电动轮式畜禽巡检车负载驱动试验及分析*
2019-11-06张铁民张衡超
张铁民, 张衡超, 陈 辉, 梁 莉
(1.华南农业大学工程学院 广州,510642) (2.国家生猪种业工程技术研究中心 广州,510642 )
引 言
电动轮式移动平台在工业、农业生产过程中的应用越来越广泛,电动轮式移动平台不但可以在生产过程中减轻劳动力,提高生产效率,而且采用电池作为动力电源,具有少污染等环保特性,防止农药、化肥等对人体的伤害[1-2]。以电动轮式移动平台为基础,开发应用于工农业等领域的作业机器 ,是替代人类从事高强度体力劳动和代替人做一些具有危害性工作的最佳选择。由于其污染小、效率高且智能化程度高等优点,必将成为未来工农业装备发展的重点方向。
陈亮等[3]以永磁无刷直流电机为控制对象,提出了一种基于平均速度的双电机协调控制策略,但仅研究低速双电机的控制,不够全面。张京等[4]研究了农用轮式机器人,采用四轮独立转向驱动控制系统,具有更好的复杂路况适应能力,但缺少电流、转速的反馈,控制不够精准。文献[5-8]为轮毂电机驱动的电动汽车设计动力总成试验台,利用该平台对轮毂电机驱动电动汽车的性能和整车控制策略测试,但其测试对象比较局限,只能测量轮毂电机[9-12]。
