智能无人飞行器技术发展趋势综述
2019-10-31符文星
符文星,郭 行,闫 杰
(1.西北工业大学无人系统技术研究院,西安 710072;2.西北工业大学无人系统发展战略研究中心,西安 710072)
1 智能无人飞行器内涵及特征
基于未来战争深度信息化、智能化、无人化的特点,无人作战相关概念和技术迅速发展[1]。近年来,民用和军用无人机的产业规模和市场价值显著增长,成本和功效的优势不断突出,如何更好的把无人飞行器应用于现代战争成为备受关注的研究热点。结合人工智能、云计算与大数据等新兴前沿热点,无人飞行器未来将向智能化、集群化方向发展。
智能无人飞行器是由无人机、导弹等无人平台及其有关设备组成的有机整体,具有感知、学习、决策等智能特征,是可自主完成预期使命任务的无人飞行装备。智能无人飞行器最重要的两个特征是自主性和智能化,人工智能作为智能无人飞行器的关键技术之一,可显著提升其自主性能力和智能化水平。
2 智能无人飞行器项目研究现状
2.1 智能无人飞行器的智能自主能力评价
美军采用自主控制等级来评价无人飞行器的智能化水平并将其分为10级,其中1~4级描述个体的智能化程度,5~10级描述群体的智能化程度[2]。随着智能化水平的提升,无人飞行器由遥控制导向完全自主进化,由个体自主向群体完全自主发展,由模拟人的个体属性向模拟人的社会属性发展[3]。
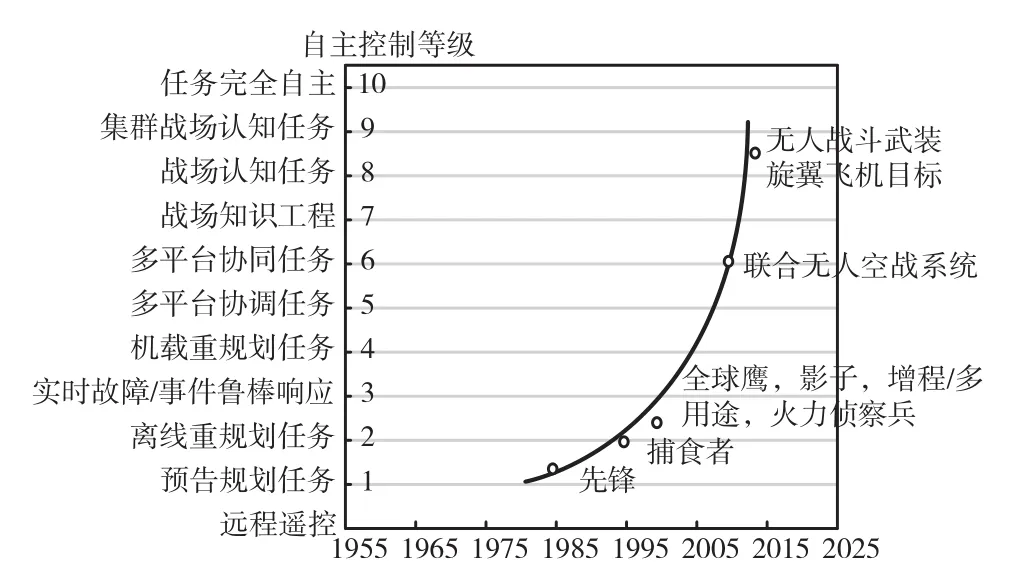
图1 美军无人飞行器自主控制等级Fig.1 Autonomous control level of US unmanned aerial vehicles
在美国无人军队理念中,新型的自主分析方法把自主性分为三级:第一等级是半自主操作,即人在回路内,目前大多数无人飞行器在执行任务过程中均需要人在回路来完成半自主控制;第二等级是监督式自主操作,即人在回路上,无人飞行器必须具有一定的自主感知、决策和执行能力,人可以监督运行并进行干预;第三等级是全自主操作,即人在回路外,无人飞行器需要进行自主感知、决策和行动,人在回路外对运行质量进行评估并改进[4]。
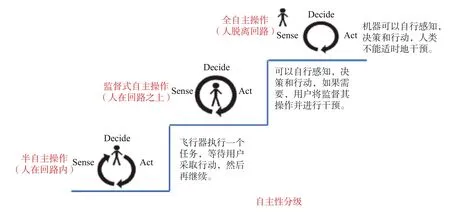
