灵敏度和偏移补偿的MEMS 压阻式加速度传感器*
2019-11-06侯倩萍
侯倩萍,常 京
(1.四川工程职业技术学院,四川 德阳 618000;2.北京理工大学自动化学院,北京 100081)
0 引言
随着微电子制造技术的发展,基于低成本微机电系统(Micro Electro Mechanical System,MEMS)的传感器也得到了迅速发展[1]。这些传感器大都是压阻式和惠斯通电桥类型的,如压阻式加速度传感器、压力传感器、霍尔传感器、应变仪(变形测量器)以及各类生物医学传感器等。传统的惠斯通电桥常被用来降低传感器的偏移。但非标MEMS 制造工艺和压敏电阻对温度的依赖特性往往会导致一些问题出现。其中一个问题就是传感器的灵敏度直接是桥偏置电压的函数。由于商用CMOS 工艺的偏置电压是逐渐减小的,因此,这种传感器灵敏度和CMOS尺寸之间的权衡结果是妨碍MEMS-CMOS 一体化的因素之一;另一个主要问题就是传感器的灵敏度和偏移量是温度和动态特性的非线性函数,这些函数涉及传感器很多的指标,而且随着传感器老化而变化,所以很难找到一个准确的广义函数用于传感器灵敏度和偏移的建模。虽然传感器可以检测到非常微弱的激励,但其输出电压也非常小,往往是几微伏的量级。这个很小的输出电压必须被放大到一个合适的量级,才有进一步数字化的可能,并使信号对CMOS 电路的偏移不敏感;再次,大多数生物医学和其他物理信号的频率小于5 kHz,对于这个频率范围来说,1/f 噪声比热噪声更重要。因此,一个高增益、低偏移、低噪声CMOS 放大器必须用来放大传感器的输出。CMOS 偏置电压的逐渐递减使得采用可变增益拓扑来适应传感器的整个动态范围成为必要;大体上有3 种类型的电路拓扑结构用于偏移和1/f 噪声的动态降低[2-3]。将这些拓扑结构的2 种或3 种结合起来可得到最佳结果;还有各种各样用于低偏移和1/f 噪声的混合拓扑结构报道,如低至100 nV 的输入偏移[4],但这些拓扑结构都有或者很低的系统带宽,或者很低的动态范围[5-6];早在20 世纪80 年代,就提出了针对传感器灵敏度和偏移量对温度依赖性进行校正的方法,如文献[7]提出采用专门的设备,文献[8]提出通过调节桥的电源。但这种补偿不是动态的,而且精度很差;在20世纪90 年代,又提出采用第2 个无源桥进行补偿[9];后来的数字技术用来存储灵敏度和偏移数据,然后用于传感器补偿[10]。但其非动态补偿、高成本和繁琐的校正过程仍然是主要缺点;也有一些非常独特的补偿方法提出,如采用1 μm CMOS 工艺组装和可编程门阵列和在线进行数字处理及校准的校正算法[11]、基于电涡流效应的自动导引车(Automated Guided Vehicle,AGV)导引传感器[12]和用一些其他的模拟信号处理技术[13]。但这些技术都忽略了灵敏度的变化,而且MEMS 工艺与具有小形体尺寸的商用CMOS 工艺的相容性根本没有被解决;还有一些算法如基于神经网络算法的补偿[14-16]尚未在商用CMOS 工艺中实现。
对此,本文提出了一种完全在片、完全模拟和通用的接口电路来解决上述问题,使得采用商用CMOS 工艺把MEMS 传感器集成为一种低成本智能MEMS 传感器变得更加容易。
1 传感器和接口电路体系结构
本文实现的MEMS 传感器由一个传感器和一个总的接口电路构成。传感器是一个单轴、四束、压阻式传感器,设计为13 g 的加速度范围和低偏轴灵敏度;总的接口电路分为两部分,一部分由一个低偏移、低噪声、可变增益的、一个带有峰值检测器的测量放大器和一个增益控制电路构成。另一部分由传感器灵敏度和温度偏移补偿电路构成,无需任何独立的温度传感单元,该电路就能动态地补偿传感器灵敏度和偏移量对温度依赖的非线性特性;时序控制模块产生全部时钟信号,一个具有自动防故障性能的三重模块冗余偏置发生器模块产生全部的偏置电压和电流。主放大器(第1 部分)和灵敏度/偏移温度补偿电路(第2 部分)的总体框图分别如下页图1 和图2 所示。
主放大器是两个低偏移、低噪声拓扑结构的组合,即斩波器和乒乓自动调零技术,它的两个并行分支的每一个都是自动调零的,而且整个放大器被内置在一对斩波器中。斩波频率为100 kHz,自动调零技术防止放大器由于自身偏移而变饱和,因为每个放大器的输入偏移要乘以该放大器的闭环增益。这种混合实现结构提高了嵌套斩波放大器的严格带宽限制,而且乒乓自动调零提供了连续时间输出(无信息丢失);每个分支又由4 个级联放大器构成,第1 个放大器是一个固定增益的运算放大器,其余为可变增益的。输入信号被输入斩波器调制(如图1 中的Cch是斩波时钟),然后被级联运算放大器放大;输出斩波器又把信号解调到它原来的频率,并调节偏移和1/f 噪声在100 kHz 左右。自动调零开关工作在12.5 kHz(如图1 中的Caz)。
然后,采用2 种类型的低通滤波器(Low Pass Filter,LPF)来滤除已调制的偏移和1/f 噪声。第1 个LPF 是一个二阶微分输入-微分输出、具有截止频率10 kHz 的连续时间(采用片上集总电阻和电容器)滤波器,后面接的是3 级二阶、微分输入-微分输出、可变截止频率的开关电容LPF(Switched Capacitor LPF,SCLPF)。滤波后的输出被馈送到一个峰值检波器电路(Peak Detector Circuit,PDC);随后,由PDC 生成2 位数字信号,而且设计一个有限状态机(Finite State Machine,FSM)来改变放大器的增益。

