人机共融机器人的月面驻留服务及应用展望
2019-10-31梁振杰刘兴杰党睿娜
梁振杰,江 磊,苏 波,刘兴杰,党睿娜
(中国北方车辆研究所,北京100072)
1 引言
人机共融机器人(Tri-Co Robots)是指人、机、环境共融的下一代协作型机器人,又称共融机器人[1]。国家自然基金委2016年设立“共融机器人基础理论与关键技术”重大研究计划,提出了共融机器人的新理念,要求共融机器人具备共存、协作、认知3个要点。未来的共融机器人将能与各种环境、操作者和机器人自然交互,协同完成复杂的工作[2]。
按照我国载人登月工程总体规划,将在合适的时机开展多项有人、无人深空探测任务,逐步突破核心技术,实现深空探测目标[3-4]。其中,月面机器人尤其是人机共融机器人将在月面科考探测、资源勘探利用、基地建设与维护、航天员能力增强等任务中发挥重要作用[5-6]。
本文综述了共融机器人在航天领域的技术研究进展,对月面驻留活动中人机共融机器人的任务目标、能力需求以及关键技术进行分析,在此基础上分析制定共融机器人系统在我国首次载人登月中的任务目标和能力需求,并提出针对首次载人登月中人机共融作业系统的工作模式。
2 共融机器人在航天领域研究进展
