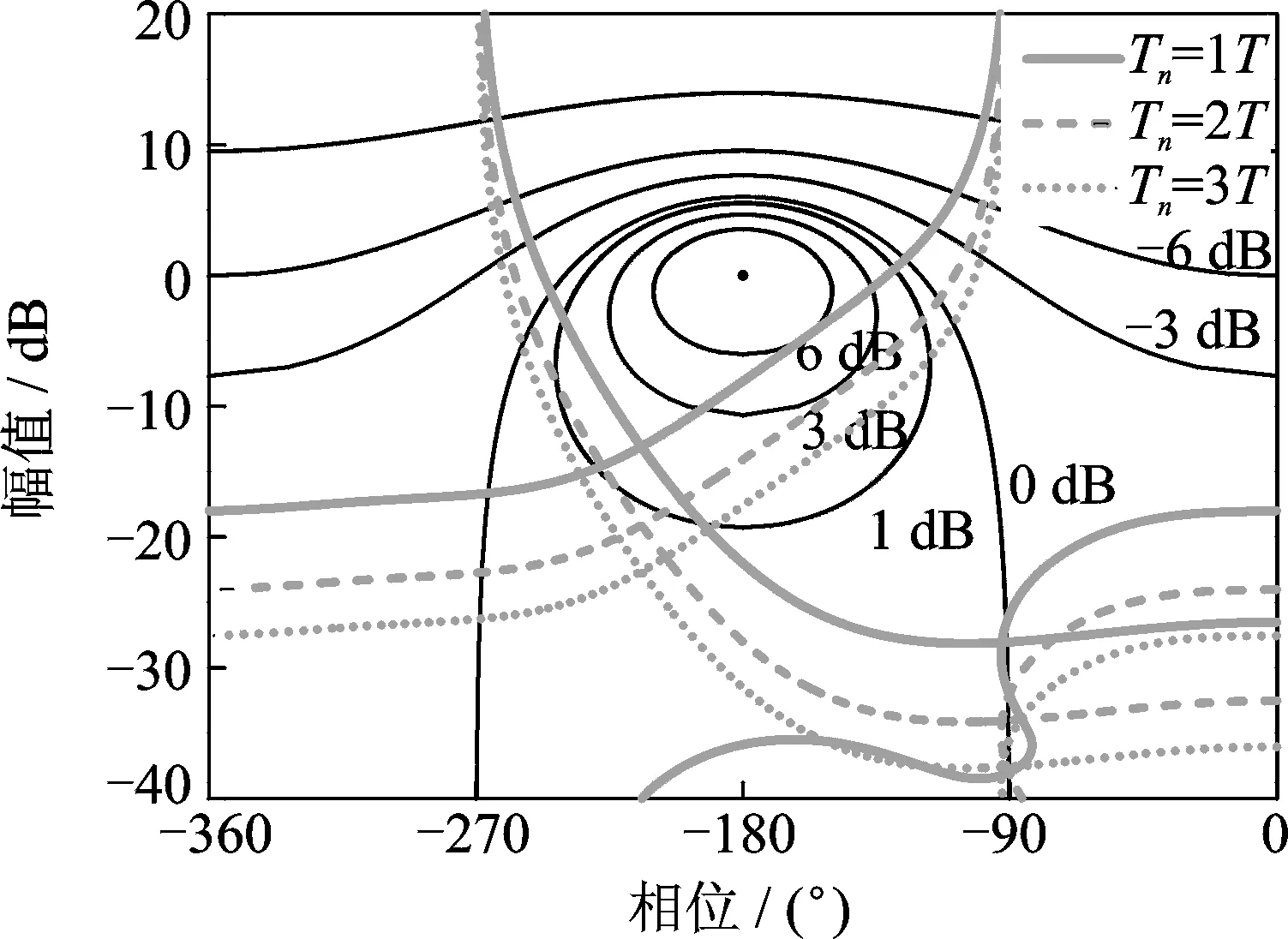
图7 不同Tn下开环传递函数Nichols图Fig.7 Nichols plot of open-loop transfer functions with different Tn
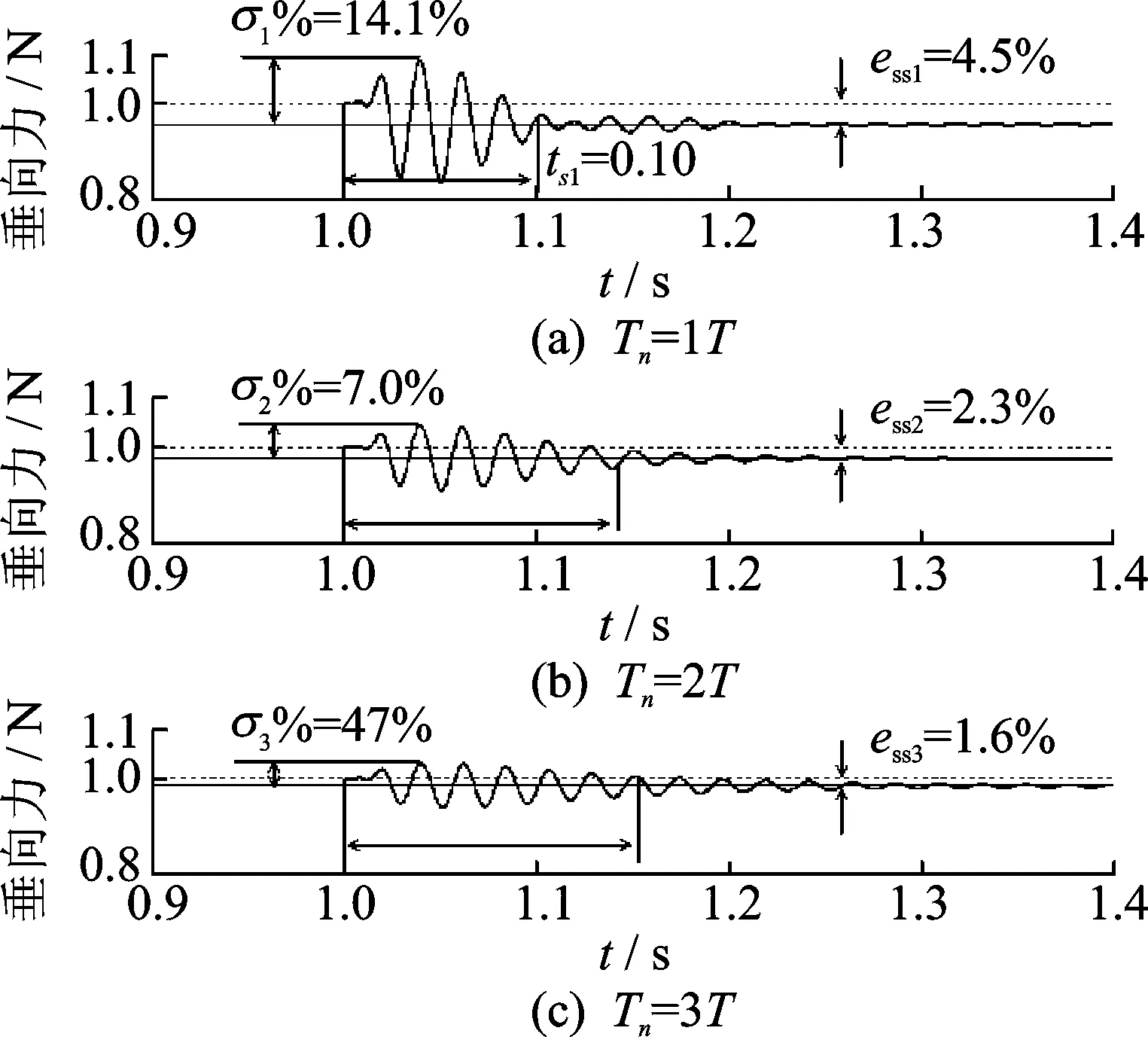
图8 系统阶跃激励响应Fig.8 System response of step excitation
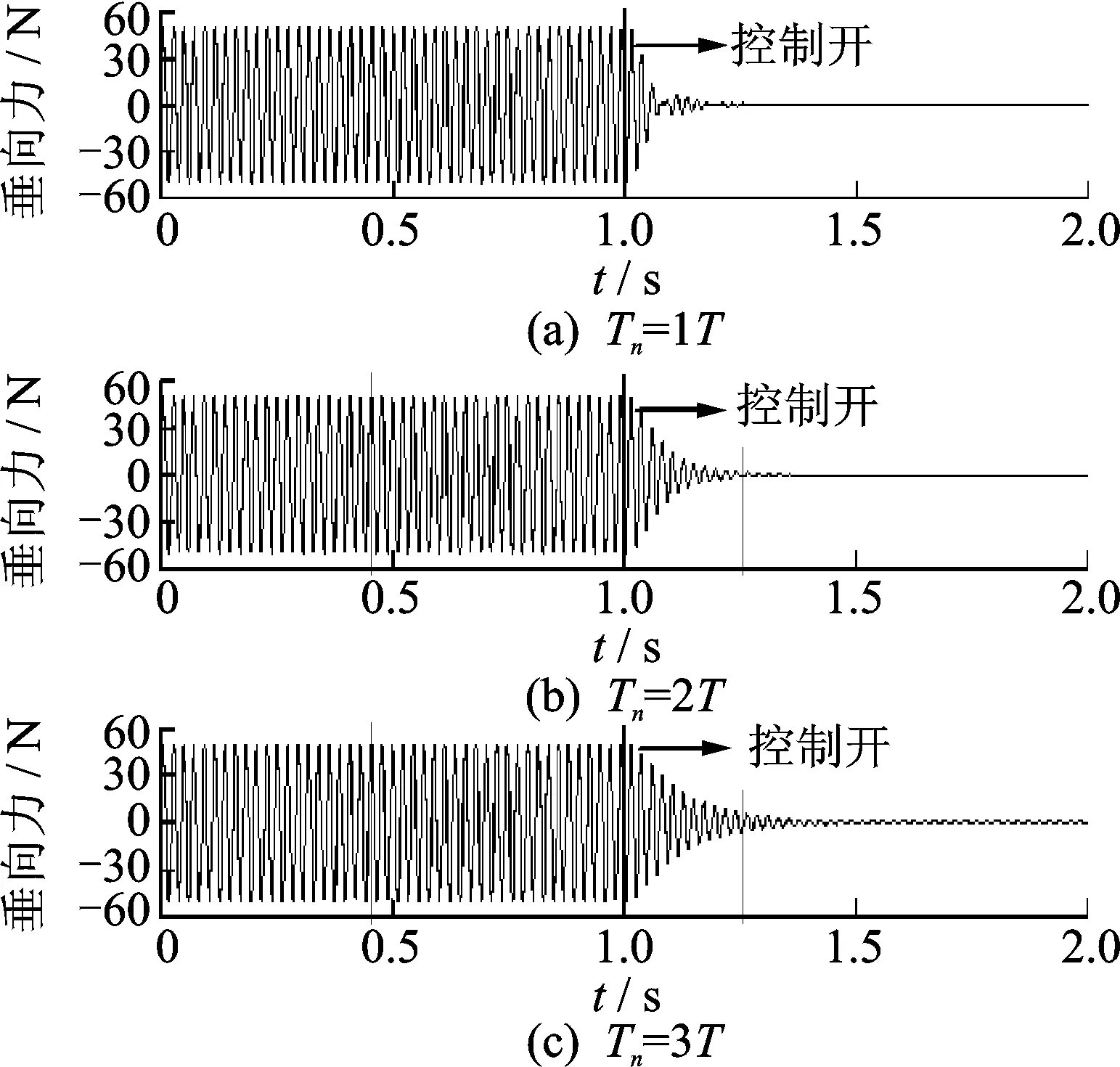