图1 主放大器框图

图2 灵敏度/偏移温度补偿模块
本文提出的低成本传感器灵敏度和温度偏移补偿电路,可动态补偿非线性灵敏度和偏移量的温度依赖性。在该补偿方案中,把可变电流用来偏置电桥,而不采用电压,这样就可消除在传感器灵敏度和CMOS 尺寸之间必须进行权衡。传感器灵敏度是通过改变桥的偏置电流(Ib)进行控制,而且采用一个反馈回路把桥的偏置电压(Vb)固定到所需要的值,这个值可以从外部进行设置;在Vb保持不变时,Ib随温度变化;精度通过使用一组25 个外部微调电阻来得到提高;在第一级后的主放大器的原始输入信号中减去计算得到的偏移量;在该系统中,不需要使用单独的温度传感器来测量工作温度,而是采用各种中间传感器的电压来得到温度信息。
2 具体构建模块的设计
2.1 传感器
传感器结构由8 个硼扩散结晶体压敏电阻(Piezoresistor,PZR)、4 个臂、1 个校验块和1 个支撑架构成。4 个臂支撑起校验块。在每个臂上,两个PZR 位于最大应力区,即一个靠近校验块,另一个靠近支架。传感器可以感知沿z 轴的加速度,把这个加速度称为在轴加速度,另外两个轴称为偏轴(x 轴和y 轴)。这些PZR 连接起来构成一个惠斯通电桥,用于感知加速度。每个PZR 设计成有一个1.5 kΩ的标称电阻和2 Ω/g 的PZR 灵敏度。为了得到在27 ℃时1 mV/g 的灵敏度,Ib设置在250 μA。
2.2 自动调零放大器
把一个采用NMOS 输入对和自动调零功能的单级折叠射-基运算放大器用于每个支路4 级的每一级,如图3 所示。在自动调零时钟存储阶段(当Caz很高时),运算放大器的输入端子被短接到输入共模电压,而且输出偏移电压被存储在电容C1和C2中;在校正阶段(当Caz很低时),输入端连接到信号,而且这两个电容从各自的输出断开。晶体管M3和M4基于输出偏移电压的大小和极性通过M7和M8调节电流。
