深海AUV有动力螺旋下潜技术及试验研究
2019-10-31冯朝,肖婷
冯 朝,肖 婷
(中国船舶重工集团有限公司第七一〇研究所,宜昌 443000)
1 引 言
海洋作为人类的蓝色国土,关系着人类的生存和发展。伴随着人类认识海洋、开发利用海洋资源和保护海洋的进程,水下机器人这一高新技术进一步发展并完善,无人自主水下航行器(Autonomous Underwater Vehicle,AUV)代表着未来水下机器人研究的方向,已向着更深、更远、功能更强大的方向发展[1-2]。近年来,随着AUV技术的不断进步,国际上深海AUV种类也逐渐增加,主要有挪威Kongsberg公司的REMUS6000[3]、美国Hydroid公司的Bluefin 21[4],英国南安普顿国家海洋中心研制的Autosub 6000[5]等,其在海上作业中发挥了重要作用。其中,REMUS6000和Bluefin 21是世界上比较成熟的商业AUV。中国从20世纪90年代开始深海AUV的研制工作,主要有沈阳自动化研究所的潜龙系列和探索系列深海AUV。
由于深海环境极为复杂,受潜水器自身的非线性、强耦合、有限载荷等影响,深海潜水器研发与应用极具挑战性。为了实现深海潜水器水下作业的可靠有效应用,需要突破深海潜水器的诸多关键技术,如水下环境感知与地图构建技术、水下路径规划与安全避障技术、水声通信与导航定位技术等[6]。
深海AUV作业的首要环节为下潜,能否到达指定的深度作业成为AUV突破关键技术的首要因素。基于能源方面考虑,国内外大部分AUV选择无动力下潜[7]。综合AUV的载体配置及水下密度的变化,下潜过程中的姿态、深度的高精度控制,以及受到干扰时的自适应过程及对状态的监测和应急的处理等[8],本文基于工程样机的基础,提出并实现深海AUV有动力螺旋下潜,并在湖上和海上开展试验,验证深海AUV有动力螺旋下潜技术的可行性。
2 总体设计
2.1 系统组成
AUV由舱体系统、动力系统、通信系统、导航系统、探测系统、控制系统和保障系统组成,如图1所示。

图1 AUV系统组成图Fig.1 AUV system composition diagram
其中,舱体系统为AUV的机械结构部分,为设备及组部件的布局和接口进行统筹规划,动力系统为AUV提供能源与动力,通信系统负责AUV与母船的通信,导航系统负责AUV的导航及定位,探测系统为AUV提供声光学设备进行水下作业,控制系统负责AUV的状态检测、航行控制和故障应急处理。
在总体设计过程中,通过设计AUV外形,考虑能源、控制及续航力等因素对推进器和舵机进行合理的布局,使AUV的转动惯量和质浮心距处在一个合适的范围。在满足总体技术指标的要求下,尽可能获得最优的总体性能参数,从而提高AUV的稳定性和机动性。综合各因素,采用主推+垂推+水平舵、垂直舵配置,主推提供前行动力,垂推实现快速上浮和辅助下潜,水平舵控制AUV的上浮与下潜,垂直舵控制AUV的航向。AUV总体外形如图2所示。其中,AUV主体部分直径880mm,长7.5m,质量2.5t。

