基于网络环模型的CEC 协同网络鲁棒性研究*
2019-11-06滕克难杨春周
滕克难,杨春周,陈 健
(海军航空大学,山东 烟台 264001)
0 引言
在协同作战能力(CEC)网络支持下,舰艇编队中不同平台上的舰空导弹武器系统的作战节点,如探测跟踪、指挥决策、火力打击,与舰艇平台逻辑分离,形成了多个从“传感器到射手”的超视距反导拦截打击链,构成了一个复杂的协同作战装备体系。网络的鲁棒性指在激烈的攻防对抗环境下保持CEC 网络协同特性的能力。保持CEC 协同作战网络鲁棒性,提高舰艇编队CEC 网络在海上激烈的攻防对抗环境下的稳定性,是当前舰艇编队协同作战核心问题之一。
1 网络环模型
1.1 定义
网络环模型,也称为分布式网络化作战的模型,主要包括传感器节点(S)、决策节点(D)、响应节点(I)及目标节点(T)等4 种描述作战过程的基本节点,代表着作战体系中的基本作战资源,如图1 所示。
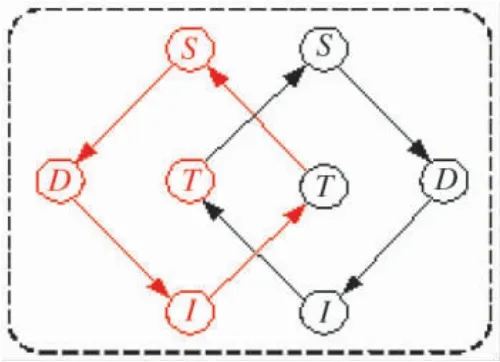
图1 网络环模型图
对应图1 所示的基于CEC 网络的超视距协同防空反导装备体系中的基本作战节点,它们的具体含义如下:
1)传感器节点(S:Sensor):代表着探测跟踪节点,描述了舰载雷达、光电设备和预警机等装备的特性,用于接收来自目标节点(T)的可观测信息,并把这些信息发送到决策节点(D)。
2)决策节点(D:Decision):代表着指挥决策节点,描述了舰载指挥与火力控制系统的特性,用于接收来自传感器节点(S)的信息,并对当前及将来其他节点的部署和行动安排作出决策。
3)响应节点(I:Interact):代表着火力打击节点,描述了舰空导弹发射控制系统的特性,它接收决策节点的指令,并发射、制导舰空导弹飞向目标节点(T),拦截击毁目标。
4)目标节点(T:Target):代表着空袭目标节点,描述了空袭飞机和反舰导弹的特性。
为了表征红蓝双方对抗,将红方代表舰艇编队防御方,记作R;蓝方代表空袭方,记作B。则网络环模型中红方节点为:R(S)、R(D)、R(I)、R(T),蓝方节点为:B(S)、B(D)、B(I)、B(T)。
1.2 3 种典型的协同作战网络
1.2.1 无打击能力网络
无打击能力网络是指网络中的节点之间存在有向链接,但不能形成协同作战回路,如图2 所示,蓝方目标B(T)节点与红方响应节点R(I)之间的有向链接,寓意是蓝方来袭反舰导弹击毁了红方舰空导弹的发射装置,导致了红方无法形成“传感器R(S)→决策R(D)→响应R(I)→目标B(T)”打击链,也就谈不上协同作战了。

图2 无打击能力网络示意图
1.2.2 单一打击能力网络
单一打击能力网络称为简单作战网络,如图3所示,红方形成“传感器R(S)→决策R(D)→响应R(I)→目标B(T)”打击链,没有考虑协同作战,也没有考虑红-蓝双方的对抗。
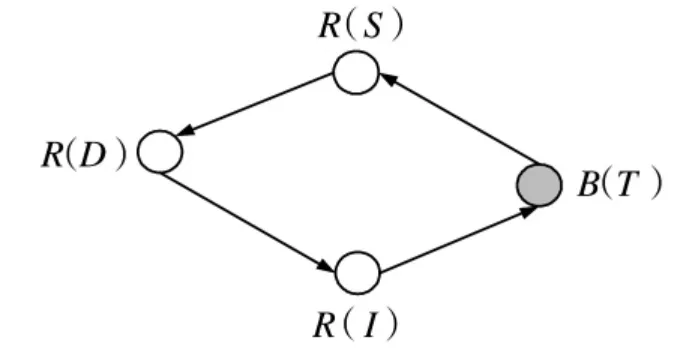
图3 单一打击能力网络示意图