图9 不同Tn下振动载荷变化Fig.9 Vertical vibratory loads with different Tn
从图7可以看出,系统的Nichols曲线随Tn的增大而下移,控制系统的相角裕度和幅值裕度都显著增加,系统趋向于更加稳定。不同Tn下系统的单位阶跃响应分别如图8所示,增大Tn会增加系统稳定时间ts,同时可以减小系统在阶跃激励下的过冲σ%和稳态误差ess。需要说明的是对于直升机振动控制系统而言,CTHHC控制器的作用是抑制旋翼通过频率振动载荷,稳定性和响应速度是控制器设计的重点。当Tn发生变化时,系统的响应速度也会发生变化,不同Tn下旋翼振动载荷变化如图9所示,随着Tn的增加,系统的响应速度逐渐降低。
4.2 延迟τ的影响
在Nichols图中,Nichols曲线与-180°坐标线、0 dB坐标线的交点到(-180°,0 dB)点的距离分别决定了控制系统的幅值裕度与相角裕度。通过增大Tn可以使Nichols曲线下移,从而增大系统的稳定裕度,但是系统的响应速度也会随之降低。从图 6中可以看出,若将Nichols曲线向右移动,也能在一定程度上改善系统的稳定裕度。采用引入延迟环节G(s)=e-τs的方式,调节系统开环传递函数的相角特性,实现Nichols曲线横向移动,可以提高系统的稳定裕度。
将式(5)和式(6)中的G(jNΩ)替换为G(jNΩ)·e-jτNΩ,从而得到系统相角特性改变后的CTHHC控制器参数a和b。