图2 AUV总体外型图Fig.2 Outline drawing of AUV
2.2 电气设计
AUV深海探测需实时的进行大量数据通信,且在正常航行过程中,核心控制器需实时监测各设备的状态以及对设备进行相应的动作指令,因此,采用控制系统为AUV的控制中心,通过总线接口与各设备进行连接,负责完成AUV的状态监测、运动控制和应急处理等。本文采用网络化系统结构,将所有设备统一到以太网和CAN通信,数据交互量大的设备进行以太网通信,数据交互量较小的设备采用CAN通信,从而实现即时组网通信,灵活的实现设备间数据交互,且方便调试,简化连接,减少了水密线缆及连接器的使用,从而提高了系统可靠性。
3 控制策略及控制方法
通常AUV的基本控制方法为PID控制、滑模控制、自适应控制、神经网络控制和模糊控制等[9]。PID控制作为经典的控制策略,对AUV模型的控制精度较高,且在建模过程中,由于AUV高度的非线性和时变的水动力性能、附加质量和运动惯性较大等,模型的建立与实物之间存在一些差异[10]。结合工程应用及可靠性等多因素的考虑,本文采用传统的PID控制,采用计算机流体动力学(Computer Fluid Dynamics,CFD)方法进行流体动力建模,并对控制算法进行仿真,得到初始PID参数,进一步在湖上验证,微调参数,使AUV力学性能变化和所处的环境发生变化时,具有一定的自调节和自适应的鲁棒能力。PID控制图如图3所示。
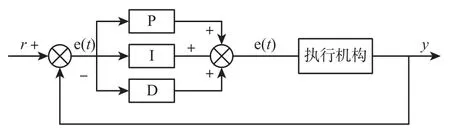
图3 PID控制图Fig.3 PID control diagram
下潜过程中,AUV由于自身的初始正浮力、海水密度、浮力材料吸水率等因素会导致AUV的浮力变化,同时考虑海流干扰、控制精度、突发情况应急处置以及纯惯性条件下导航误差偏差大等因素的影响,本文采用有动力螺旋下潜控制策略,一方面实现AUV深度区间的自适应控制,另一方面提升AUV的精确定位及应急处置能力。
通常将AUV的初始状态定为:初始正浮力约5~10kg,AUV静态姿态角:-2°<纵倾角<2°,-2°<横滚角<2°,下潜过程中AUV保持固定的纵倾角进行螺旋下潜,同时结合垂直舵角,使AUV在水下进行螺旋下潜。
4 湖上试验
4.1 湖上有动力螺旋试验
AUV完成设计和加工后,首先需验证下潜方案的可行性,其次对AUV的控制流程及功能进行验证,以确保AUV的安全。通常在海上试验之前,先进行湖上验证。
试验地点为清江水布垭试验场地,结合试验水深和水底地形的条件,选取一段500m×2000m的矩形试验区域,平均水深约120m。AUV在岸上进行上电,对初始状态进行确认,纵倾角1.2°,横倾角0.8°,完成相应的功能检查,将任务文件下达至AUV,主推转速设定为300rpm,垂直舵角25°,保持-9°纵倾角航行至70m处,到达指定深度后定深航行至80m处,在80m处开展水下自主航行任务。任务确认无误后,AUV布放入水,启动任务进行下潜试验,试验曲线如图4~6所示。
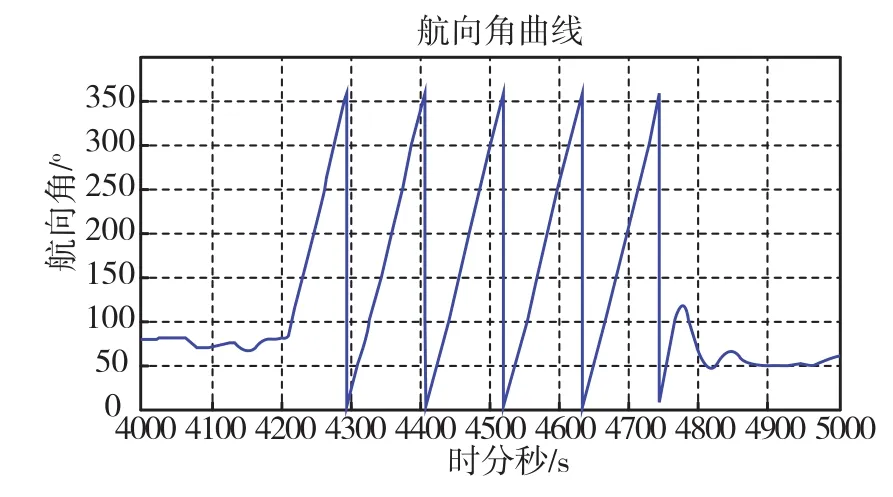
图4 航向角曲线Fig.4 Course angle curve

图5 深度和水平舵角曲线Fig.5 Depth and horizontal rudder curve
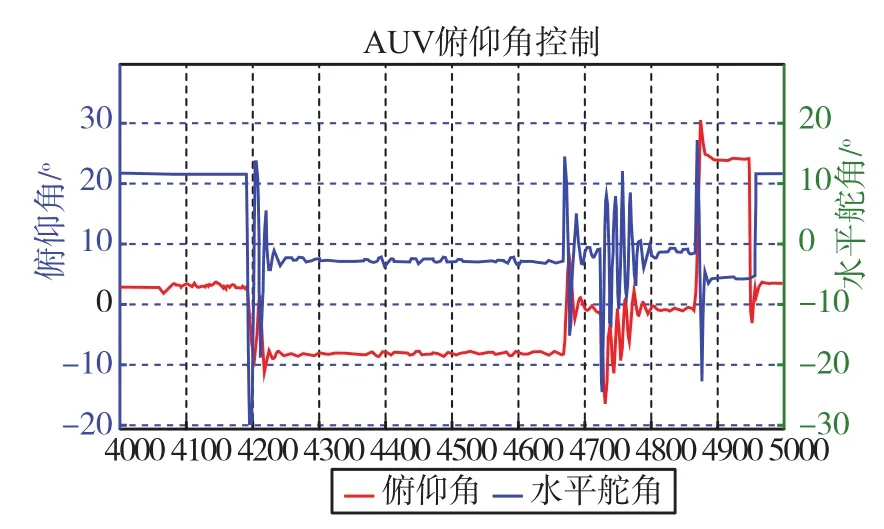
图6 纵倾角和水平舵角曲线Fig.6 Pitch and horizontal rudder curve
由航向角和纵倾角曲线可知,AUV在整个过程中保持-9°的纵倾角螺旋下潜5圈,转弯半径约为15m,时间约450s,垂向速度约0.18m/s。
为了满足海上试验大深度快速下潜的要求,对主推和纵倾角设定不同的值,对AUV进行多次试验验证,数据如表1所示。