1.2.3 协同攻防作战网络
在协同攻防作战网络中,红-蓝双方作战节点组成具有对抗特征的网络,称为复杂作战网络,如图4 所示,红-蓝双方均包括传感器节点(S)、决策节点(D)、响应节点(I)和目标节点(T),8 个节点之间共有11 个网络链接。具体含义:一是红方传感器R(S)不仅发现了蓝方目标B(T),而且还发现了自己的目标R(T),这就需要决策节点R(D)对B(T)和R(T)两个目标进行识别;二是蓝方传感器B(S)不仅探测红方目标R(T),而且将红方的响应节点R(I)也作为目标进行探测,并通过作战网络环指挥响应节点B(I)对红方响应节点R(I)实施攻击。

图4 协同攻防作战网络示意图
需要注意的是,在作战节点数一定的条件下,如果节点之间的链接数量增加,表示红-蓝双方对抗的规模发生变化时,网络的复杂性也就随之增加。
2 协同作战网络鲁棒性评价模型
2.1 协同作战网络的邻接矩阵A 描述方法
邻接矩阵A 是一个n 阶方阵,并具有两个重要性质:1)邻接矩阵不一定是对称的,而且对角线也不一定为零;2)在作战网络中,顶点i 的出度为第i行所有元素的和,而λ 度为第i 列所有元素的和。因此,邻接矩阵A 可以表示作战网络中各个节点之间的链接关系。
作战网络的邻接矩阵构建方法:1)n 等于红蓝双方对抗作战网络中的节点数;2)矩阵A 的行、列按照“先红方、后蓝方”的顺序排列;3)红-蓝双方的节点按照传感器节点(S)、决策节点(D)、响应节点(I)和目标节点(T)的顺序排列。4)在邻接矩阵A中,作战节点i 的入度,在第i 列的“有向相连”相应行填写“1”,否则为“0”;作战节点i 的出度,在第i行的“有向相连”相应列填写“1”,否则为“0”。图4所示的协同攻防作战网络相对应的邻接矩阵A,如表1 所示。
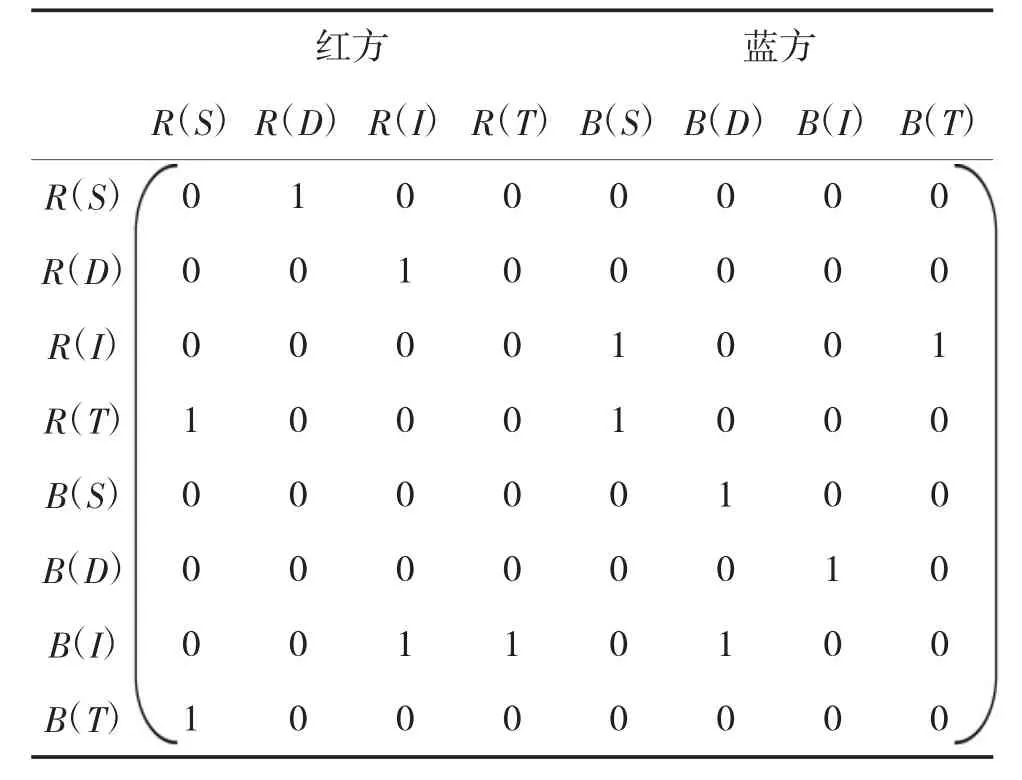
表1 协同攻防作战网络的邻接矩阵
2.2 协同作战网络鲁棒性评价指标λMAX
根据Perron-Frobenius 定理可知,非负矩阵存在等于谱半径的特征值,且存在与之相对应非负特征向量。设A 是不可约非负矩阵,则A 总有一个非负的特征值λ,它是特征方程的单根,而所有其他特征值的模都不超过λ。因此,把大于所有其他特征值的、非负实数特征值,叫作最大特征值,记为λMAX。
对于协同作战网络的n 阶非负邻接矩阵A 而言,可以得到以下结论:
1)邻接矩阵A 表示协同作战中的网络链接关系,它是一个n 阶非负方阵;
2)邻接矩阵A 的最大特征值λMAX,既表示了网络中各个节点之间的链接关系,也反映了作战节点在作战中的静态特性;
3)当协同作战网络中的节点损坏,或节点之间相互链接断边,以及网络进行重组等情况下,其邻接矩阵A 将发生变化,其最大特征值λMAX也将随之发生变化。可见,邻接矩阵A 的最大特征值λMAX变化还可以反映协同作战网络的鲁棒性。因此,选择邻接矩阵A 的最大特征值λMAX作为协同作战网络的鲁棒性评价指标。