笔者在自主研制的电动轮移动平台基础上,对其稳定性进行研究,优化其硬件电路,采用双闭环控制对电机转速转矩进行了优化,并在测功机平台上进行试验验证其稳定性。
1 控制系统设计
1.1 速度、电流双闭环控制系统设计
速度、电流双闭环控制系统如图1[2],速度调节器作为控制系统的主要调节器,使输出速度能快速的跟随给定速度的变化,可以减小稳态误差,抑制速度波动,对负载变化起抗扰作用。电流调节器作为控制内环的调节器,使电流及时跟随速度环的输出而变化,对电压的波动起及时抗扰的作用。当电机出现过载堵转时,电流环能够限制电枢电流的最大值,起自动保护作用,当故障消失后,控制系统能立即自动恢复正常运行状态。
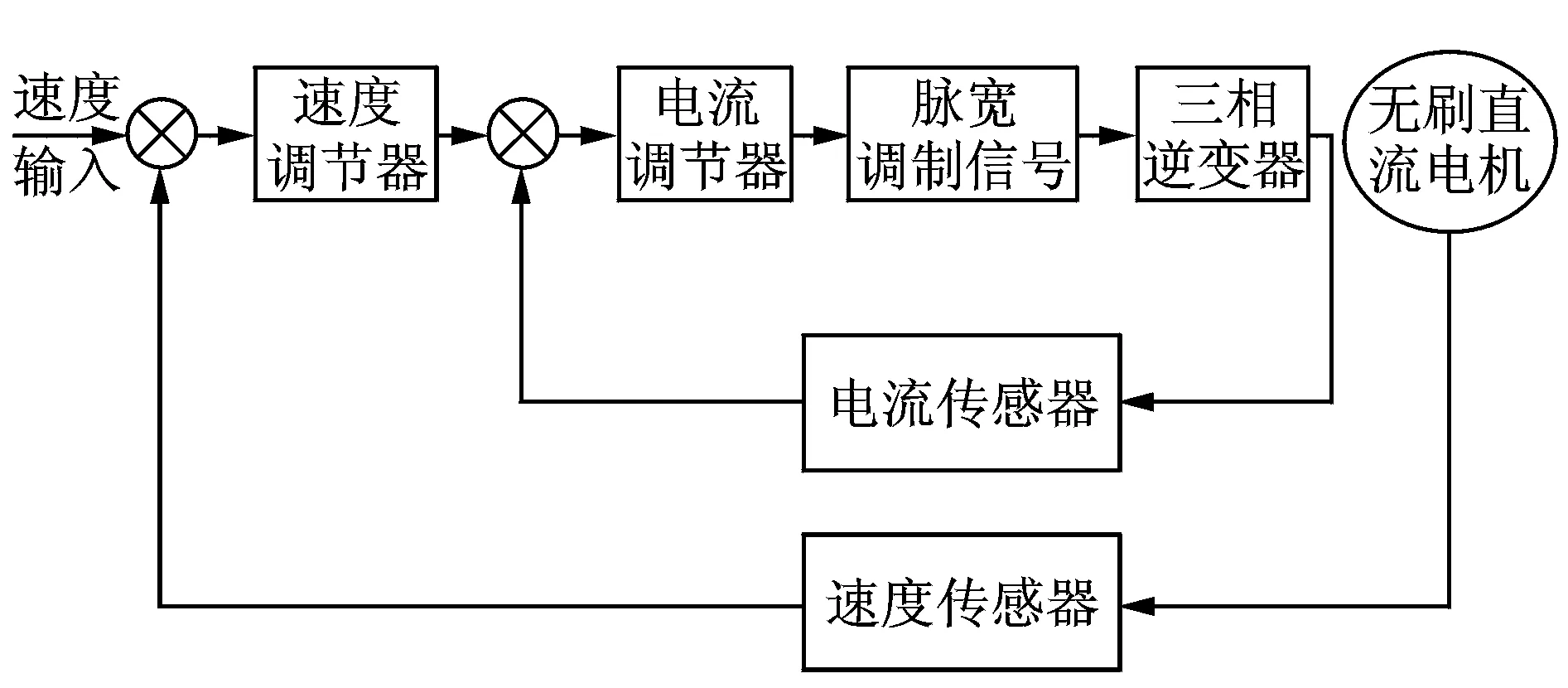
图1 无刷直流电机的双闭环控制结构图Fig.1 Double closed-loop control structure of brushless DC motor
1.2 模糊自适应PID控制系统设计
模糊自适应PID的设计过程主要分为模糊化、模糊推理和模糊规则及反模糊化3个步骤。
