考虑基体变形的混合润滑结合面接触特性*
2019-11-06云强强李治强蔡安江段志善
李 玲, 云强强, 李治强, 蔡安江, 段志善
(西安建筑科技大学机电工程学院 西安,710055)
引 言
为了满足特定的要求,绝大部分机械设备由许多零件、部件及其相互连接的结合面组成[1],结合面的种类很多,但都是相互接触的粗糙表面且起着传递运动、载荷和能量的重要作用。实际工程中普遍采用润滑剂和添加涂层等方式降低摩擦因数,减少表面磨损,提高设备使用寿命,但会引起结合面复杂多变的接触特性。
针对这一问题,国内外学者进行了大量的研究[2-3]。Greenwood和Williamson基于Hertz理论提出粗糙表面的接触模型(简称GW模型[4]),将单个刚性球体与弹性半空间的接触扩展为一个刚性平面与一个粗糙表面间的接触,通过统计学方法分析多种因素对结合面的影响规律;但该模型受假设条件的约束,忽略了微凸体的塑性变形、微凸体之间的相互作用以及基体变形,无法准确地描述粗糙表面的接触特性。为了修正GW模型的假设条件,Chang等[5]提出了一种用于分析粗糙表面接触的弹塑性模型(CEB模型),该模型基于塑性变形期间微凸体的体积守恒,获得了微凸体的临界塑性变形。Kogut和Etsion基于CEB模型提出了弹塑性微观接触模型(K-E模型[6-7]),使用有限元方法研究了单个球体与刚性平板的接触问题,揭示了微凸体从弹性、弹塑性到完全塑性的3个不同阶段。进一步地,Chandrasekar等[8]利用有限元方法对粗糙表面接触过程进行仿真,发现微凸体相互作用对结合面接触特性有着明显的影响,所提出的模型能很好地反映结合面的法向载荷-变形关系。Iida等[9]基于Green函数计算相邻微凸体侧向接触引起的位移,研究了微凸体之间的相互作用。Wang等[10]基于弹性理论,获得了微凸体相互作用引起的变形,提出了考虑微凸体相互作用影响的分形接触刚度模型。
关于混合润滑条件下结合面的研究,文献[11-12]基于Greenwood和Tripp模型给出了结合面弹流润滑的数值解,考虑了微凸体相互作用对液体介质厚度的影响。Gonzalez-Valadez等[13]基于界面的超声反射系数与接触刚度之间的关系,采用超声反射回波测试方法获得混合润滑结合面的接触刚度,实现了固体表面接触刚度与液体介质接触刚度的耦合。上述文献均基于传统模型研究了润滑状态下粗糙接触界面的接触特性,忽略了基体变形的影响。但是,如果粗糙表面上包含硬涂层或表面膜时,粗糙表面将由表面涂层与基体组成,此时传统模型无法准确地描述其接触行为。
为进一步分析混合润滑状态下结合面的接触特性,弥补上述模型不能研究基体变形的不足,笔者基于二维分形理论建立了混合润滑状态下考虑基体变形的结合面接触模型。综合单微凸体-基体系统模型,获得考虑基体变形的固体表面接触刚度。同时,利用固体表面的接触刚度计算液体介质的等效厚度,推导了液体介质的接触刚度。
1 混合润滑条件下结合面接触模型
两粗糙表面之间的接触可以简化为刚性平面与等效粗糙表面之间的接触,混合润滑状态下,它们之间的间隙由润滑剂填充,如图1(a)所示。此时,基于刚度分配思想,结合面的法向接触刚度K由固体部分和润滑剂部分并联连接[14],如图1(b)所示,可表示为
K=KS+KL
(1)
其中:KS和KL分别为固体表面的接触刚度和液体介质的接触刚度。

图1 混合润滑条件下结合面接触示意图Fig.1 Schematic diagram of joint surface in mixed lubrication
1.1 单微凸体-基体系统建模
当机械表面含有硬质涂层,粗糙表面被假设为基体与微凸体的组合。作用于表面的法向载荷通过微凸体传递到基体,此时微凸体和基体可以假设为两个串联的弹簧,如图2所示。