2.3 3 种典型的协同作战网络最大特征值λMAX 的含义
3 种典型的协同作战网络邻接矩阵A 的特征值λ 和最大特征值λMAX的计算结果,如表2 所示。
从表2 得出结论:对于一个协同作战网络,当其邻接矩阵A 的最大特征值等于零,即λMAX=0,则这个网络称为无打击能力网络;当网络邻接矩阵A的最大特征值等于1,即λMAX=1,则这个网络称为单一打击能力网络;当网络邻接矩阵A 的最大特征值大于1,即λMAX>1,则这个网络称为协同攻防作战网络。
3 协同作战网络鲁棒性仿真验证
为了分析协同作战网络鲁棒性,以3 艘舰艇为例,选择了“有/无CEC 网络支撑”两种协同反导作战网络进行对比研究。
3.1 无CEC 支持的协同作战网络

表2 特征值λ 和最大特征值λMAX 的计算结果一览表
假设编队由3 艘水面舰艇和1 架预警机组成,由于没有CEC 网络支持,预警机能够探测目标并提供早期预警信息,但各水面舰艇对空中来袭反舰导弹的探测、跟踪,以及对舰空导弹的制导控制必须依靠水面舰艇本身的雷达。这时,舰艇编队只能按照“平台中心战”的理念,“按扇区协同、按方向协同”方式,组织实施编队反导防御作战。
3 艘水面舰艇的舰载雷达传感器分别用S1,R、S2,R 和S3,R 表示,本舰相应的指控系统(即:决策者)分别用D1,R、D2,R 和D3,R 表示,舰空导弹武器分别用I1,R、I2,R 和I3,R 表示,而来袭反舰导弹用TB 表示。预警机的雷达传感器用SR 表示,而预警机上的指挥控制系统用DR 表示。
由于没有CEC 网络的支持,3 艘水面舰艇分别用本舰的舰载雷达传感器对来袭反舰导弹目标TB 进行探测,然后只能把目标TB 信息分别传递本舰相应的指控系统D1,R、D2,R 和D3,R,并由本舰的指控系统分别控制舰空导弹武器I1,R、I2,R和I3,R,对来袭反舰导弹目标TB 进行拦截打击。其作战网络的邻接矩阵具有12 个特征值,它们分别是:λ1=0、λ2=0、λ3=0、λ4=0、λ5=0、λ6=0、λ7=0、λ8=0、λ9=1.316 1、λ10=1.316 1i、λ11=-1.316 1、λ12=-1.316 1i。所以,其最大特征值λMAX=1.316 1。
3.2 基于CEC 支持的协同作战网络
在舰艇编队装备了CEC 网络的条件下,3 艘水面舰艇和预警机基于CEC 网络支持,形成了一个超视距协同反导作战网络。一是传感器S1,R、S2,R、S3,R 和SR 不仅可以对来袭反舰导弹目标TB 进行探测,而且它们之间可以通过CEC 网络实现信息共享;二是共享的信息又通过CEC 网络传递给舰载指控系统(决策者)D1,R、D2,R 和D3,R 以及预警机载指控系统DR;三是编队中的指控系统D1,R、D2,R、D3,R 和DR 均可以协同制导控制舰空导弹武器I1,R、I2,R 和I3,R,对来袭反舰导弹目标TB 实施拦截打击。

表3 最大特征值lamda1 和lamda2 仿真计算结果