结合本研究可得出ΔKP,ΔKI,ΔKD的模糊控制规则分别表1所示。其中:负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)和正大(PB)分别对应7,6,5,4,3,2,1。;e为误差量,ec为误差变化量。
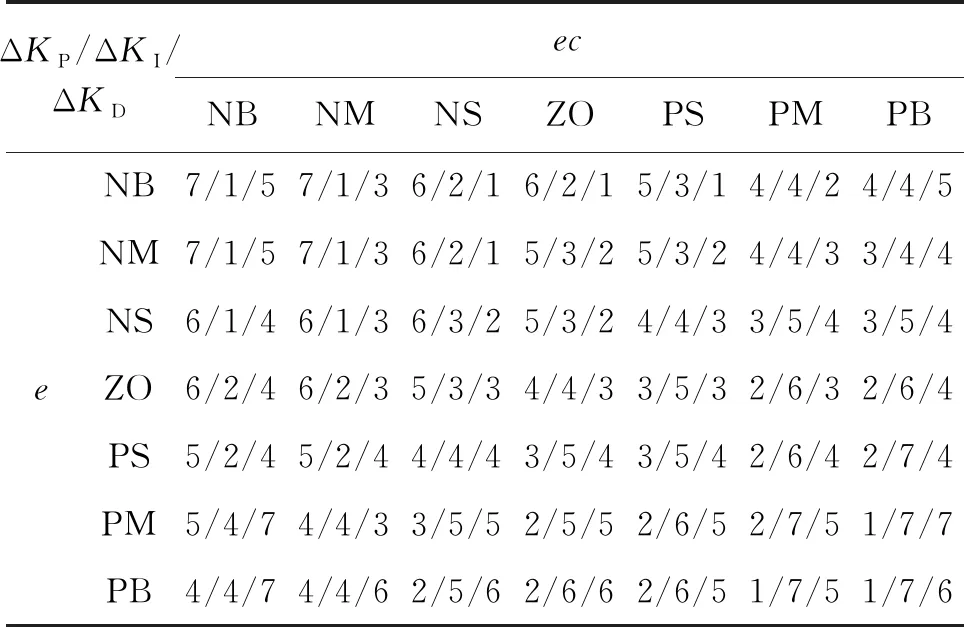
表1 ΔKP,ΔKI,ΔKD模糊控制规则表
选用重心法进行反模糊化
(1)
其中:uB(y)为模糊输出集合。
经过反模糊计算后,利用Matlab可以得出ΔKP,ΔKI,ΔKD的模糊控制查询表,最后得到模糊PID控制中3个新整定的参数,如式(2)所示。
(2)
其中:KP0,KI0,KD0为PID控制器的初始值;KP,KI,KD为PID控制器的新的参数。
KP0,KI0,KD0的初始值分别为0.004,0.077和0.002,其量化因子分别为2 000,100和3 000,由此可得模糊自适应PID参数表达式为
(3)

1.3 系统硬件设计
无刷直流电机驱动控制系统硬件部分主要包括无刷直流电机驱动电路、速度检测电路和电流检测电路。控制器采用STM32F103ZET6作为主控制器,负责输出控制指令以及采集反馈信号并分析处理。系统硬件电路构成如图2所示。