图2 美国无人军队理念的自主性分级Fig.2 Autonomy classification of the idea of US unmanned army
2.2 美国智能无人飞行器项目研究进展
美国国防预先研究计划局(DARPA)、航空航天局(NASA)等机构从20世纪90年代起一直推进人工智能技术在精确打击武器、智能无人飞行器、集群无人飞行器和有人/无人协同作战等国防相关领域的工程化应用。
在精确打击武器方面,美军正在研发的远程反舰导弹(LRASM)项目是人工智能技术在导弹武器精确制导中的成功应用案例。LRASM具有一定的感知和规划能力,尤其是能够在线进行威胁感知。如果在飞行过程中出现未知威胁,该导弹可以及时感知并在线改变航迹,从而绕过威胁区。此外,在末端攻击时,其不仅能识别目标,还能自主判断出目标的薄弱或关键部位,从而将打击效能最大化。

图3 LRASM远程反舰导弹Fig.3 Long-range anti-ship missile LRASM
在智能飞行器方面,X-47B无人攻击机作为美国海军空中无人战斗平台的验证机,连续创造了多个世界第一:它是人类历史上第一架无人干预,由电脑独立操控,具备监视、情报收集和战场打击多功能的军用智能无人飞行器;于2011年首飞成功,并于2013年实现了无人机第一次在航母上的自主起降,在人类操作员手指指令的引导下能够精准的完成弹射和着舰任务;于2014年完成了和一架F18大黄蜂有人驾驶战斗机的共同编队飞行测试;于2015年实现了空中自主加油,从对接加油开始,一直到最后脱开整个过程完全是由电脑操作完成。上述几种战术动作对于人类飞行员来说非常困难,但却均被无人机高质量完成。

图4 X-47B无人攻击机Fig.4 Unmanned combat aerial vehicle X-47B
在微型无人机方面,美军的山鹑无人机,长不到0.3m,质量不到0.5kg,机身由凯芙拉合成纤维和碳纤维通过3D打印制成,并通过锂离子聚合物电池供电。该无人飞行器可在40m/s的飞行速度下正常打开机翼,并在30m/s的风速中保持飞行姿态稳定,并具备数据通信能力,未来将可广泛应用于集群化作战。
图5 山鹑集群无人机Fig.5 Cluster UAV Perdix