固定Tn=0.044 9 s,调整τNΩ的值从而实现Nichols曲线横向移动,如图10所示。
从图 10可以看出, 通过调整τNΩ的值可以改变系统的相角特性,显著增加控制系统的稳定裕度。图11分别为不同τNΩ下系统阶跃激励响应。可以看出,调整τNΩ不会对系统过冲σ%、稳态误差ess带来显著影响。Nichols图在横向移动的同时也会发生纵向移动,从而可能对系统的响应速度产生影响,但是从图12可以发现CTHHC控制器仍然能够迅速抑制旋翼振动载荷,因此通过调整τNΩ来提高系统的稳定裕度是可行的。
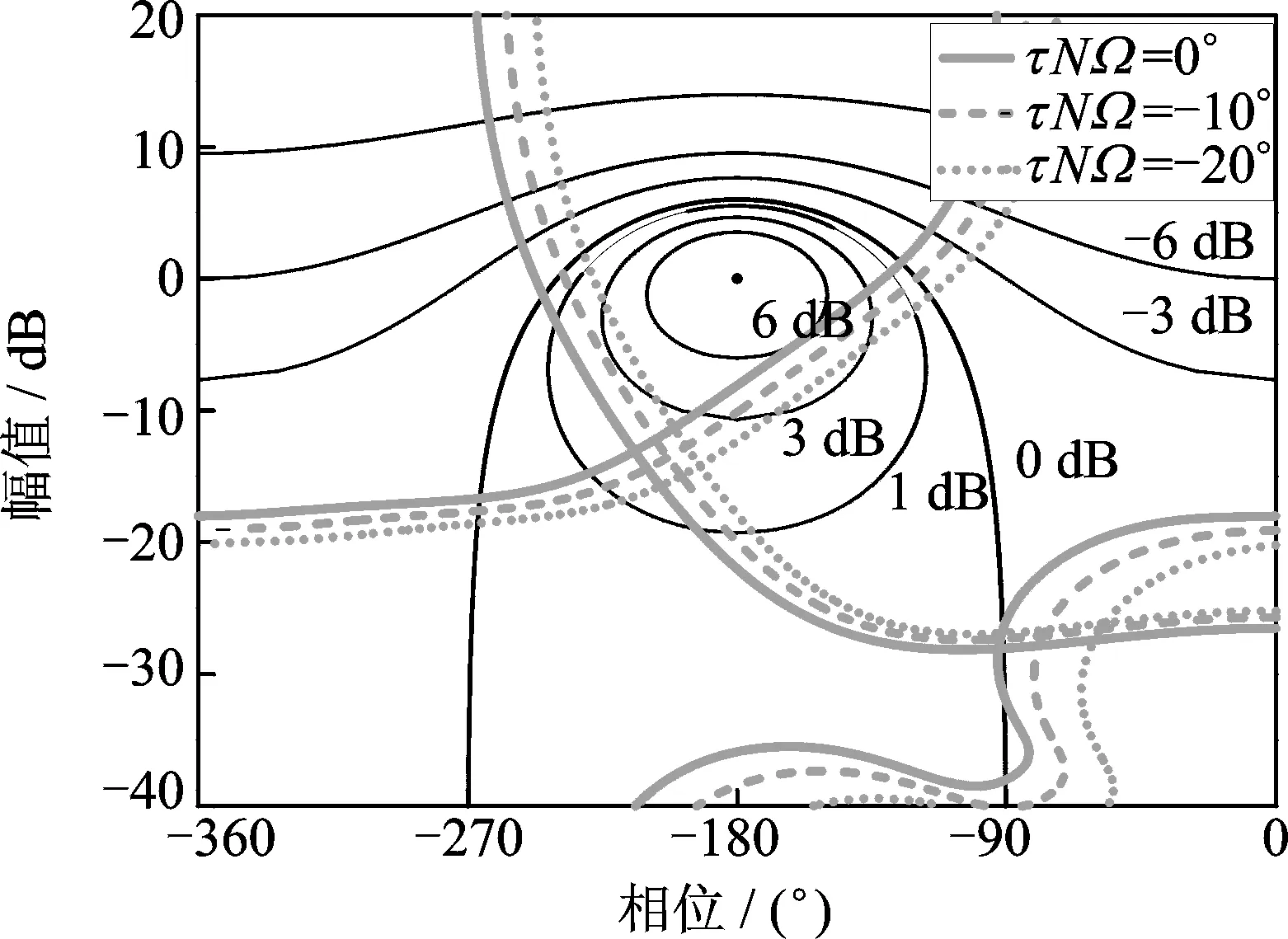