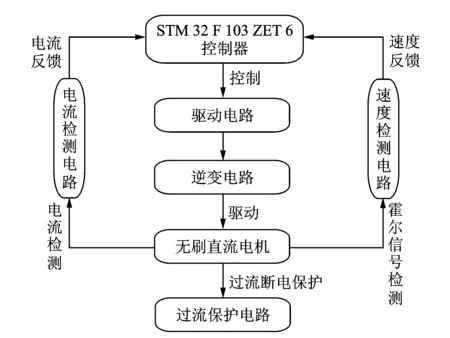
图2 系统硬件构成Fig.2 System hardware structure
驱动电路采用IR2136构成, 如图3所示。IR2136为全桥驱动芯片,通过IR2136可以控制Q1~Q66个MOS管的导通与关断来驱动电机运转,并且其内置死区控制,防止上下桥臂MOS管同时导通造成电路的烧毁。图4和图5分别为电流和速度检测电路,图5中+S 3.3 V为控制器控制电源。
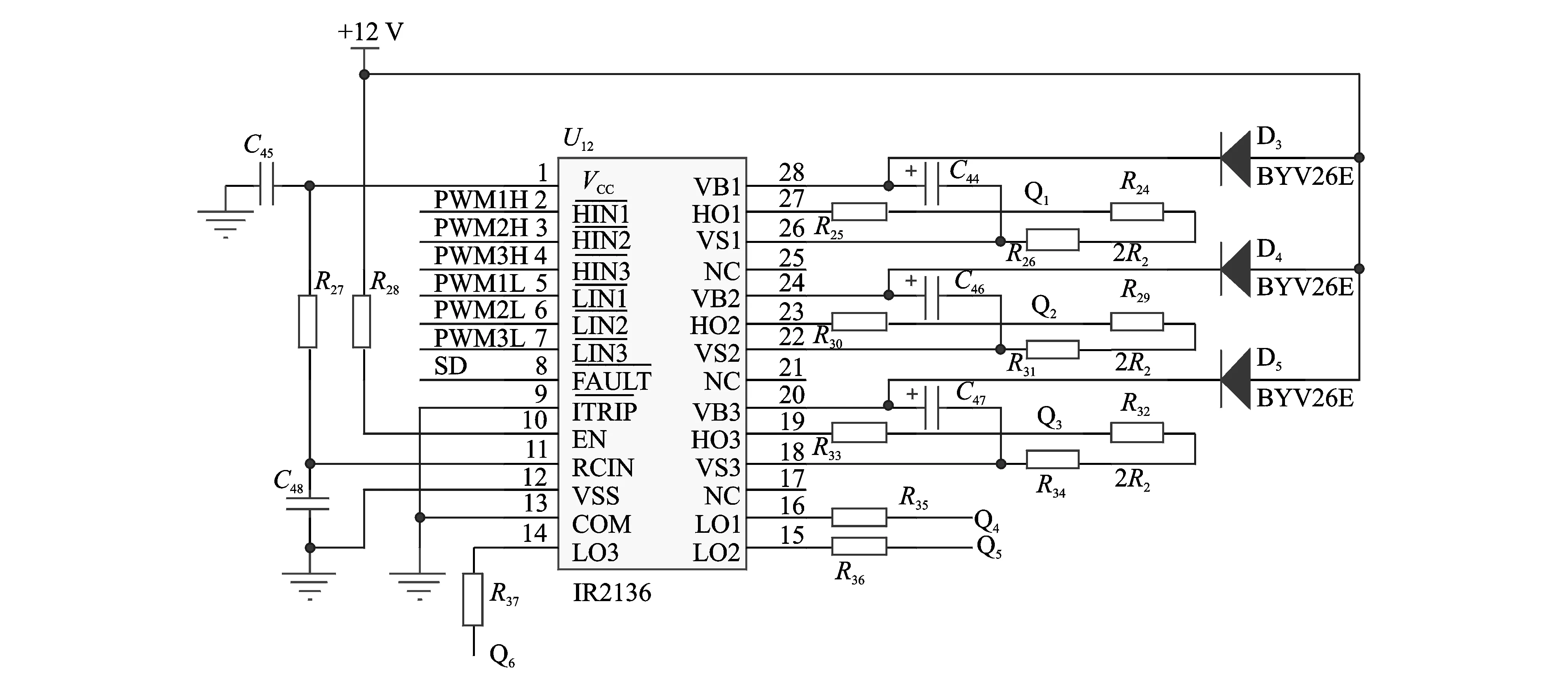
图3 IR2136驱动电路Fig.3 IR2136 drive circuit
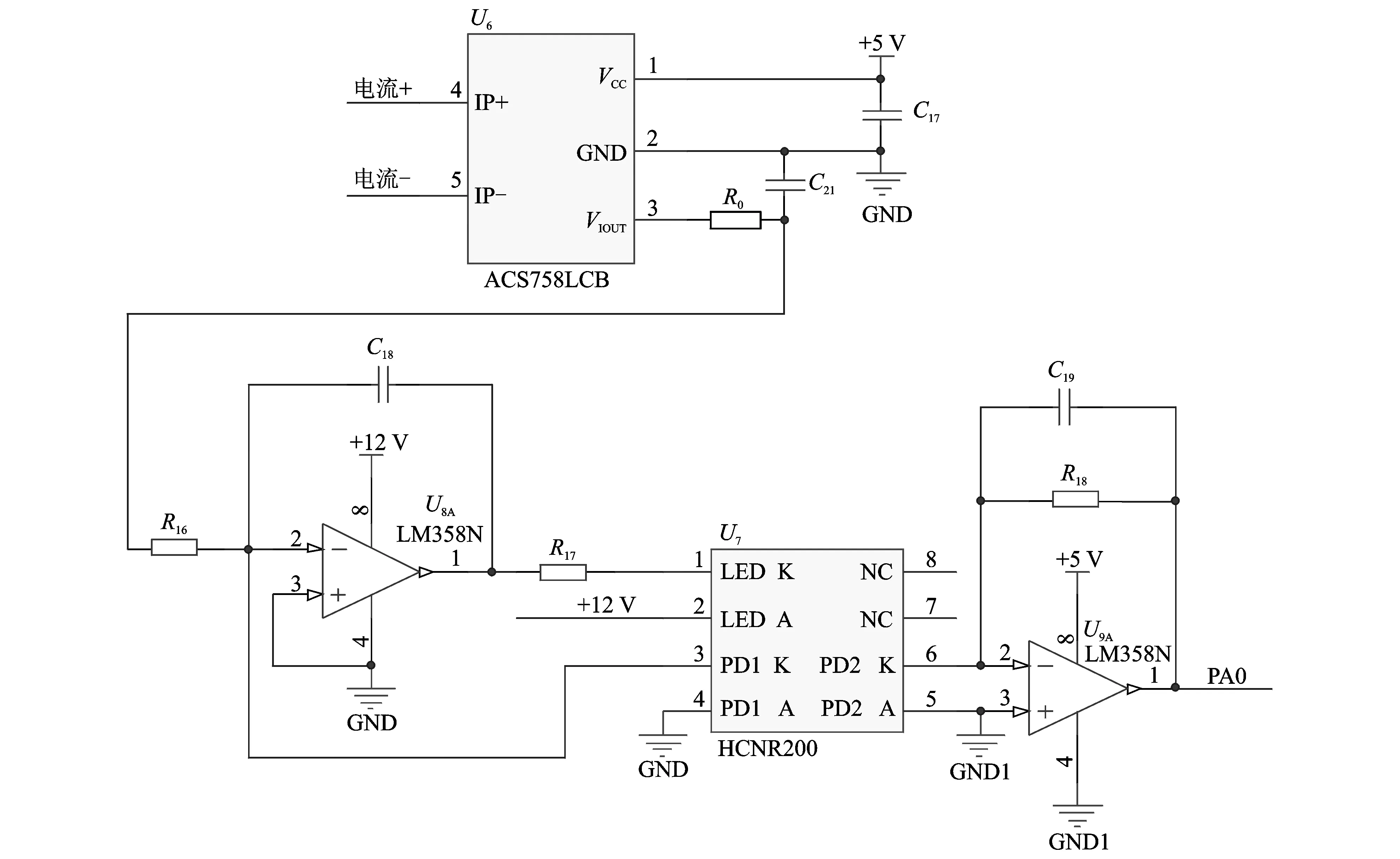
图4 电流检测电路Fig.4 Current detection circuit

图5 速度检测电路Fig.5 Speed detection circuit
2 稳定性试验与分析