图2 接触模型原理图Fig.2 Schematic of the contact model
图2中系统的总变形量δ是微凸体变形量δa与基体变形量δb之和,如式(2)[15]所示
(2)
其中:k为微凸体-基体系统的刚度;ka为微凸体的刚度;kb为基体的刚度。
根据刚度的定义,单个微凸体的法向接触刚度[16]可以表示为
(3)

基于弹性理论,基体表面的变形量[5]表示为

根据平衡条件,微凸体变形引起的基体变形量为
(6)
联立式(5)和式(6),可以得到基体的刚度kb为
(7)
联立式(2)~(7)可知
(8)
化简得
(9)

令δa=f(δ),式(9)可以表示为
(10)
利用不动点迭代法,可以得到式(10)的近似解,则式(10)又可以表示为
(11)
其中:n=0,1,…,∞,迭代的次数越多得到的结果越精确。
为计算方便,取起始点f0为
(12)
将式(12)代入式(11)进行迭代,发现只需迭代2次得到的近似解就非常接近于计算得到的数值解,且误差不超过5%,因此微凸体的变形量可以近似为前2次迭代的解
(13)
图3描述了采用数值解法的式(8)和近似解法的式(13)求得的微凸体形变量在不同涂层下的对比。其中:横坐标表示系统实际位移;纵坐标表示微凸体的位移量;κ表示微凸体材料与基体材料复合弹性模量的比值。由图3可知,对于不同的κ值,数值解与近似解都基本重合,满足误差范围,所以采用近似解替代数值解是有效的。当κ<1时,微凸体材料比基体材料软,微凸体的变形占主导作用;当κ>1时,随着微凸体材料硬度的增加,微凸体的形变量减小,基体的形变量增大,此时基体的变形量占主导地位。从上述结果可知,表面涂层较硬时,基体的变形对接触行为的影响很大。
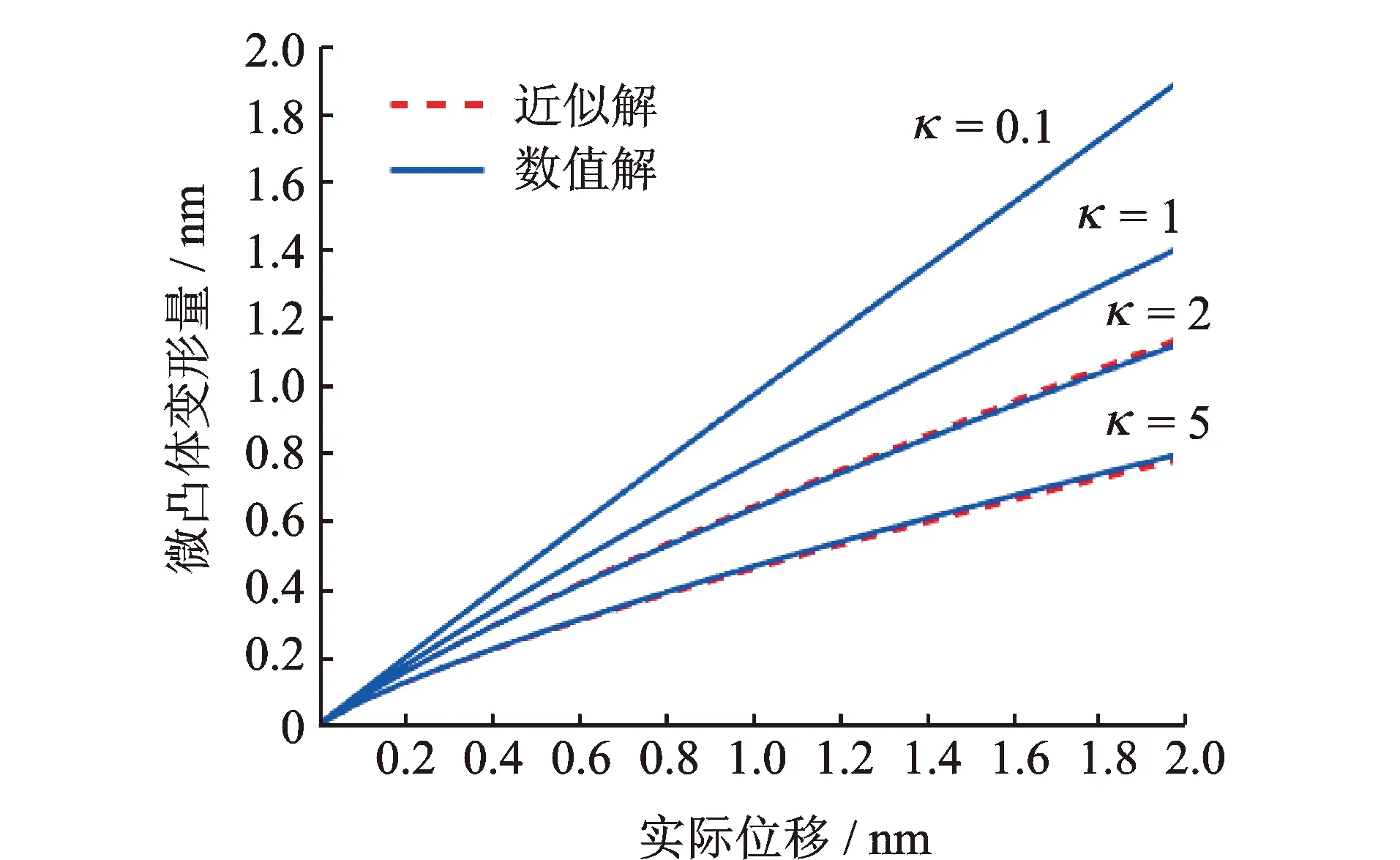
图3 微凸体形变量数值解与近似解的对比Fig.3 Comparisons of single asperity deformation with applied displacement between the numerical solution and approximate solution
基于Weierstrass-Mandelbrot函数(W-M函数)粗糙表面的表面轮廓[17]可以表征为
(14)
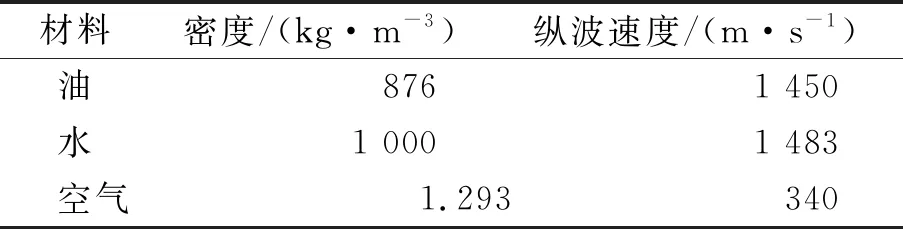
其中:z(x)为随机表面轮廓高度;L为试样取样长度;D为分形维数(1 根据式(14)可得单个微凸体产生的变形为基波波峰与波谷之间的距离 δ=2(4-1.5D)G(D-1)(lnγ)0.5π(0.5D-1)a(1-0.5D) (15) 此时微凸体的实际变形量可表示为 (16) 其中: 由文献[15]可知,微凸体高度可以设为实际位移的3倍,即 ha=3δ= 3×2(4-1.5D)G(D-1)(lnγ)0.5π(0.5D-1)a(1-0.5D) (17) 根据式(14)微凸体的曲率半径可以表示为 (18) 因此,单个微凸体弹性接触载荷为 (19) 研究表明,微凸体的接触变形存在弹性变形和塑性变形。