表1 试验数据Table 1 Test data
分析试验数据,初步推断主推500rpm的转速,纵倾角30°下潜时,海上试验螺旋下潜3000m,大约需要3240s。
4.2 数据分析及应急处置
结合海洋环境的复杂性,AUV下潜过程中受海流和其他多因素的影响[11],并针对海上与湖上的差异进行分析和研究,对可能出现的异常情况以及不可预见的风险加以预测,以确保海上下潜试验的安全。本文从以下五点进行分析:
(1)AUV初始浮力与姿态。根据CTD测得试验海域水面的海水密度1.021g/cm3,需对AUV进行配重,重新调整正浮力,以确保AUV初始状态:正浮力5kg,-2°<纵倾角<2°,-2°<横滚角<2°。
(2)浮力材料吸水率。根据浮力材料参数:密度0.56g/cm3,耐压不小于70MPa,吸水率小于2%,同时结合AUV浮力材料质量800kg,可计算得到AUV浮力材料最大吸水量为1.6kg。由于浮力材料吸水率受压力影响较大,而AUV下潜深度约3500m,因此可推断浮力材料吸水量小于1.6kg。
(3)密度变化。下潜过程中海水密度未知,经网上查阅资料可知,深海3000m范围密度变化区间为1.02~1.04g/cm3,可推算AUV正浮力约增加25kg。
(4)海流的干扰。AUV在水下航行时,受到海流等因素的影响,会使AUV的位置和姿态发生变化。
(5)不可预见性风险。在海上下潜过程中,由于环境的复杂或者AUV自身故障导致的不可预见性风险。
针对浮力材料吸水率和密度变化所引起的浮力变化,将AUV正浮力调整为10kg、15kg、20kg、25kg和30kg,在湖上进行有动力下潜及水下航行试验,验证不同正浮力下AUV下潜和航行的自主可控。
对于海流所导致的姿态影响,由于AUV的控制具有一定的鲁棒性,根据干扰的情况从而自适应控制,使AUV的下潜姿态及位置能达到一个相对可控的值[12]。
对于不可预见性风险,由于试验过程无法对其进行判断,因此在原有应急策略基础上加上深度超限,AUV进水,长时间未结束下潜过程,长时间处于一个深度区域等应急,同时结合前视声纳的自主避碰,使AUV能够以安全精确可控的状态达到指定深度及位置。
5 海上试验
湖上试验验证完成之后,在三亚东南岸约452km处,位置坐标为(113.7692E,17.6344N),(114.5932E,17.6344N),(114.5932E,17.1587N),(113.7692E,17.1587N)所围成的矩形区域,水深为3400~3800m进行深海有动力螺旋下潜试验。
AUV在岸上进行上电,对初始状态进行确认,完成相应的功能检查后,将任务文件下达至AUV,布放入水后,启动任务进行有动力螺旋下潜试验。下潜曲线如图7~9所示。

图7 俯仰角曲线Fig.7 Pitch curve

图8 深度曲线Fig.8 Depth curve

图9 密度曲线Fig.9 Density curve
由深度和俯仰角曲线可知:AUV下潜深度约3300m,以纵倾角30°有动力螺旋下潜,纵倾角变化范围为-29°~31°,整个下潜过程中AUV的姿态可控。整个下潜过程约56min,垂向速度约0.98m/s,与湖上试验数据相吻合。通过密度曲线可以得出密度变化范围为1.021~1.043g/cm3。整个过程验证了深海有动力螺旋下潜技术的可行性。
6 结 论
本文从AUV总体设计入手,针对布局和系统配置,提出相应控制策略及方法,在湖上进行试验验证,试验结果说明不同主推转速和纵倾角下的垂向速度可控,通过湖上数据分析和对比湖海环境的差异性,制定下潜过程应急策略,实现了大深度下AUV有动力螺旋下潜,解决了下潜过程中AUV姿态不可控问题,对其他类型的AUV深海试验具有指导意义。