系统由Stm32控制板发送指令给无刷直流电机驱动电路板控制直流无刷电机运转,直流无刷电机通过外啮合齿轮以及万向联轴器与测功机联接,如图6所示[2],直流无刷电机运行的扭矩、转速均直接在屏幕上显示,通过驱动直流加载电机模拟无刷直流电机的各种负载。

图6 测功机试验平台Fig.6 Dynamometer experimental platform
将启动转速设定在100 r/min,测试系统在不同负载下的启动可靠性。图7为系统在2.5 N·m负载下的速度曲线,图8为系统在8.5 N·m负载下的速度曲线。由图可以看出,在2.5 N·m负载下,上升时间为170 ms,稳定时间约为1.7 s,稳定后转速维持在100 r/min;在8.5 N·m负载下,上升时间为880 ms,稳定时间约为4 s,稳定后转速维持在100 r/min。
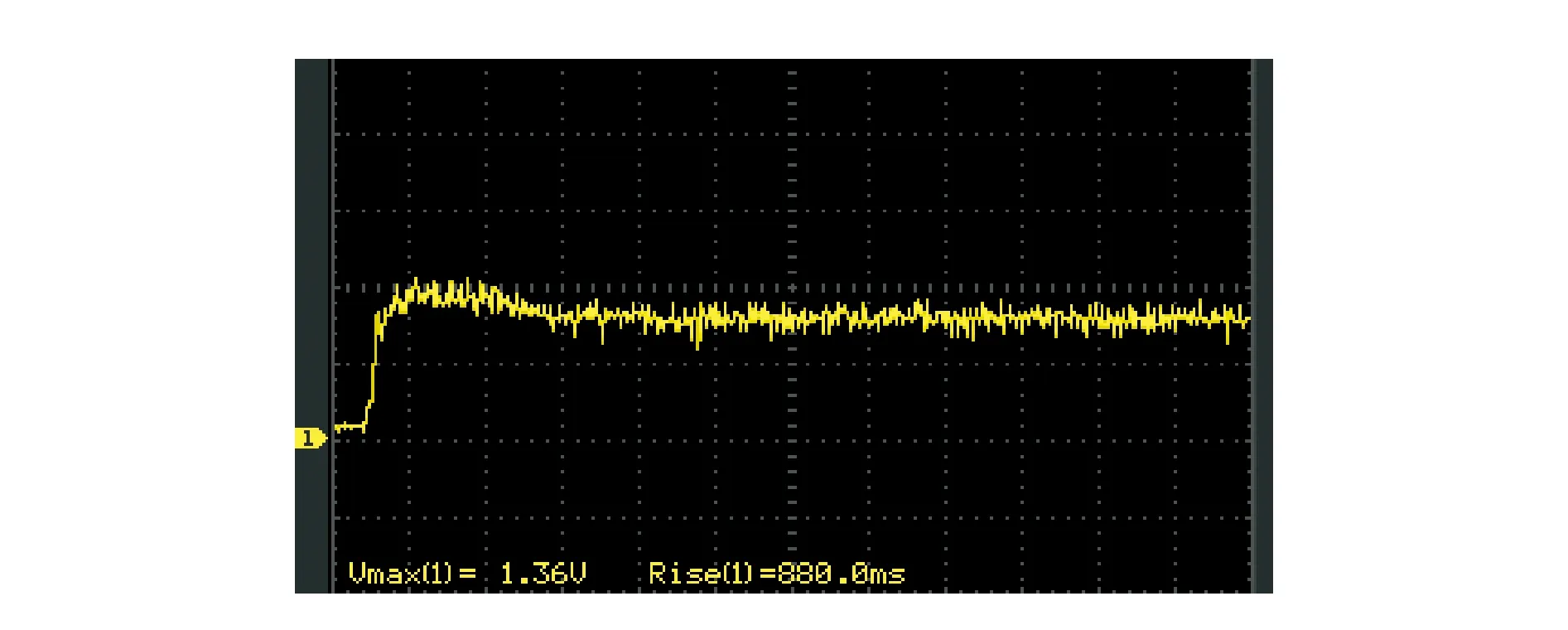
图7 2.5 N·m启动速度曲线Fig.7 2.5 N·m start speed curve
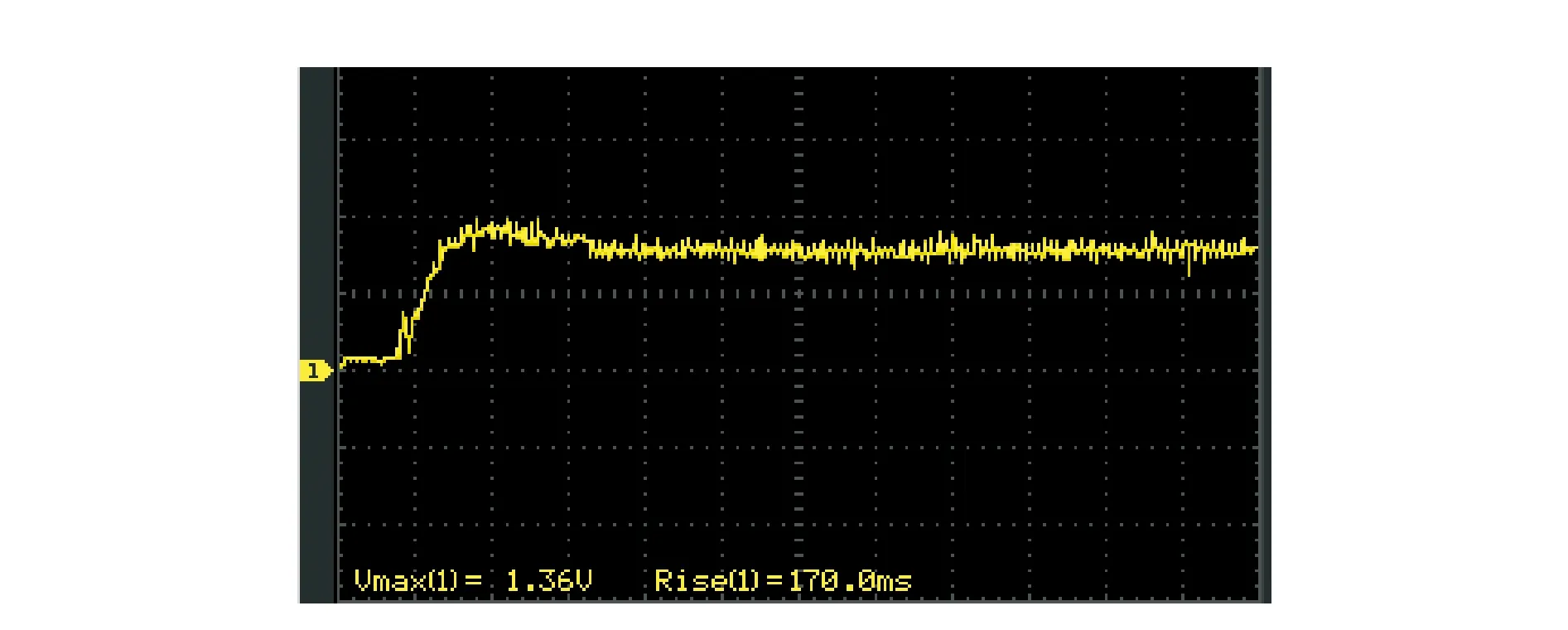
图8 8.5 N·m启动速度曲线Fig.8 8.5 N·m start speed curve
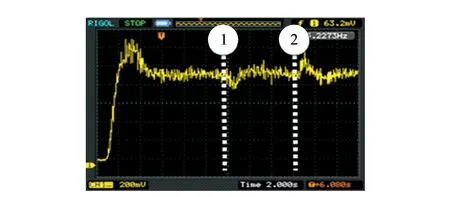