其中微凸体的临界屈服变形[5]为 (20) 其中:H为较软材料的硬度;E′为等效弹性模量;K为较软材料的硬度系数,K=0.464+0.41υa。 当δ=δe时,临界屈服接触面积为 (21) 在完全塑性变形阶段,微凸体的塑性接触载荷[17]可以表示为 fp=λσya (22) 微凸体的接触面积分布函数n(a)与最大接触面积al之间的关系[17]为 (23) 因此,结合面产生的法向载荷可以表示为 (24) 同样地,联立式(21)和式(23)可得结合面的接触面积为 (25) 由于产生弹性变形的微凸体储存弹性应变能,所以结合面固体表面法向接触刚度可以用弹性应变能表示,联立式(3)、式(21)和式(23),得到考虑基体变形的结合面固体法向接触刚度为 (26) 混合润滑状态下,润滑介质填充于两粗糙表面间,此时结合面的接触刚度由固体部分和液体部分组成。假设微凸体的平均高度平面与刚性平面之间的空间充满润滑油,当液体润滑层中介质很薄时,液体质量可以忽略,此时,液体润滑层可以通过一系列轻质弹簧来替代,如图4所示。 图4 固-液-固接触示意图Fig.4 Schematic diagram of body-lubricant-body contact model 此时液体介质接触刚度[13]可以表示为 KL=ρc2/h (27) 其中:h为液体介质的等效厚度;c为纵波在介质中的传播速度;ρ为介质的密度。 润滑材料的声学特性如表1所示。为了简化计算,将油膜的厚度[13]等效为 表1 润滑材料的声学特性 (28) 其中:d0为光滑刚性平面与微凸体平均高度平面之间的初始距离,d0=3σ,σ为等效粗糙表面微凸体高度的均方差;Δd为粗糙表面的等效弹性变形量;KS为固体表面的弹性接触刚度。 联立式(27)和式(28)得液体介质的接触刚度为 (29) 根据式(26)和(29)式得结合面的总接触刚度为 K=KS+KL= (30) 根据Majumdar等[18]的研究,结合面的表面形貌具有分形特征,采用结构函数法将表面轮廓曲线视为一个时间序列,则具有分形特征的时间序列能使其采样数据的结构函数满足 S(τ)=αG(2D-1)τ(4-2D) (31) 其中 (32) 其中:Γ表示第2类欧拉积分;τ为粗糙表面测量仪器的最小采样间距。 对式(31)两端取对数得 lgS(τ)=lgα+(2D-1)lgG+(4-2D)lgτ (33) 由此,可以通过双对数坐标系中直线的斜率和截距求解粗糙轮廓的分形维数D与特征尺度系数G。假设直线的斜率为C,截距为b,则 (34) 选用3组测量试样,结合面的名义接触面积为An=0.01 m2,材料为20CrMo,表面通过铣削加工,利用Talysurf表面轮廓仪测量表面形貌,放大倍率为1 000倍。选用测定微凸体高度标准偏差分别为0.72,2.68和5.63 μm的试样,根据式(34)可求得分形维数D和分形粗糙度系数G的参数值见表2。 