2016年10月26日,美国军方在加利福尼亚州中国湖基地进行了无人机集群飞行试验,用3架F/A-18超级大黄蜂战斗机释放了103架山鹑微型无人机,山鹑无人机并不是按照预设程序行动的个体,而是共享决策、协调行动,以很高的精度快速通过一系列航路点,顺利到达设定位置。

图6 小精灵集群无人机Fig.6 Cluster UAV Gremins
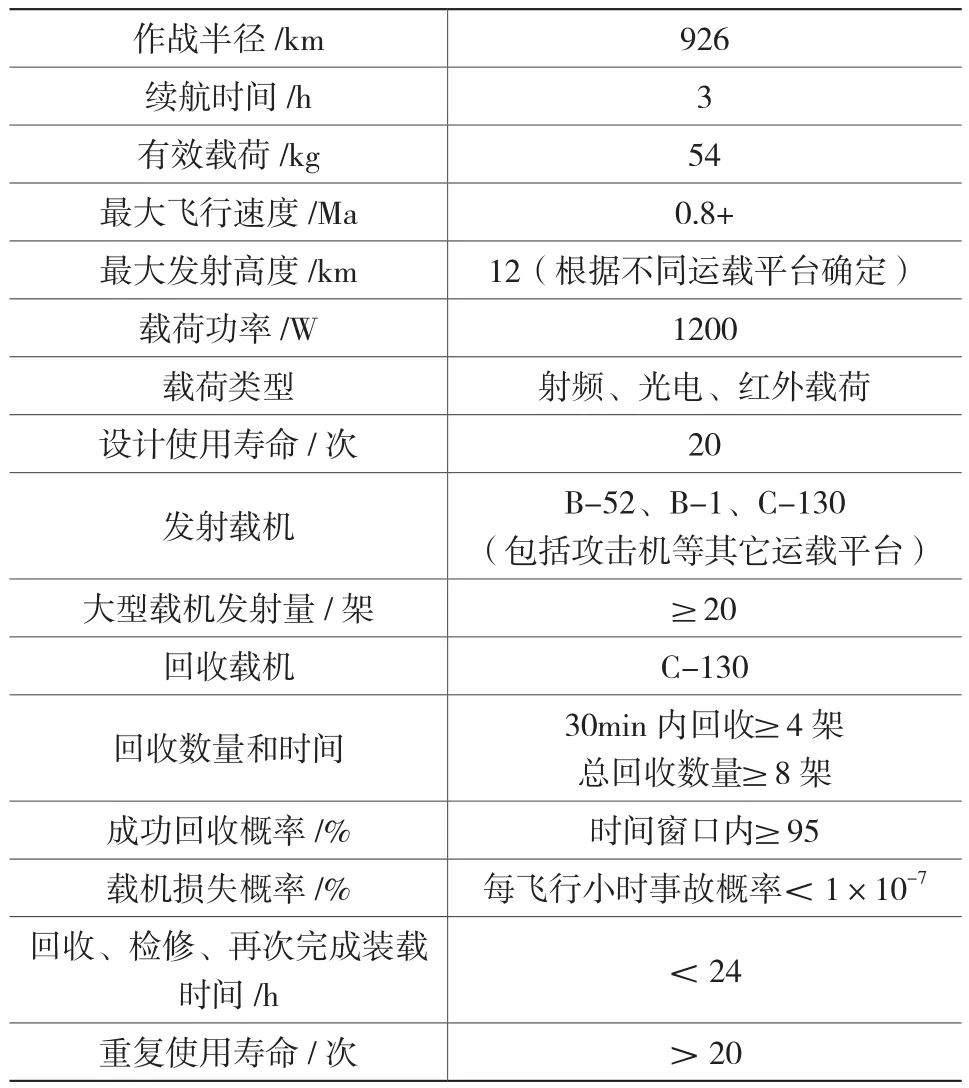
表1 DARPA小精灵无人机技术指标Table 1 DARPA technical index of Cluster UAV Gremins
2015年9月,DARPA发布了小精灵项目公告,提出通过载机在防区外发射携带侦察或电子战载荷、具备组网与协同功能的无人机蜂群,执行离岸侦察与电子攻击。并且最重要的功能是飞机可在空中自主的对无人机群进行发射和回收。该项目分三个阶段:2016年3月进入第一阶段——系统设计阶段,该阶段经费为1580万美元;第二阶段是为期约一年的技术成熟阶段,只有第一阶段的承包商才有资格进入后两个阶段;第三阶段是为期约一年半的演示验证及飞行试验阶段。最终,DARPA希望在2020年左右实施飞行演示验证,验证空中发射和回收无人机群的可行性及作战潜力。目前,DARPA设定的装备规模是1000架小精灵无人机和25套载机设备。
2.3 智能无人飞行器有人/无人协同作战研究计划
美军近期在有人/无人协同作战方面的典型研究计划包括:进攻性蜂群战术、拒止环境中的无人协同作战、体系集成技术试验。
进攻性蜂群战术主要针对复杂的、动态的以及不可预测的城市作战环境,无人作战平台在城市作战中能够发挥很好的作用,而无人机蜂群的作战效能将倍增。利用小型无人飞行器构建的250个以上异构自主蜂群系统,能够在6小时之内完成在8个街区的执行任务。但是目前,美军缺乏控制蜂群并与之互动的技术,且缺乏快速开发和共享适合于在多变的城市条件下应用蜂群战术的手段。
拒止环境中的无人协同作战主要应对敌方的强拒止环境,例如,敌方通过电磁干扰对我方系统的导航定位进行拒止,或敌方对来袭的武器有较强的拦截能力。为满足未来作战需求,有人/无人协同作战的研究核心集中在有人/无人编组以及协同算法。该项目的主要目标是开发新的算法和软件,验证新型无人机在拒止环境中执行作战任务的自主性和协同行为。