在航天领域,NASA在星表机器人领域已深入研究多年,通过建立新的人类和机器人联合深空探测模式,已经开发出一系列机器人来完成不同的任务目标。如图1所示,带有人机协同作业模式的星表机器人正在辅助补偿航天员完成精密采样动作[7];带有双灵巧臂的人形机器人“机器人航天员2号”在人类的操控下开展空间站作业服务[8];人机共融机器人K10在有人星球探测任务中实现远距离探测[9]。

图1 NASA近年来开发的若干人机共融机器人[7]Fig.1 Several Tri-Co robots developed by NASA[7]
俄罗斯航天局研制的人形机器人Fedor(图2),完全按照仿人躯干结构设计,目前正在进行功能测试,计划在未来的深空探测计划中,由Fedor代替人类完成危险任务[10]。

图2 俄罗斯航天局开发的人形机器人Fedor[10]Fig.2 Robot Fedor developed by Russian Space Agency[10]
2015年ESA研制出一款远程遥控空间机器人Justin(图3),该机器人具有51个主动自由度,主要通过国际空间站航天员远程遥控星表机器人进行设备安装、维修等任务[11-12]。机器人在航天员监督下进行作业,也可利用本身的计算和推理能力执行任务。ESA通过建立降表全系统的模拟试验环境探索未来空间机器人功能与性能设计。