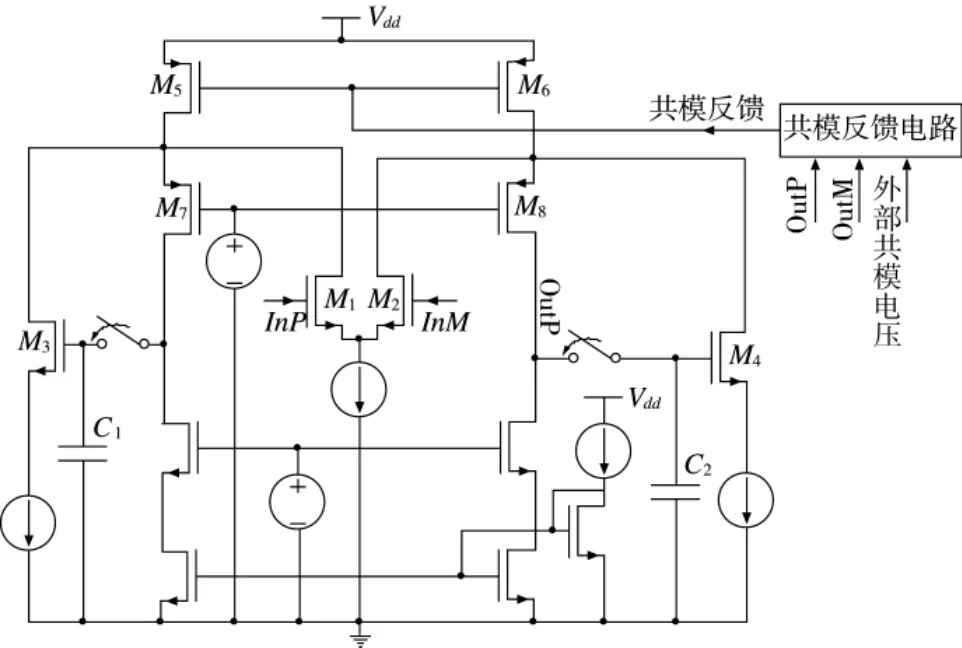
图3 自动调零放大器
校正后的残余偏移量计算如下:

式中,Voffset1、Gm1和R 分别为主放大器的输入参考偏移量、跨导和负载阻抗,Voffset2和Gm2分别为辅助放大器的输入参考偏移量和跨导。共模反馈(Common Mode Feedback,CMFB)电路用来得到输出共模电压。
2.3 开关电容低通滤波器
三级相同的SCLPF 级联在一起,每一级的实现如图4 所示。第3 级SCLPF 的运放用来驱动一个高达40 pF 的负载电容。两个非重叠时钟(如图4 中的clk 和clkNO)用于每个SCLPF。片上电容C1、C2、C3和C4的 值 分 别 为1 pF、2 pF、375 fF 和500 fF。SCLPF提供采样输出,这个采样输出可直接连接到一个ADC,后接接口电路。

图4 开关电容低通滤波器
2.4 峰值检波器
基于二极管和电容器的峰值检波器(Peak detector,PD)实现如图5 所示。RLCL的值由用户选择,根据下列关系:

式中,ωc是加速度的角频率,ωm是加速度幅值的最大变化的角频率。
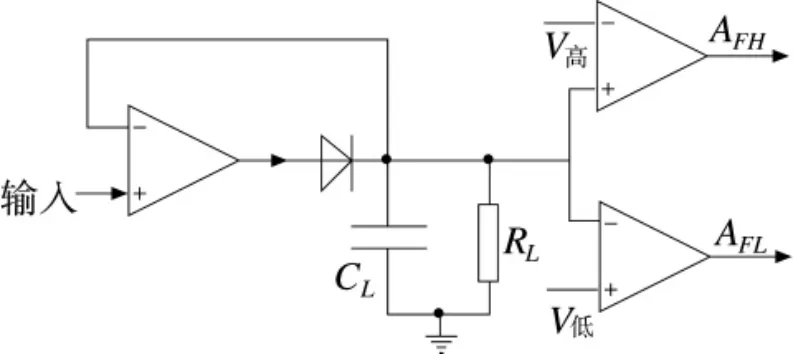
图5 峰值检波器
PD 得到一个与输出电压幅值成正比的直流电压,随后与输出电压幅值的上限值(VH)和下限值(VL)比较,得到两位数字信号(AFHAFL)。
2.5 增益控制电路

