BIM+无人机技术在公路工程中的应用研究
2019-11-05马文安1李雍友胡晋华
马文安1 李雍友 孙 辉 胡晋华
(1.广西大学 广西 南宁 530000;2.广西路桥工程集团有限公司 广西 南宁 530011)
一、BIM+无人机技术简介
无人机技术主要是指以无人机为载体,通过搭载单一或多种传感器自动化、智能化地完成不同领域的信息采集的技术,而BIM是指建筑信息模型,广义的BIM则认为只要是包含工程信息的模型都应该被纳入为BIM范围之内。公路工程领域中的BIM+无人机技术主要是指通过搭载高精度相机,对项目工程现场进行航拍采集施工现场地形数据,并通过三维实景建模技术进行数据处理、生成具有精确平面及高程坐标信息且能直观反映工程现场施工进度信息的真三维模型的技术。通过无人机技术采集工程现场原始地形数据,再通过三维实景建模技术生成三维BIM模型,应用到公路工程项目上,能为现场施工及管理带来一定程度上的便利。
二、无人机倾斜摄影技术研究
(一)无人机倾斜摄影技术原理
无人机倾斜摄影技术是采用无人机搭载摄影设备,从多个方向拍摄采集地形数据,常用的摄影设备有单镜头、两镜头、五镜头相机,现阶段应用较广的有单镜头和五镜头相机,单镜头相机通过调节相机倾斜角度并进行井字形航带飞行可实现倾斜摄影,相机角度通常设为15~45度,倾斜摄影能够较好的采集到地形侧面的信息;五镜头相机通过将五个单镜头相机集成起来,一个镜头垂直向下,为正射镜头,另外四个镜头分别向前、向后、向左、向右倾斜45°,无人机飞行时,五个相机同时拍照,可同时采集到五个角度的照片信息,相比单镜头相机效率更高。将采集回来的倾斜摄影数据通过软件处理即可生成三维倾斜模型。
(二)无人机倾斜摄影作业流程
外业数据采集通过无人机搭载高精度相机,以飞行平台规划飞行航线,遥控无人机飞行航拍采集地形数据,具体实施步骤为以下两步:
1.控制点布设及测量
为保证生成的三维BIM模型,需要在测区现场布设少量控制点,布设像控点之前要做好准备工作,首先要检查航测区域的地质地貌条件,准备好油性喷漆、标靶板(木板或者做的硬纸板),如图1,像控点应选在印象明晰的地物点上,且像控点位置应当尽量平整水平,不要选在有高差的斜坡或边角上,对于带状测区,需要在测区的左右侧按“S”字型路线布设。

图1 现场控制点布设实例
布设好控制点后需要测量其坐标信息,测量设备通常使用GPS或者RTK,在进行坐标测量前,需要先确认坐标系、中央经线、已知点位置及坐标等测量参数,在设备上设置好相关参数后,找到一个以上已知点进行坐标校正,然后使用测量设备的点测量功能测出每个点相应的坐标信息。
2.地形数据采集
(1)在操作无人机开始作业前,先观察周边地形,选择空旷、平整、周边无高压线等信号干扰源的区域为飞机起降点,查看测绘区域是否有高压线、高山等复杂地形,确定飞行高度。
(2)在奥维互通地图上圈选测绘区域,从苹果的应用商店里下载DJI GS Pro,打开APP,左侧的列表是当前规划好的任务,右侧是调用的是苹果地图,在中国大陆的苹果地图也就是高德地图。我们接下来点击左下角的“新建”按钮来建立航测任务,如图2。这时出现三个选项,我们选择中间的这个,来对一个大片区域进行航拍,我们选择地图选点,根据地图显示的画面确定航测的方位和面积。