在月面复杂环境与月面驻留复杂任务双重约束下,人机共融机器人要求具有优越的通过性能,可适应月海、类月海、撞击坑、高地、沙坑、砾岩等多种典型地形地貌条件[13]。
ESA研制的四足机器人ALOF[14]和Space-Bok[15]具备全地形的适应能力,在非结构化地面环境下展现出比轮履式机器人更为优越的通过性能,可以实现月面重力环境下4 m的跳跃高度并具备侧摔自恢复功能(图4)。足式机器人侧摔自恢复功能极大提高了机器人月面生存能力。通过搭载机械臂或专用末端执行器,足式机器人可配合航天员协同完成多种任务[16](图5)。
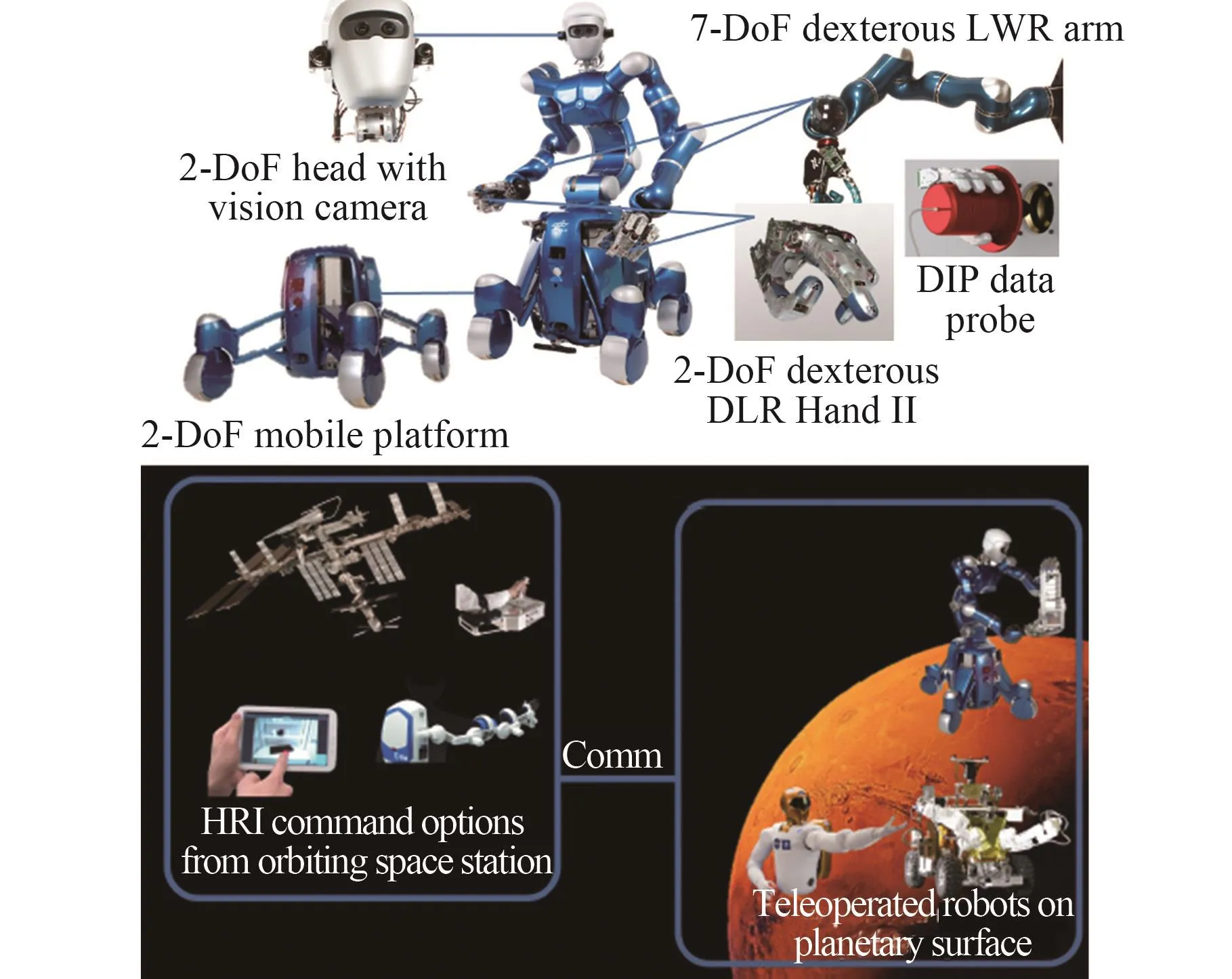
图3 ESA研制的空间机器人Justin[11-12]Fig.3 Space robot Justin developed by ESA[11-12]

图4 ETH Zürich研制的空间探测四足机器人[14-15]Fig.4 Space exploration quadruped robots developed by ETH Zürich[14-15]

图5 搭载双机械手的四足机器人[16]Fig.5 Quadruped robot with two manipulators[16]