体系集成技术试验的项目背景是美军空中的优势正在受到挑战,项目目标是要维持在强对抗性环境下的空中优势,通过有人机/无人机协同配合,试图使有人机在安全距离和安全距离之外操控无人机来完成空中的协同探测以及打击任务。
3 智能无人飞行器作战的发展趋势
通过分析智能无人飞行器的典型作战项目,未来智能飞行器在作战上的应用主要有三个方面:分布式智能协同作战、高度人机融合作战和集群化作战。
3.1 分布式智能协同作战
传统的综合性作战平台注重各项作战功能的集中性,例如,美国在飞机上要求探测制导、武器装备、火力打击等各种能力不断集成,导致平台非常复杂。其中的典型平台是美国第四代战斗机,它集中了指挥控制、电子战、武器系统和探测系统等,体现集中式综合作战平台的概念,这种庞大且复杂的系统将导致综合作战平台的成本越来越高,复杂性越来越大,对未来作战极为不利,一旦遭到攻击会受到非常大的损失。
而基于智能计算和分布式技术的分布式智能协同作战方式,把不同的功能分散到不同的平台上。以空战为例,下一代空战可能不再以高价值的平台为作战核心,而是把作战功能分布到不同类型无人机上。作战任务由指挥控制无人机、攻击型无人机、探测型无人机、电子战无人机等各种类型无人机紧密协作、共同完成任务。分布式智能协同作战的优势在于各类型平台功能单一,具有显著的成本优势,但同时各无人机之间密切协作,有能力完成原来靠集中作战平台难以完成的一些作战任务,从而提高作战能力。
3.2 高度人机融合作战
美国从2016年开始大力推进忠诚僚机项目和人机融合项目,实现无人F-16战机与有人F-16战机的混合编队。无人战机作为武器载机和探测载机提高了空战过程中分布式探测和预警能力,同时它还可作为高机动的武器载机,本身不需要具有探测能力而只搭载大量武器,形成小型武器库实现武器的协调搭配。预计在未来无人战场上,人机高度融合可以实现更加高级复杂的作战功能和作战方式,降低作战损失和人员伤亡,从而获得战争优势。
3.3 集群化作战
群体智能是人工智能自主性的高级阶段,智能无人飞行器将由智能个体作战向智能集群作战方向发展。无人机蜂群战术可以把数量优势转化为质量优势,整体功能远远超过个体的叠加。同时无人机蜂群抗摧毁能力强,部分损失不影响整体功能。例如,美国山鹑无人机蜂群包含一百多架无人机,如果使用传统方法拦截,成本极高,而且部分损失对它的整体作战行动不会造成破坏性影响,因而其生存能力大大提高。