图6 FSM 状态转移图
对于全部增益频带来说,输出电压限制在200 mV~1 V(峰-峰值)。增益控制有限状态机(Finite State Machine,FSM)的信号状态图如图6 所示。FSM用最大增益设置(图6 中的X5)来初始化。从FSM得到一个6 位的数字信号,这个6 位的数字信号用来改变主放大器的第2~4 级的增益。
2.6 传感器灵敏度补偿电路
传感器灵敏度是温度的非线性函数。每个惠斯通电桥的电阻可以表示为:

式中,Rs是在0 ℃时的电阻,(s)是应力函数,Γ(T)是温度的函数。根据惠斯通电桥工作的基本原理可知,Vb仅是温度的函数,输出电压Vo是温度和应力的函数,同时Vo中还有一个附加的偏移项Voffset-actual,Vb、Vo分别为:

传感器的灵敏度为:

让Vb(T)固定在Vb(27 ℃)不变,可得到一个不变的灵敏度∂V0/∂g(s,27 ℃),可以用一个负反馈电路来保持Vb固定不变。从理论上讲,通过使用一个高开环直流增益补偿回路,可以把补偿误差降低到一个非常低的值。但在实际实现中,误差受CMOS电路偏移量的限制,可以通过减少各种偏移量来减少这个误差。
2.7 传感器偏移补偿电路
电阻制作中的不匹配和PZR 的温度系数都会产生一个非线性温度依赖性偏移量。对于一个由Ib驱动的惠斯通电桥来说,实际偏移量为:
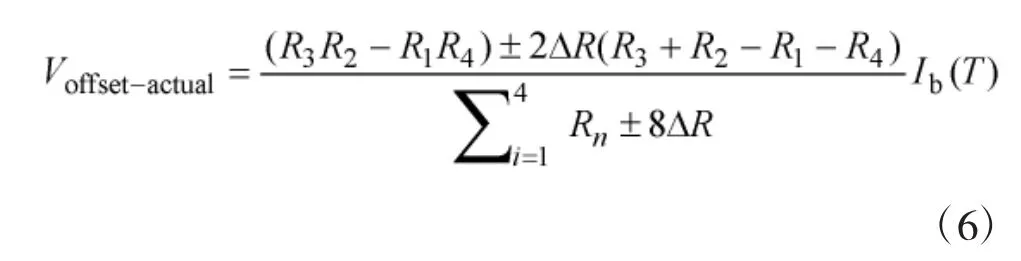
式中,R1=R1f+R2f,R2=R3m+R4m,R3=R1m+R2m,R4=R3f+R4f,ΔR 是由于温度变化带来的电阻变化。在室温(27 ℃)时,ΔR 为零。Ib(T)是温度依赖桥偏置电流,由下式给出:


式中,VRi表示跨接在第i 个臂上的电阻Ri上的电压,最后得到Voffset-corrected如下:

式中,A0是主放大器第一级的增益。
3 实验结果
为了对本文设计的MEMS 压阻式传感器的在轴和偏轴加速度灵敏度进行测试,采用250 μA 偏置电流和在±13 g 的加速度范围内,单独的加速度在轴和偏轴灵敏度得到的实验结果如图7 所示。从图7 中可得到在轴(即沿z 轴)0.9 mV/g 的灵敏度,而沿x 和y 轴的偏轴灵敏度分别仅为0.8 μV/g 和0.7 μV/g。
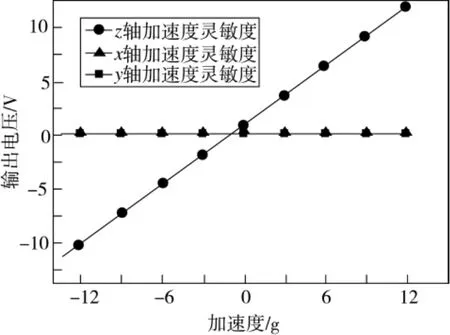
图7 传感器加速度的在轴与偏轴灵敏度仿真结果
为了对传感器的偏移补偿效果进行验证,考虑在输入对(M1-M2)、自动调零对(M3-M4)和每个放大级的CMFB 均有10%的失配、全部LPF 输入对有10 % 的失配、传感器的PZR 在其标称值附近有10 %的失配情况下来仿真对随机偏移的影响,把一个幅值(峰-峰值)为1 mg、频率为5 kHz 的加速度应用于传感器,得到的MEMS 压阻式加速度传感器的输出电压如图8(a)所示,图8(b)为输出电压的快速傅里叶变换(Fast Fourier Transform,FFT)。图8(b)的频谱表明,有24 mV 的输出偏移和很低的谐波成分。
为了对灵敏度补偿效果进行验证,对灵敏度补偿回路设置一个60°的相位裕量、385 kHz 的单位增益带宽(Unit Gain Bandwidth,UGB)和85.2 dB 的开环直流增益。对采用补偿回路和无补偿回路情况下的Vb变化(设在27 ℃附近有±75 ℃的温度循环和100 MHz 频率)的仿真结果如图9(a)所示,图9(b)所示为在相同温度变化情况下的Ib在250μA 附近的变化。从图9(a)可见,采用补偿回路情况下的Vb变化在30 μV 以内,这相当于一个0.05 ℃的温度误差,而无补偿回路情况下的Vb变化在1 mV 内,灵敏度明显远远低于前者,说明本文设计的灵敏度补偿回路能很好地提高传感器的灵敏度指标。
为了验证温度变化对偏移的影响,设置温度在-125 ℃~125 ℃之间变化,下页图10 所示为校正前偏移(Voffset-actual)和校正后偏移(Voffset-corrected)的偏移估计误差。从图可见,校正前的偏移估计误差变化从-500 μV 到300 μV,校正后的偏移估计误差减少到了±10 μV 以内。

图8 传感器的输出电压及FFT

图9 Vb 和Ib 随温度的变化
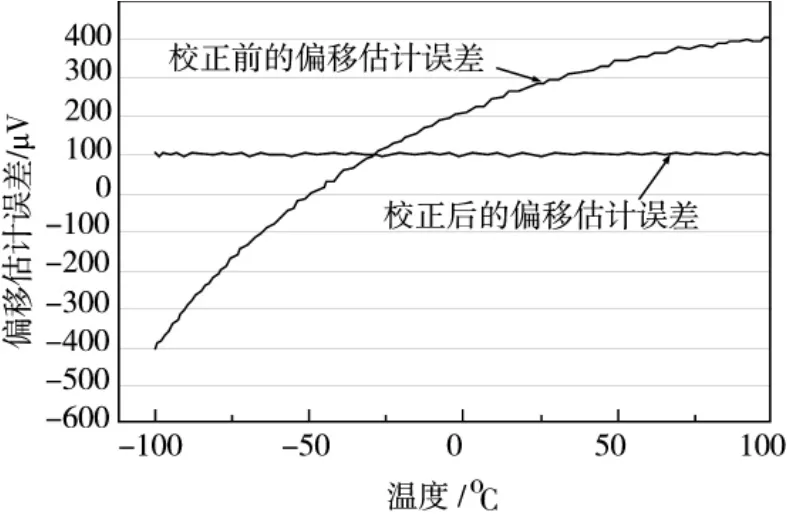
图10 校正前和校正后的偏移估计误差比较
4 结论
本文提出了一种完全模拟的、低偏移的和可变增益测量放大器的智能MEMS 压阻式加速度传感器。可以得到一个输入参考偏移小于200 nV(假设有10%的压敏电阻和CMOS 工艺失配)和低谐波失真的输出电压。实现了一种用于传感器灵敏度和偏移量对温度依赖性的动态和非线性补偿方案。这种方案可用于电阻式惠斯通电桥类传感器。灵敏度补偿误差在0.05 ℃左右,偏移估计误差小于±10 μV。