美国JPL实验室研制的全地形六足机器人[17]如图6所示,采用轮腿式的移动机构与仿人操作机构融合配置。轮腿式机器人是轮式机器人和腿足式机器人的一种折中方案,既保留了轮式机器人高机动型的能力,又兼顾腿足式机器人高通过性的能力[18],对月面的复杂地形具有极强的适应能力。
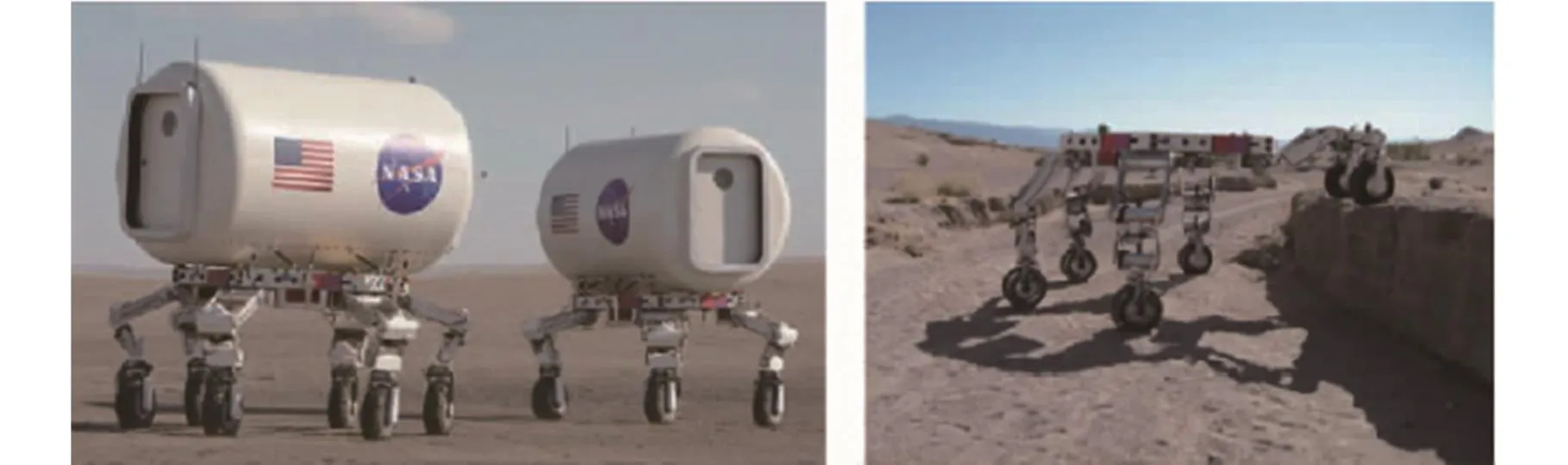
图6 JPL研制的轮腿式机器人构型[17]Fig.6 Wheel-legged robot developed by JPL[17]
除了传统的轮式机器人、腿足式机器人以及轮腿式机器人构型,根据不同的应用场景和场合设计专用机器人,如仿猩猩机器人[19-21]、仿螳螂机器人[22]、蠕动式机器人[23-24]等,可更好地在月面极端地形(山峦、砾石、山洞、沟壑、陨石坑、沙坑、沉陷坑、陡坡等)上完成勘察、精细操作、科学实验、钻探取样、紧急救援等任务(图7)。

图7 月面机器人创新构型Fig.7 Innovative configuration of lunar robots
综上所述,人机共融机器人正在成为下一代智能机器人技术的研究热点。人与机器人不同的能力特质可以互为补充,拓宽单独作业的能力边界,互相补偿人工智能和人类智能的局限性,协同完成星表探测的重大工程任务挑战。