图9 速度响应Fig.9 Speed response
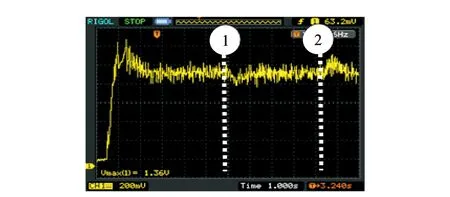
图10 模糊自适应PID速度响应Fig.10 Fuzzy adaptive PID speed response
图9和图10分别为没有采用模糊自适应PID算法和采用了模糊自适应PID控制算法下的速度响应,其中两图中的位置1表示突然增加2.4 N·m负载加载瞬间。图9中速度由101降低到84而后逐渐稳定到100 r/min,图10中速度由101降低到79而后逐渐稳定到103 r/min。位置2表示突然减轻负载,图9中速度由101增加到115而后逐渐稳定到99 r/min,图10中速度由101增加到118而后逐渐稳定到101 r/min。可以看出两者曲线变化近似一致,图10中速度更好地跟随了负载变化,且能稳定在恒定速度。
图11,12分别为没有采用模糊自适应PID算法和采用了模糊自适应PID算法的电流响应,两图中的位置1表示启动电流,图11中启动电流约为8 A,图12中启动电流约为1 A,可以看出,采用了模糊自适应PID的双闭环控制算法较好地控制了启动电流。