值得强调的是,在基于CEC 网络的条件下,舰载传感器Si,R、指控系统Di,R 和舰空导弹武器Ii,R,以及机载传感器SR 和指控系统DR 等作战资源,均实现了与平台的“逻辑分离”,可以按照“网络中心战”的原理,完成网络化超视距舰空导弹协同反导任务。
该邻接矩阵具有12 个特征值,分别是:λ1=-1.529 6、λ2=4.529 6、λ3=1.500 0-2.162 9i、λ4=1.500 0+2.1629i、λ5=0、λ6=0、λ7=-1、λ8=-1、λ9=-1、λ10=-1、λ11=-1、λ12=-1。所以,其最大特征值λMAX=4.529 6。
3.3 仿真研究方法及结果分析
3.3.1 仿真研究方法
在网络化超视距舰空导弹协同反导作战过程中,防御的红方可能会遭到蓝方反舰导弹的打击,导致红方作战节点损坏(消失)或链接断开。为了描述在交战情况下协同作战网络节点的演化过程,采用该网络的最大特征值的变化,来描述网络的鲁棒性。
首先假定协同作战网络节点被随机损坏,断开网络中1~7 个链接,然后在有/无CEC 网络支持这两种情况下,分别有无CEC 支持的协同作战网络的链接进行随机切断,形成新的邻接矩阵A,计算得出新的最大特征值λMAX。计算结果如表3 所示,而最大特征值的演变趋势如图5 所示。

图5 网络特征值与链接损坏数关系图
3.3.2 仿真结果分析
在表3 中,lamda1 是基于CEC 支持的作战网络最大特征值计算结果,lamda2 是没有CEC 支持的作战网络最大特征值计算结果。显然,在没有CEC 支持的情况下,随着网络链接的切断,其最大特征值λMAX也越来越小。特别是当网络损坏3 个链接时,作战网络的λMAX=0.001 4,网络协同能力几乎瘫痪;当网络损坏4 个链接时,作战网络的λMAX=0,作战网络演变为“无打击能力网络”。
基于CEC 支持的协同作战网络,随着网络中链接的损坏,网络协同性能下降并不明显,表明网络的鲁棒性较强。
同理,当舰艇编队中作战平台数量增加,如4艘舰艇1 架预警机或5 艘舰艇1 架预警机,协同作战网络中的传感器、指控系统、舰空导弹武器等作战节点也随之增加,这时,协同作战网络的鲁棒性也随之增强,如图6 所示。当有分别以3、4、5 艘舰艇编队进行协同反导作战时,在有CEC支持的条件下,协同作战网络的鲁棒性分别是无CEC 支持条件下的3.5 倍、4.0 倍、4.6 倍。由此可见,随着作战平台和作战节点的增多,协同作战网络的鲁棒性显著增强,网络化协同反导作战能力作为舰艇编队战斗力的倍增器的效果也就越突出。
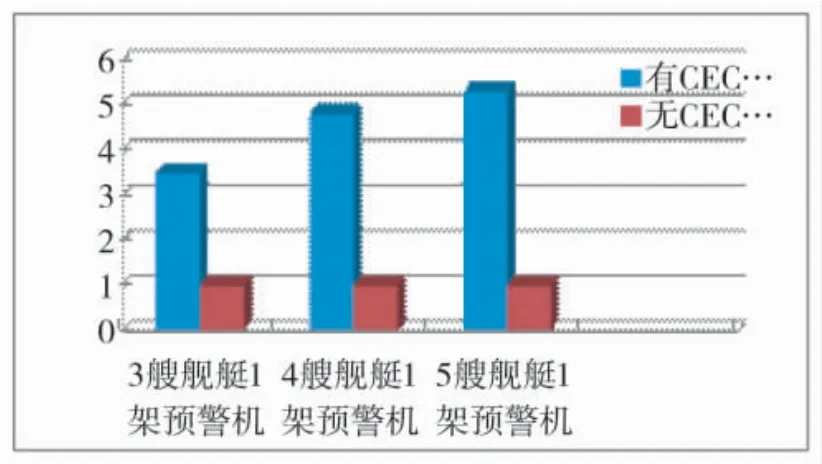
图6 有/无CEC 支持两种情况下舰艇数量增加协同网络鲁棒性比较分析图
4 结论
网络化协同反导作战能力是未来舰艇编队防御作战新型作战能力。在海上激烈的攻防对抗环境下,CEC 网络的鲁棒性至关重要。采用协同作战网络的最大特征值评价网络的鲁棒性是一种较好的方法,对于CEC 网络的设计与评估具有一定的指导意义。