3 月面驻留活动共融机器人任务与需求
3.1 共融机器人任务剖析
在载人航天和月球探测工程中,共融机器人为各种探测任务的实现提供了一条有效的解决路径,在典型的共融机器人配置中,可根据人机各自的能力特性,形成较为完备的配置方案。按照月面作业形式和需求将月面作业任务分为以下几种:
1)月面地形地貌探测。月面地形地貌探测任务贯穿整个探月工程始终,涉及到着陆点的选择、月球基地建造选址、月面探测路径规划、月面地质条件科考等一系列的探测任务,对后续任务的成败起到决定性作用。根据航天员、月球车、月面机器人的能力约束,月面地形地貌探测可达范围如图8所示。根据不同月面机动范围,需配置不同类型的机器人、月球车等设备,弥补航天员自身能力的不足,拓宽航天员机动范围。
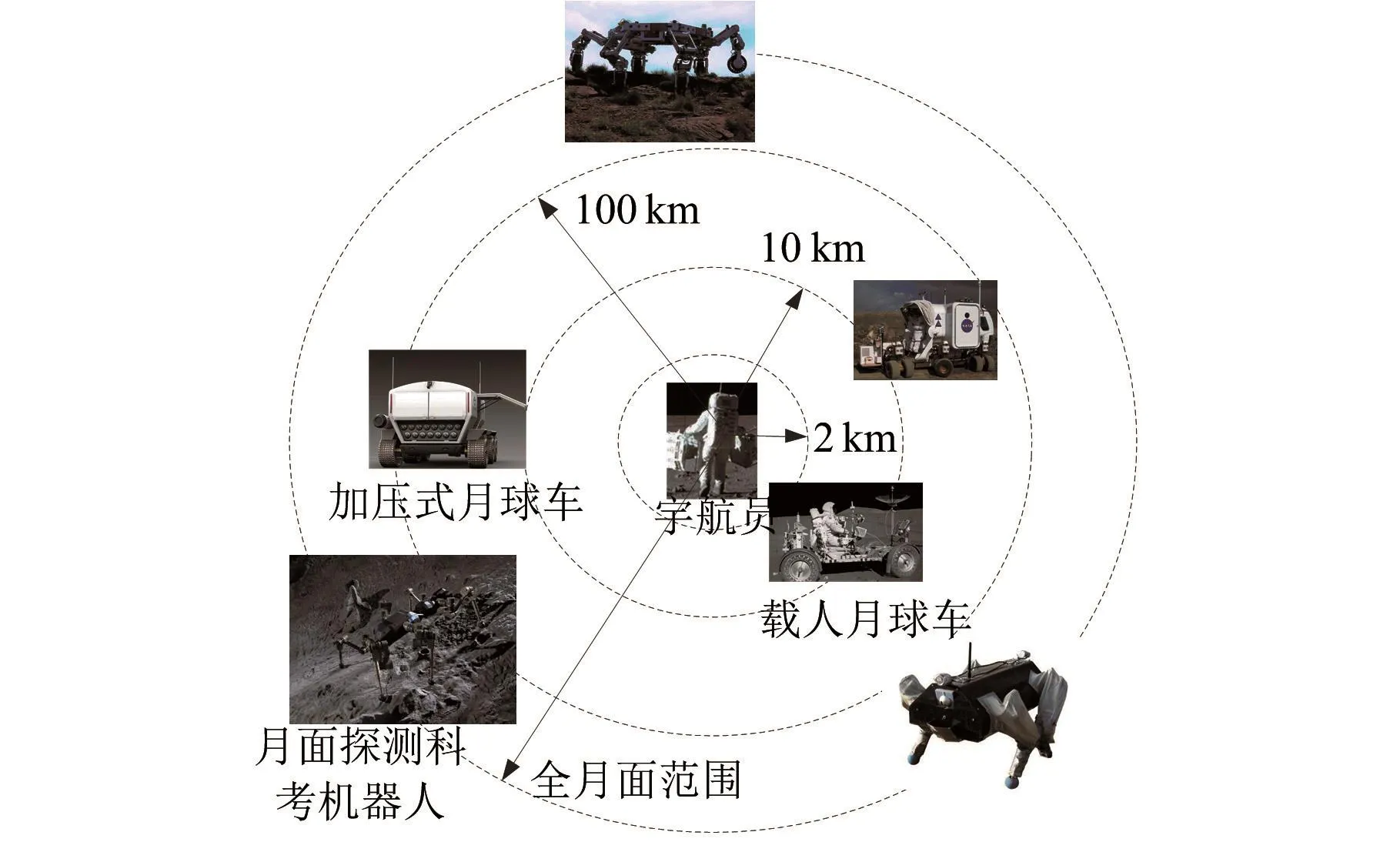
图8 月面探测机动可达范围Fig.8 Maneuverable range of lunar exploration