4 智能无人飞行器关键技术
4.1 智能态势感知技术
未来智能无人飞行器的协同作战需具有全面的感知能力,具体包括智能环境感知、智能目标感知以及智能故障检测等,未来作战环境的复杂程度对战场态势感知的智能化程度提出了更高的要求。
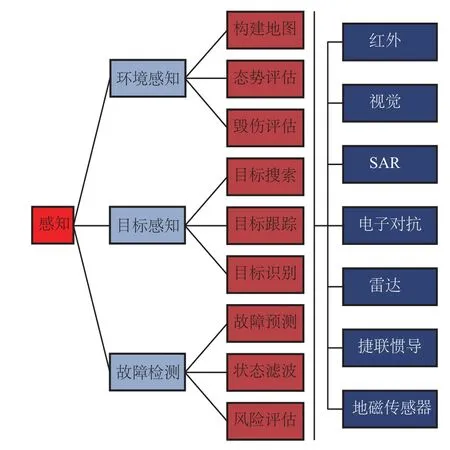
图7 无人飞行器智能感知分类Fig.7 Classification for intelligent situation awareness of Unmanned Aerial Vehicles
智能环境感知主要包括对自身状态、外部环境和威胁区域的感知,具体又包含战场环境、大气环境、风干扰、拦截威胁等战场信息的全方位感知,通过传感器滤波、多源信息融合等关键技术建立详细的战场环境信息。
智能目标感知主要是指在复杂战场态势下敌方目标的精准识别。目标感知问题相对复杂,采用图像感知的导弹对目标区域可视度、战场环境复杂度要求较高,另外,人工干扰也会显著降低导弹的目标感知能力。面临复杂的干扰环境和大量战场数据的融合处理,合理地将人工智能算法引入至目标识别领域,将有效提升智能目标感知的效率和性能。
智能故障检测技术常常应用于传统的大型战略导弹,主要应对发射后的发动机动力损失。在发动机故障情况下,及时有效的故障感知以及在线制导控制重规划,也可能促成飞行任务。目前,战略导弹在典型动力损失故障下的可靠性研究还处于研究论证阶段,当其中一台发动机动力损失20%~30%,甚至熄火的情况下,仍然要确保它能顺利完成任务。
4.2 智能决策技术
智能决策技术可以与观察-指引-决策-行动(OODA)循环结构相结合,从决策层和行动层两个角度出发,在自主编队、航迹规划、智能突防和目标分配等方面进行智能决策。
实际操作中,预设的自主编队情况和算法往往过于理想化,如何在线进行动态编队是目前需要解决的难题。在航迹规划领域,飞行器和火箭需要克服飞行过程中各种干扰和威胁,通过智能决策系统进行在线轨迹规划,从而实现调整打击目标范围以及实现低弹道突防等。在智能突防领域,由于智能无人飞行器面对的拦截环境极为复杂,需智能感知威胁并在线进行自主轨迹规划,或改变飞行策略等,通过智能突防技术的提升可以有效提高导弹生存能力。在目标分配领域,在导弹集群化打击多个目标的情况下,考虑多目标打击和部分飞行器受损的可能因素,如何进行动态目标分配也是需要重点关注的技术难点。