表2 不同粗糙度下的D与G值 Tab.2 Fractal parameters values in different surfaceroughness σ/μmDG/m0.721.521×10-112.681.461×10-115.631.465×10-11 为了验证第1节所建模型的正确性,将模型计算的刚度值与Gonzalez-Valadez等[13]采用超声反射系数获得的润滑界面刚度值进行对比。试验选用的材料为40CrNiMoA(EN24),其中润滑剂为油,测试试样的表面粗糙度Ra=3.90 μm,其他参数如表1所示。式(26)和式(29)获得的刚度值与试验数据的对比如图5所示。由图可知,无论固体接触刚度还是液体介质接触刚度,模型所得结果都与参考试验结果一致,说明笔者提出的模型可以有效地预测混合润滑状态下结合面的接触特性。 图5 新模型计算结果与试验结果对比Fig.5 Comparison of the new model results and experimental results 当粗糙表面含有硬质涂层时,基体对结合面接触特性的影响不可忽略,通过传统接触模型分析的结果会产生偏差。图6为法向载荷随真实接触面积的变化规律,横坐标为真实接触面积与名义接触面积的比值(无量纲参数),结合面分形参数取D=1.52,G=1×10-11m。由图6(a)可知,当真实接触面积一定时,通过新模型计算的法向载荷明显低于不考虑基体变形的模型。此外,涂有不同硬度的材料时,结合面的法向载荷随真实接触面积的变化规律如图6(b)所示。图中有3组曲线,分别为κ=0.1,κ=1,κ=10,κ表示微凸体材料与基体材料复合弹性模量的比值。从图中可以看出,当真实接触面积一定时,法向载荷随着κ值的增加而增加。 图6 法向载荷随真实接触面积的变化规律Fig.6 Variation of normal load with real contact area 大部分微凸体的球形区域被认为包含在基体中,所以式(3)和式(7)中包括了基体接触变形的影响。因此当微凸体和基体材料相同时,即κ=1,新模型计算的接触变形量将高于实际接触变形量。为了得到一个确切的接触刚度解,需对式(3)进行修改,排除其中基体对微凸体刚度的影响。然而,当微凸体材料比基体材料硬时,较软基体的接触变形在整个接触过程中占主导地位,因此式(3)使用Hertz解的影响将会很小,最终导致的误差可以忽略。 不同表面形貌时结合面的法向载荷和法向接触刚度-真实接触面积关系曲线如图7所示。选取σ分别为0.72,2.68和5.63 μm的3组试样进行对比分析,σ越大表面越粗糙。图7(a)为不同表面形貌下结合面的法向载荷随真实接触面积的变化规律,由图可知,法向载荷随真实接触面积的增加而增加,当真实接触面积一定时,表面越光滑所需的法向载荷越小。同样地,图7(b)为不同表面形貌下结合面法向接触刚度随真实接触面积的变化规律,与图7(a)相反,当真实接触面积一定时,表面越光滑结合面的接触刚度越大。