2)月球资源探测和利用。月球资源的探测和利用一直都是各国探月工程的重点,我国未来的月球探测任务重点在月球矿产资源的全球分布、利用前景评估上。根据现有的资料表明,月表富含氦-3、钛铁矿、稀土、水冰资源等,这些对于人类月球的长期生存、持续发展具有重要意义。需要通过资源探测了解资源的种类、含量、分布情况等,以便于后续深空探测的长远发展。仅仅依靠航天员实现月球资源的探测是不现实的,在航天员不可达的区域,如崖谷、溶洞、陨石坑等,需要专用机器人进行科考探测,机器人可在自主或受控状态下完成探测任务。
3)月球资源的获取与采样任务。采样作业任务主要由航天员、机器人、特种专用采样工具等完成[25],针对远距离采样任务、航天员不可达区域采样任务、高保真采样任务、高风险采样任务等作业,共融机器人可发挥重要作用(图9)。
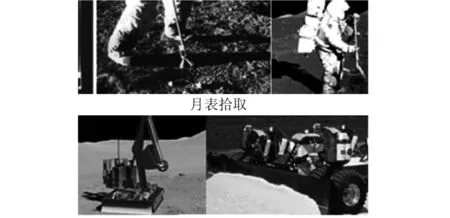
图9 月球资源的获取与采样[25]Fig.9 Acquisition and sampling of lunar resources[25]
4)月面科学实验。月面实验是探月工程总体任务的重要组成,利用月球表面独特的环境,开展高真空、低重力、无磁场、低干扰条件下各领域、各学科的科学实验可带动和促进一系列基础科学的创新发展,针对高精度、大量数据计算、重复实验等符合机器人特性的科学实验任务时,利用机器人取代航天员进行操作或者采用机主人辅的实验方式可大大减轻对航天员的技能要求,提高实验结果可靠性。