4.3 智能控制技术
智能控制技术主要应对无人飞行器在大范围跨域飞行、存在参数扰动或者突发的故障等情况下的智能、容错控制等问题,确保无人飞行器稳定完成飞行作战任务。
未来战场环境时空范围增大,无人飞行器需要进行大范围的跨域飞行作战,在这种情况下,飞行器气动特性大范围变化,控制系统的自适应性、持久可靠性、鲁棒稳定性问题等亟需通过智能控制技术予以解决。对于变形无人飞行器,其结构外形所控制的系统参数等可根据现场情况进行变化,结合智能控制技术实现无人机的全域稳定控制和制导参数优化等功能。
4.4 人机交互与通信技术
人机交互与通信技术主要解决无人飞行器集群及人机协同应用时的人与无人飞行器的信息交互和共享等问题,保障飞行器在强电磁对抗、拒止环境下等弱通信条件下仍能够有效组网和协同。
当无人飞行器集群进行自主协同作战时,网络通信技术、虚拟化技术、分布式计算技术及负载均衡技术的综合运用必不可少。人机交互与通信技术将分散部署的作战资源进行有机重组,从而形成的一种弹性、动态的作战交互与通信网络。具备虚拟化、连通性、分布式、易扩展和按需服务等特点的信息网络可为“人机跨域协同作战”等未来作战样式提供有力的信息支撑。
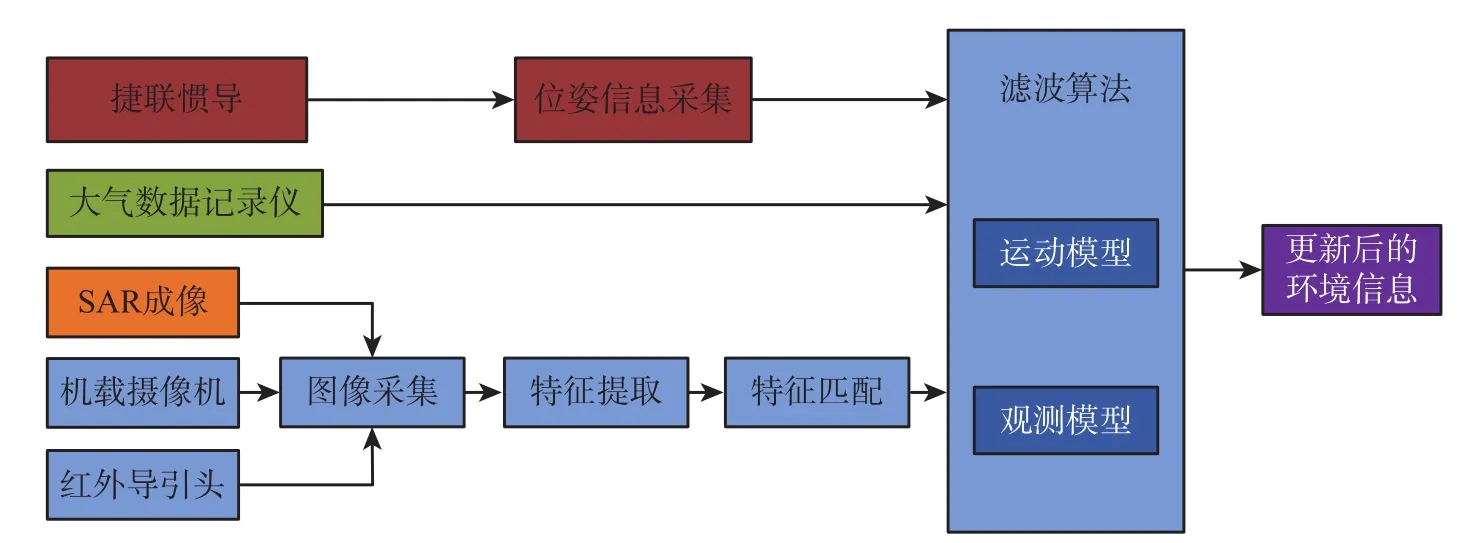
图8 无人飞行器智能感知过程Fig.8 Intelligent sensing process of Unmanned Aerial Vehicle
5 结束语
将人工智能与无人飞行器相结合将成为提升无人飞行器自主能力和作战效能的重要手段和必经之路,未来的智能无人飞行器将以人工智能技术为基础,能够模仿人类思维,具备态势感知、信息融合、自主决策、自主控制和组网协同能力,进而实现自主、高动态与分布协同作战。
未来军用智能无人飞行器的发展必定要经过分布式智能协同作战、高度人机融合协同作战和集群化作战的发展道路。随着智能态势感知、智能决策、智能控制和人机交互与通信等关键核心技术的不断成熟进步,智能飞行器的自主性能和作战效能将进一步得到质的飞跃。