两图中的位置2表示突然增加负载,位置3表示突然减轻负载到空载。可以看出,相对于图11,12对于负载的变化较明显,电流(转矩)能较好地跟随负载变化,并且能较好地稳定在相应的数值上。

图11 电流响应Fig.11 Current response

图12 模糊PID电流响应Fig.12 Fuzzy PID current response
将系统分别在较低速和较高速情况下通过直流加载电机施加负载进行试验,试验电压均为48 V。将转速稳定在100 r/min,对系统施加负载多次测得数据,随机选取两组数据(1#和2#),如表2所示。
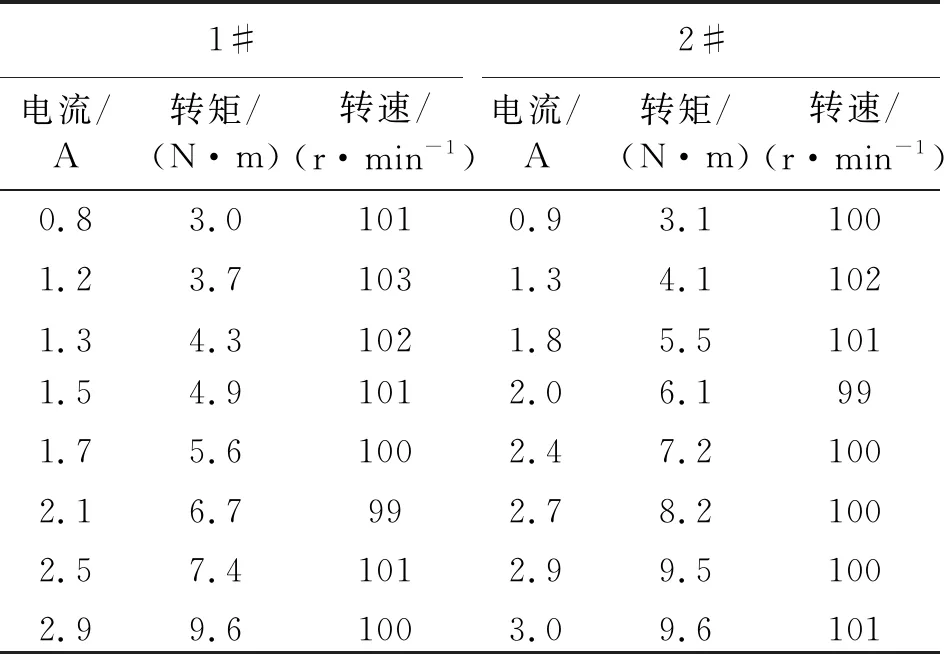
表2 100 r/min加载试验1
将转速稳定在300 r/min,对系统施加负载,试验电压均为48 V,测得试验数据,随机选择两组数据,记为1#和2#,如表3所示。试验结果可以看出,在100和300 r/min转速下施加负载,转速相对稳定,系统带负载能力较好。将100以及300 r/min的两组数据进行线性拟合,结果分别如图13,14所示,可以看出系统一致性良好。

表3 300 r/min加载试验1

图13 100 r/min数据拟合曲线Fig.13 100 r/min data fitting curve

图14 300 r/min数据拟合曲线Fig.14 300 r/min data fitting curve
将转速维持在300 r/min,突加最大负载,进行多次试验,测试电压均为48 V,测试系统过流保护能力,结果如表4所示。由结果看出,设计的双闭环控制系统在施加负载过程中,由于过载触发了过流保护电路,电机转速明显下降,有效保护系统。对被测系统进行堵转试验,电机运转速度为0 r/min,堵转最大转矩为28 N·m,系统正常运行,未出现故障。

表4 300 r/min 过流保护试验
3 结束语
笔者研究了电动轮式小车用轮毂电机控制系统的负载驱动特性,并对其进行了可靠性试验,从硬件和软件两方面对无刷直流电机的控制器进行设计、调试和试验,改善无刷直流电机运转时的性能。系统在不同负载下启动性能良好,启动电流为1 A,在不同负载下维持稳定速度运行,当过载导致电流过大时,触发保护电路有效保护系统,堵转运行时最大转矩为28 N·m,堵转试验后系统未出现异常。结果表明,设计的无刷电机驱动控制系统带负载能力良好,稳定性高,安全可靠。