5)月面基地建造任务。根据月球探测的总体构想,将在月面建成可实现航天员居住的月球基地。该项任务涉及到一系列大型的作业活动,建成后的月球基地拥有月面工作平台、月面生活舱,月面能源供给站、月面/环月立体通信网络、月面活动系统等,是一个较为完备的能够自主运行的月球科学试验、生产制造活动系统[26](图10)。具体的建造过程包含建造设备的搬运、组装、原位资源的采集和利用等,由于航天员在出舱身穿航天服状态下,运动能力和效率大幅下降,所以整个月面基地的建造活动需要特种机器人的辅助,通过人机接口等协作技术对航天员进行感知增强辅助和运动增强辅助,完成月面设施建造任务。
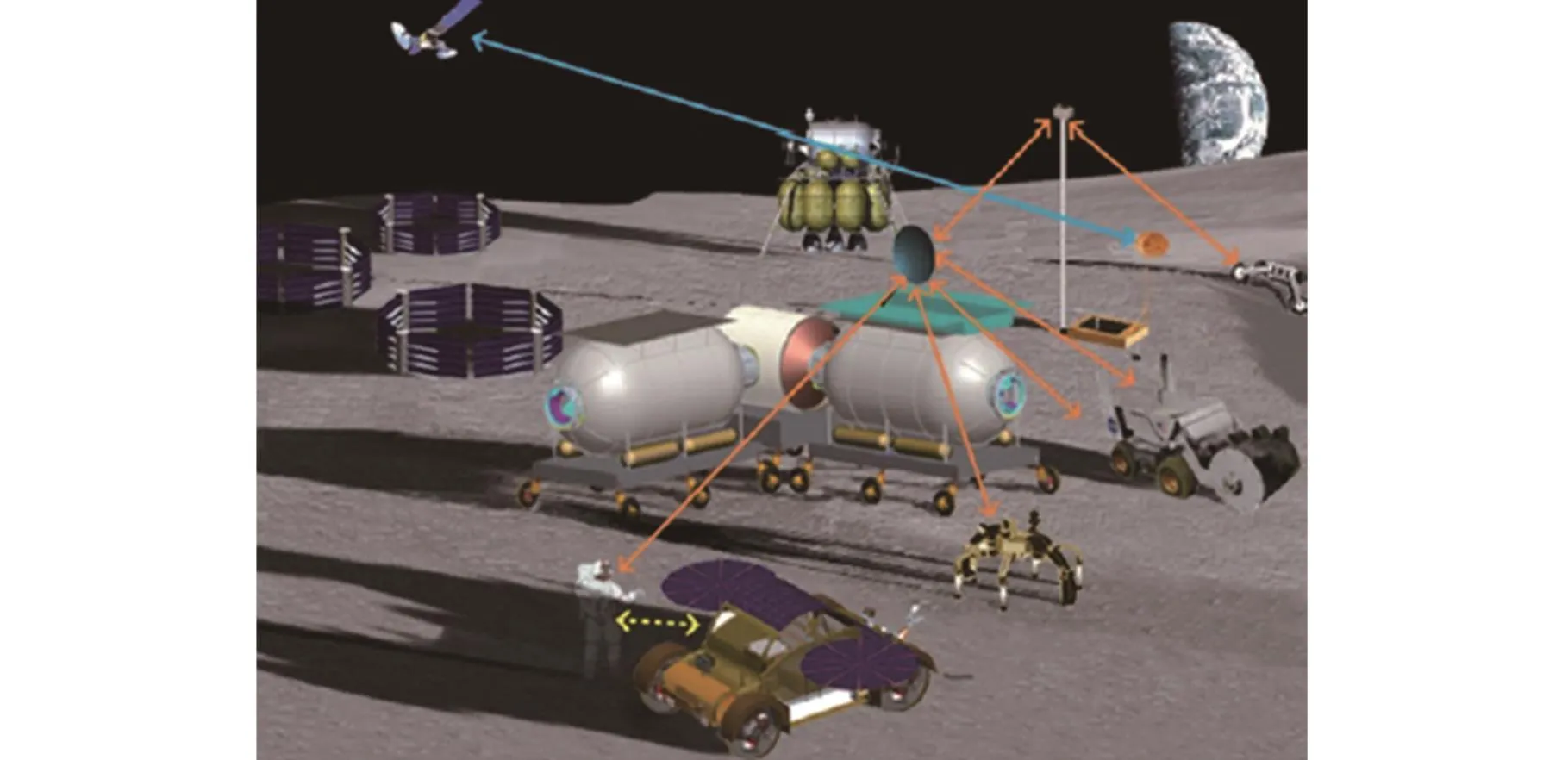
图10 月球基地设想[26]Fig.10 Conception of lunar base[26]
6)月面设施设备安装、维修任务。在前期可靠探测中需要对多种设备进行安装投放,可能会涉及大范围的机动或者高风险作业任务,这些任务均可由机器人来执行[27-28]。此外在月面高低温、强辐射、月尘环境下探月设备存在损坏的风险,需要进行维护维修以及保养(图11),针对无人值守状态下或高风险的维修任务,将主要以机器人为主要执行载体进行维修,此时航天员可进行遥操作或辅助操作。