图10 不同相角特性下系统Nichols图Fig.10 Nichols chart of different phase characteristics
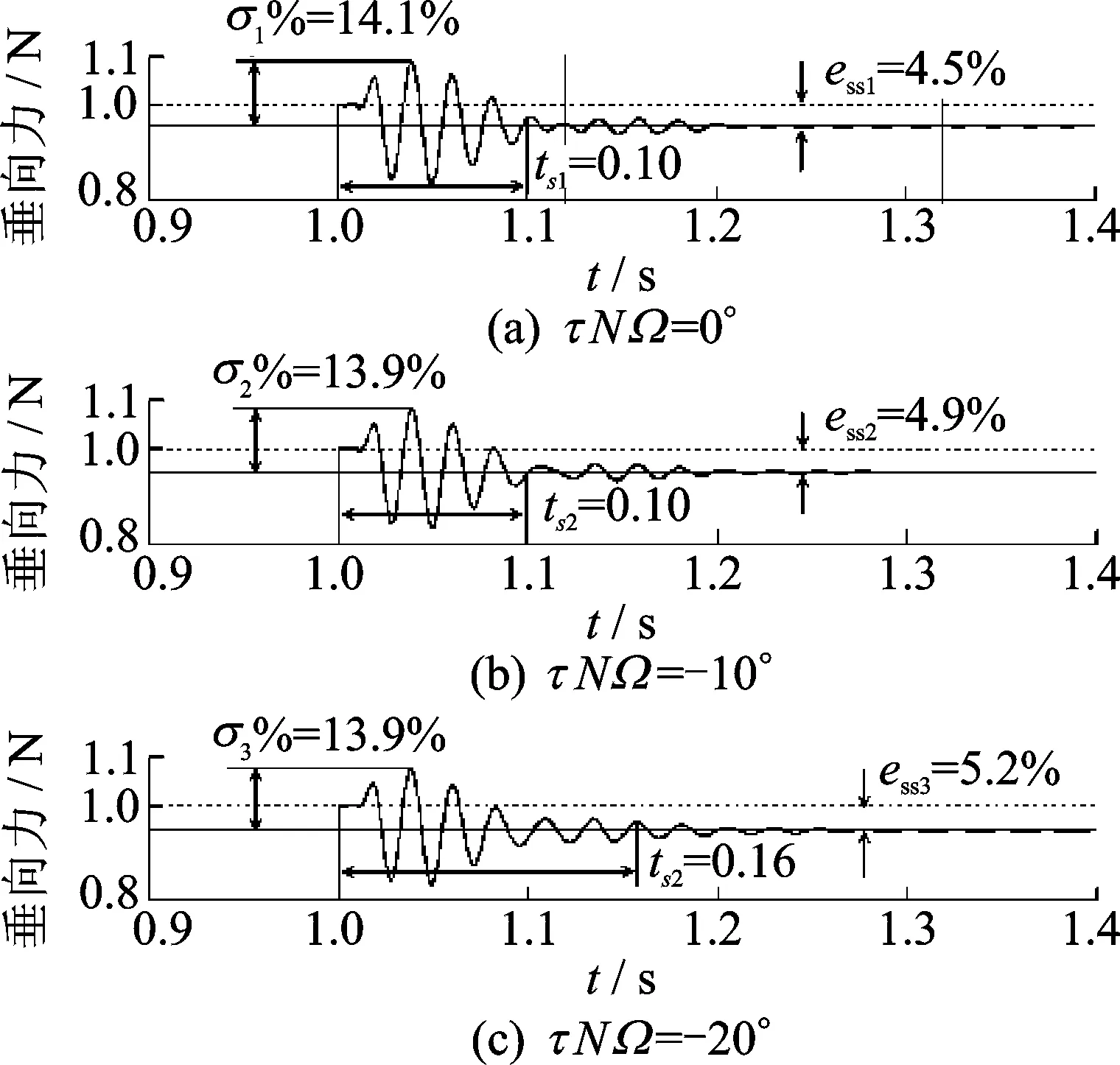
图11 系统阶跃激励响应Fig.11 System response of step excitation

图12 不同相角特性下振动载荷变化Fig.12 Vertical vibratory loads with different phase characteristics
5 结束语
笔者建立了后缘襟翼振动控制参数化模型,对控制器不同时间常数和延迟进行了仿真分析,仿真结果表明:a.连续时间高阶谐波控制算法能够有效抑制旋翼振动载荷;b.增大控制器时间常数可以增大系统的稳定裕度,表现在Nichols图中位系统的开环幅相曲线下移,但是增大时间常数会降低系统的响应速度,影响智能旋翼系统的振动控制性能;c.通过引入延迟环节改变系统的相角特性可以在一定程度上改善系统的稳定裕度,表现在Nichols图中为系统的开环幅相曲线水平移动,并且调整系统相角特性不会显著影响振动控制性能;d.为了获得更好的控制器性能,可以适当选取较小的时间常数,并通过调整系统相角特性来改善系统稳定裕度,使得振动控制系统在响应速度和稳定性间达到平衡。