图2 航摄任务显示界面
(3)点击屏幕即可进行航线任务设置,软件会自动生成四个航点,通过拖动或增加航点,使航摄区域覆盖整个测区,设定好航摄区域后,根据项目对三维模型精度要求设置飞行参数,首先是飞行高度设置,飞行高度越低,采集到的地形照片位置精度越高,在合理布设控制点的情况下,通常飞行高度为100m左右可采集到精度1:500以上的地形照片;飞行高度为160m以内可采集到精度1:1000以上的地形照片;飞行高度为200m以内可采集到精度1:2000以上的地形照片。然后设置航向重叠率和旁向重叠率,为保证作业效率和模型精度,对于三维倾斜模型,重叠率设置为80%~70%为宜,对于正射影像,重叠率设置为80%~60%为宜。设置好云台俯仰角,倾斜摄影时一般为45°,正射为90°;设置好返航高度,确保返航时不会碰撞到障碍物。
(4)点击进入通用设置选项,如图3,点开中国大陆这个选项,不然飞行器的位置是偏移的。会导致航测任务区域整体偏移,有一部分任务拍摄不到。

图3 航测任务规划及通用设置
(5)检查任务没有问题后,点击右上角的飞机按钮,程序开始上传任务和自检,通过后就可以点击飞行了。整个任务过程都是全自动的,包括起降,任务完成后,左边菜单的任务变成一个旗子的标志证明任务已经完成。但是在整个飞行过程中需要密切关注飞机飞行状态,遇到紧急情况及时切换到手动模式用遥控器控制飞行状态。
由于无人机续航能力及图传距离限制,每个架次飞行只能采集3km左右地形数据,故对于长距离带状测区,需要进行多次作业,直至采集完整个项目的地形数据。
三、三维实景建模技术研究
(一)三维实景建模技术原理
随着计算机运算效率的提升和图形处理技术水平的提高,三维实景建模技术得到了越来越广泛的应用,三维实景建模是通过在二维图像上寻找多个特征点,获取特征点的坐标信息及在每张图象上的相对位置,然后通过有共同特征点的图像的相对位置进行有序排列,生成海量的点云数据,利用这些具有三维坐标的点云数据构建三角网曲面,最后在二维图像上提取到纹理信息赋予到三角网曲面上,即可生成三维实景模型。
(二)三维实景建模流程
无人机采集回来的是连续单独的照片,需要通过三维实景建模技术将分散的照片拼接在一起生成三维模型,主要步骤包括影像匹配、空中三角测量、密集匹配、构件三角网等。
1.影像匹配
影像匹配是通过寻找相邻两张照片重叠部分的相同特征点信息,数据采集时重叠率设置越高,影像匹配时图片丢失的可能性越小,SIFT特征匹配算法是现阶段最常使用的影像匹配算法,该算法运算速度较高,对电脑配置要求较低,在地形数据采集时,由于相机性能和现场环境影响,拍摄到的照片通常具有较多的噪点,该算法在处理噪点的能力上有一定优势,SIFT算法是将图像之间的匹配转化为特征点向量之间的相似性度量。SIFT特征匹配算法可分为三个阶段,第一阶段:检测图像;第二阶段:生成SIFT特征描述符;第三阶段:SIFT特征向量的匹配[1]。影像匹配流程图见图4所示。
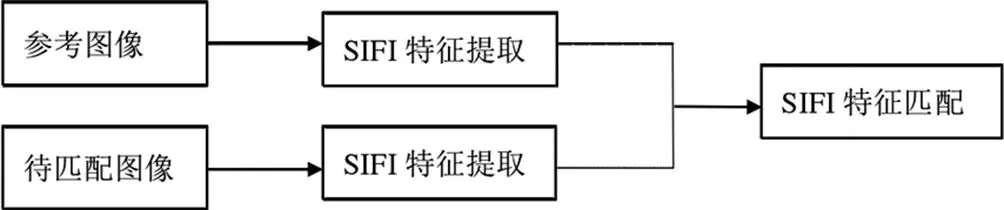
图4 影像匹配流程图
2.空中三角测量