这是由于表面越光滑,单位面积上微凸体个数越多,单个微凸体承受的法向载荷越小,单位变形的法向载荷越大。 图7 不同表面形貌时载荷和刚度随真实接触面积的变化曲线Fig.7 Relationship between load and stiffness and real contact area with different surface topography 图8 不同润滑介质时刚度随真实接触面积的变化曲线Fig.8 Relationship between stiffness and real contact area for different lubricant 混合润滑状态下,结合面的接触刚度等效为液体介质的接触刚度和固体表面的弹性接触刚度。图8为不同润滑介质时刚度随真实接触面积的变化曲线。图8(a)表示润滑剂为油时结合面的接触刚度随真实接触面积的变化规律,其中:圆圈表示液体油膜的接触刚度;三角形表示固体表面的弹性接触刚度;正方形表示结合面的总接触刚度。从图中可以发现,当真实接触面积较小时,液体油膜的接触刚度远大于固体表面的接触刚度,此时液体油膜的刚度占主导作用。随着真实接触面积的增加,液体油膜刚度缓慢增加但固体表面的接触刚度递增速率明显大于液体油膜接触刚度,液体油膜刚度占总刚度的比率逐渐降低(表面越光滑减小的越快),最后转变为固体的接触刚度主导结合面的接触刚度,如图9所示。 图9 不同表面形貌时液体介质刚度的占比情况Fig.9 The proportion of lubricat stiffness in different surface topography 图8(b)为干摩擦结合面的接触刚度随真实接触面积的变化规律,润滑剂默认为空气。由图可知,圆圈表示空气的接触刚度,几乎趋近于零;三角形表示固体表面的弹性接触刚度,与正方形表示的结合面总接触刚度基本重合。这说明该模型同样适用于干摩擦情况下结合面的接触特性研究。 1) 当粗糙表面含有硬涂层时,基体的接触变形不可忽略,通过传统接触模型分析的结果会产生偏差。当真实接触面积一定时,通过新模型计算的法向载荷明显低于不考虑基体变形的模型,且粗糙表面的法向载荷随着涂层硬度的增加而增加。 2) 随着表面粗糙度的增加,单位面积上微凸体个数减少,单个微凸体承受的法向载荷增加,单位变形的法向载荷(刚度)减小,即当真实接触面积一定时,结合面的法向载荷随着表面粗糙度的增加而增加,而法向接触刚度随着表面粗糙度的增加而减少。 3) 混合润滑状态下结合面的接触刚度由固体表面的接触刚度和液体介质的接触刚度组成。在接触前期结合面的接触刚度主要由液体介质接触刚度主导,随着真实接触面积的增加液体接触刚度占总刚度的比率越来越小,最后转变为固体接触刚度主导结合面的接触刚度。
1.2 结合面固体表面的法向载荷与刚度


1.3 液体介质的接触刚度

2 表面形貌参数确定

3 模型验证与结果分析
3.1 模型验证

3.2 基体变形对结合面的影响

3.3 不同表面形貌对结合面的影响


3.4 不同润滑介质对结合面的影响

4 结 论
