基于事件触发的船舶航向自适应控制研究
2019-11-06罗云霞蔡建平
王 薇,罗云霞,蔡建平
(1.河北地质大学数理学院,石家庄 050031;2.浙江水利水电学院电气工程学院,杭州 310018)
0 引言
船舶航向控制对船舶航行的安全性、可控性起着重要的作用,也影响到海洋运输事业的经济性。近些年来,随着控制技术的不断发展,越来越多的先进控制方法被应用于船舶航向控制,其中最具代表性的就是非线性控制方法的应用。这些先进方法的应用使得在线性系统模型中被忽略的船舶操纵运动的非线性因素,由航速、装载带来的非线性影响,以及由控制器的饱和非线性及非线性时滞带来的影响[1-2]均可在系统控制器设计中被完全考虑。特别是自适应反步法的引入[3-6],使得船舶航向控制系统中的未知系统参数以及由航行中风、浪、流等带来的外界干扰所引起的不确定性,均可通过自适应控制器的适应范围更加广泛,控制系统的精益参数估计的方法进行精确补偿,从而使控度、性能也得到了较大的提高。
纵观船舶航向控制的现有研究结果,均以连续控制信号输入为基础,即要求执行机构的输出信号是连续信号。这虽然可使作用于系统的输入更加精确,但由于控制信号自身的复杂性及执行机构的执行难度,使得执行效率大大降低,导致系统控制性能下降。本文从执行机构的实际要求及提高执行效率角度出发,提出了基于事件触发的船舶航向自适应控制的设计方法。首先在船舶航向的Norbbin 非线性模型中充分考虑参数不确定性。然后以反步法为基础,设计了控制器输入信号及触发事件,得到了基于事件触发的自适应控制器。该控制器可对未知参数进行在线估计。最后通过实例仿真验证了控制器的有效性。
1 系统描述
在船舶航向自动舵设计时,船舶操纵系统模型通常采用Nomoto 线性模型[7],但是Nomoto 方程是在小舵角和低频舵动的情况下推导出来的,具有较大的局限性,而非线性模型又非常复杂,为了改善模型的描述精度,本文的船舶航向控制系统采用Norbbin 非线性模型[8]




假设干扰为与系统有关的非线性函数,即满足如下假设:
控制目标为设计基于事件触发机制的自适应控制器,使得船舶的航向角可以收敛到设定的航向角,同时保证所有的闭环系统信号有界。
2 控制器设计稳定性分析
本节将给出设计控制器的步骤,并给出闭环系统的稳定性分析。首先,对系统进行坐标变换

其中,α1代表控制器的虚拟输入,其形式将在后面给出。对z1求导可得

取Lyapunov 方程

并令

其中,k1>0 为设计参数。则对Lyapunov 方程求导可得

对z2进行求导可得

接下来,给出一种基于相对阈值策略的事件触发控制方案。具体设计的控制方案如下:
首先定义

相应的触发事件设计为

给出如下定理及系统的稳定性证明,并且详细证明了该控制方案可以避免事件触发控制中的奇诺现象Zeno behavior[5]。

取Lyapunov 方程

计算可得

将式(20)和式(12)~式(13)带入到式(19)可得



可得
注1:在触发事件式(15)中,选取了一个动态变化的事件触发阈值,因而当控制信号u 的幅值较大时,控制信号将会维持较长的时间保持不变;而当系统状态趋向于平衡点时,控制信号也会较小,因而可以为系统提供精确的控制。
注2:事件触发控制的难点在于如何补偿由于事件触发机制引入的测量误差e。本文通过在控制器中引入tanh 函数,并且利用tanh 的性质补偿测量误差,避免了传统控制方案中的输入状态稳定的假设条件。
3 仿真
与文献[5]相同,为验证本文所设计的基于事件触发机制的船舶航向控制器的性能,考虑大连海事大学“育龙”号远洋实习船,该船长126 m,船宽20.8 m,满载吃水为0.618。
当该船以7.2 m/s 的速度航行时,方程中的船舶参数为:

仿真结果如图1~图3(168 页)所示,其中图1表明轮船的航向角可以快速收敛到设定值,图2 给出了控制信号,图3 给出了控制器任意两次更新时的时间间隔。通过仿真结果可知,本文提出的控制方案可以保证航向角可以快速跟踪设定值,并且信号控制信号更新的次数大大减少,系统的通信负担大大减轻。这些都表明了本文提出的基于事件触发控制机制控制器的有效性。
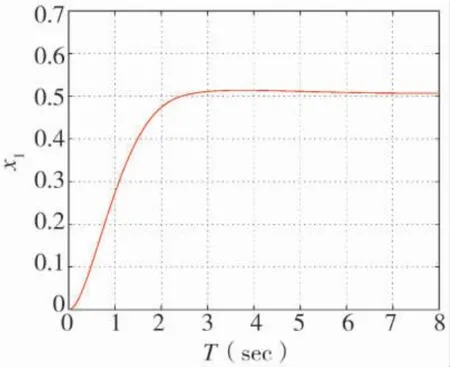
图1 航向角

图2 控制信号

图3 触发间隔
4 结论
针对一类船舶航向控制系统,从实际情况出发,充分考虑系统具有未知的常数参数,基于反步法设计了事件触发自适应控制器。该控制器不仅能保持系统稳定,同时实现了系统输出对参考信号的快速精确跟踪,提高了系统的性能。