外业采集到的影像自带有位置信息、角元素信息和相机参数等信息,空中三角测量是通过影像位置等信息,如图5,结合少量控制点坐标,通过求解影像的绝对位置信息,用于模型定位和定向。传统的空中三角测量方法首先需要通过外业测量采集到三个及以上在测区内均匀分布的已知点,然后基于已知点,通过共线方程求出测区内部影像的绝对坐标。目前无人机空中三角测量主要采用光束法区域网联合平差,以影像自带的pos数据及角元素信息作为平差初始值,和已知控制点坐标值进行联合平差,通过平差计算出测区影像的绝对坐标。
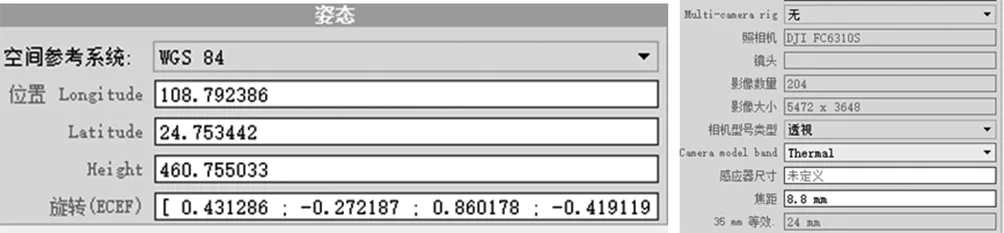
图5 影像基本信息
3.生成密集点云
生成密集点云是三维实景建模的关键技术之一,密集点云是基于空中三角测量计算完成后的数据,通过多视匹配技术将具有绝对坐标信息的影像拼接起来,由于无人机在作业过程中采集到的是多角度的照片信息,具有较多冗余点云信息,较多的冗余点云信息能够使得生成的点云精度更高;多角度拍摄也能减少测区盲点,提高盲区密集点云生成精度,此时生产出来的点云都具有精确的位置信息,相当于生产出了海量的具有三维坐标信息的点。
4.三角网构建
根据上述步骤生成密集点云数据后,可建立不规则三角网,点云数据密度越高,建立的三角网密度越高,越接近现场真实地形;在外业数据采集过程中,航拍影像重叠度越高,三角网精度也越高,现场地形条件复杂程度也会对三角网精度有一定影响。
5.纹理映射
纹理映射是建立三角网模型后,对模型进行纹理赋予的步骤。其本质是建立二维空间点到三维物体表面之间的一一对应的关系,在三维物体表面映射二维空间点对应的颜色,得到符合真实色彩视觉的三维模型[2-3]。映射的方式分为三种:正向映射、逆向映射和两步纹理映射法。其中,正向映射代表从纹理空间向屏幕空间的映射。它对空间很节省,但是容易存在空洞和图像扭曲的特点。与之对应的逆向映射弥补了正向映射的缺点,但是占用的存储空间要比正向映射空间大很多。而两步纹理映射法是针对无参数化曲面纹理映射问题提出的,主要涉及纹理映射的图片、纹理映射的坐标与纹理图片三者之间的关系。
在生产项目建立实景三维模型时,通常借助smart 3D等三维建模软件,在smart 3D软件中,通过完成新建工程、导入影像提交空中三角测量、新建重建项目等操作即可生成实景三维模型。
四、应用案例
(一)项目概况
融水至河池高速公路是广西高速公路网“横2线”桂林至河池交通路线支线的重要构成路段,主线全长105.605公里,本项目共设特大桥1622.5m/2座,大桥10919.5m/46座,中桥1489m/20座,桥梁长度占路线总长的13.286%,涵洞267道,通道206道,平均每公里涵洞通道4.48道,分离式立交2314.5m/19处,天桥23座;互通式立交7处。
(二)形象进度展示
工程施工进度是工程项目的三大目标之一,是工程项目管理的重要组成部分。合理的、科学的、讲求效率的工程项目施工进度是保证工程项目目标控制得以实现的前提[4]。传统的工程施工进度管理方式是通过现场反馈工程施工进度情况,及时性和真实性有待商榷,若能有一个能展示整个工程项目施工情况的真实三维地形模型,则可方便的查看现场施工进度情况,整个工程现场施工进度情况一目了然,真实又形象。
本文通过无人机倾斜摄影技术采集地形数据,然后通过软件处理生成真三维模型,进行形象进度展示,实施流程如下:
1.外业地形数据采集
无人机外业数据采集所用无人机型号为大疆精灵4,飞行过程中航线参数设置分别为:飞行高度保持在120m定高飞行,航线旁向重叠率为70%,航向重叠率为75%,相机角度为45°斜向下,等距间隔拍照,无人机飞行速度为8m/s。两名作业人员经过7个工作日的作业采集到了项目全线的地形数据,带宽为200m左右,共采集到照片12474张,现场沿施工线路布设控制点个数为197个,如图6,由于项目采用的是xian80坐标系,中央经线为108度,故用RTK采集控制点坐标值时,设置坐标系为xian80,108度带,并在现场找已知点进行坐标校正,校正完成后采集到每个点的坐标值。

图6 航测线路规划及控制点布设
2.地形数据整理
由于工程数据量庞大,将无人机现场采集完地形数据后,需要对数据进行分类整理,在照片中找到控制点位置,并标识出来,与现场布设及采集的控制点名称一一对应起来,如图7,方便后期数据处理生成三维模型:

图7 内业数据整理
3.三维模型建立
本项目使用smart 3D软件进行实景三维模型建立,首先建立融河路工程,在工程里按分部新建区块,共分为1-5分部5个区块,然后分别导入影像,检查影像信息无误后提交空中三角测量,计算完成后根据现场采集回来的控制点进行刺点操作,刺点完成后再次提交空中三角测量,对影片位置进行平差计算,然后提交生产项目生成三维模型,生成后的部分三维模型在3D viewer模型查看器中展示效果如图8:
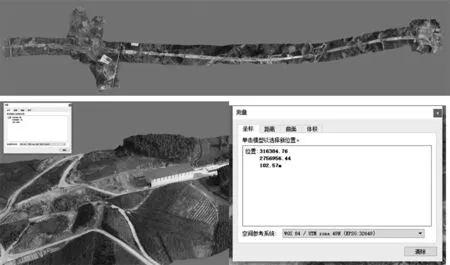
图8 三维模型
通过上图可形象真实的看到现场施工进度情况,对于全线106km的三维模型可进行局部放大缩小,可快捷方便的查看控制性工程的施工进度情况,且可通过软件自带的坐标查看功能查看任意点的真实坐标、两点间的距离、任意区域的面积和体积等信息,极大的方便了工程管理人员对现场施工情况的了解。
(三)指导征地拆迁
征地拆迁一直以来是工程施工前期的重难点问题,土地是老百姓赖以生存的依托,传统的地形图不能真实形象的展示出需要征拆的区域,老百姓有时了解不到位,而通过无人机航拍技术采集到的影像生成正射影像,同时把征拆红线导入到arcgis软件中,可直观的看出需要征拆的房屋、林地、水田等等,老百姓也能对征拆情况一目了然,且工程全线征拆情况都在一张图上清楚的反映出来,方便征拆管理人员直观的了解征拆进度。
生成三维模型后,在smart 3D软件中可进一步生成正射影像,然后分别将正射影像和施工红线导入到arcgis软件中,可方便的查找到施工红线内需要征拆的房屋及林地等,征拆人员无需到施工现场即可了解需要征拆的房屋及林地等数量,如图9,为征拆工作的开展提供了便利。

图9 征地拆迁范围
五、本章小结
本章简单介绍了无人机技术的原理,包括外业数据采集的倾斜摄影技术和外业数据采集主要流程,同时介绍了生成BIM三维模型的三维实景建模技术,及实际项目中用smart 3D软件建立三维模型简要流程。本章通过BIM+无人机技术建立的三维模型,在公路工程项目中进行了简单应用研究,主要的应用点包括两个方面:(1)进行施工进度形象;(2)施工前期指导征地拆迁。通过这两个方面的应用,为管理人员更有效的管理工程现场施工进度提供了便利,有效提高了工程施工效率,降低了生产成本。