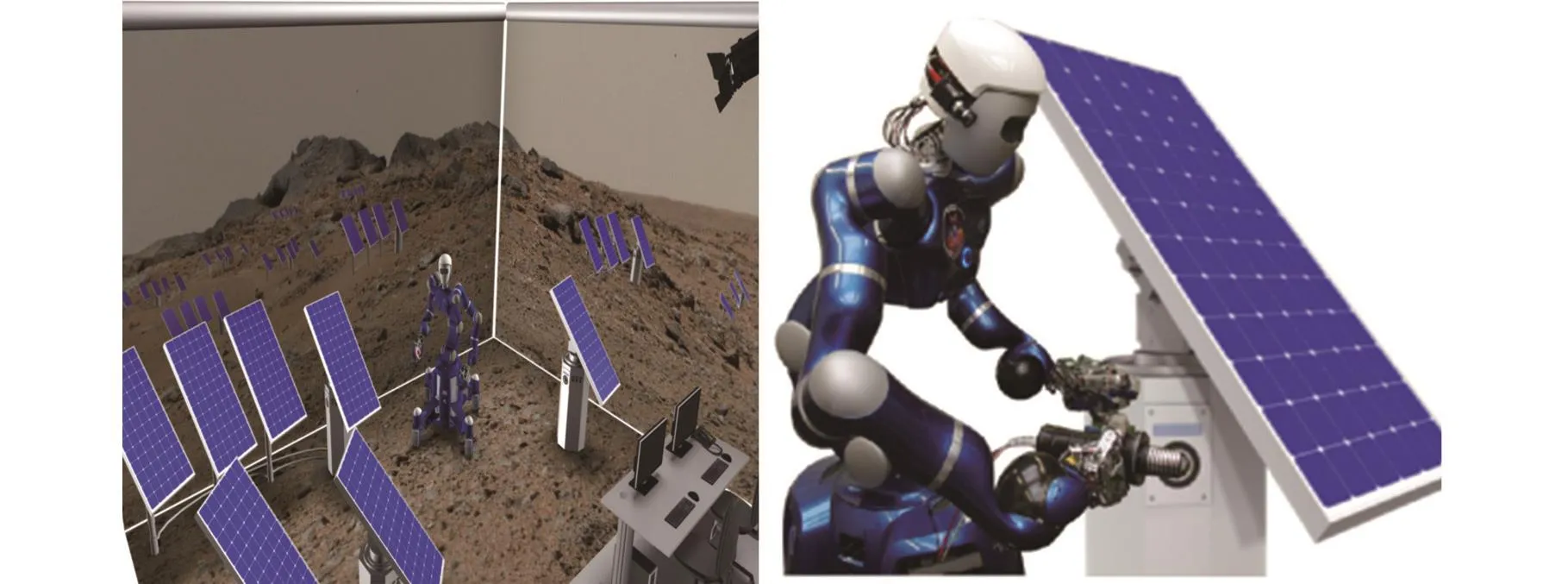
图11 ESA Justin对基地设备进行维护Fig.11 Maintenance of base equipment by ESA robot Justin
7)危险情况下救援任务。航天员在进行出舱作业任务或者进行远距离作业任务时出现紧急情况,比如航天员失去行动能力时,按照不同的情况可选择不同的救援设备进行紧急救援,载人月球车可作为备选方案之一,当载人月球车无法达到指定区域时,则需要选择特种机器人进行救援,比如腿足式机器人[29]等(图12)。
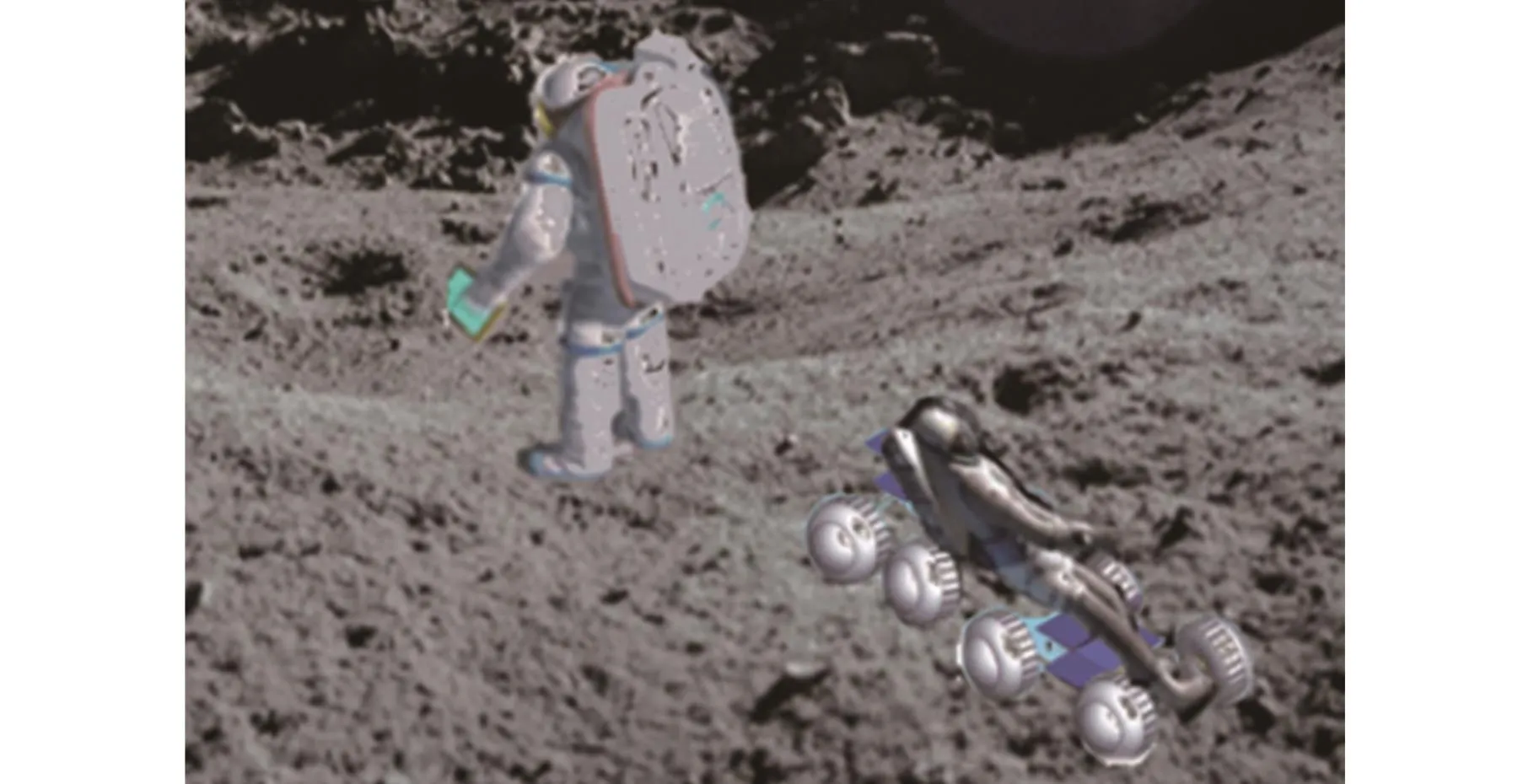
图12 机器人紧急情况救援[29]Fig.12 Robot emergency rescue[29]
3.2 共融机器人能力需求
月面机器人作业系统主要由航天员与机器人组成,人机的不同特性可从3个维度进行剖析(表1)。与机器人相比,人在智能决策、综合感知、意外情况处理方面具有明显优势,而机器人在快速复杂运算、恶劣环境探测、单调重复任务等方面有优势,因此二者在任务执行过程中可以优势互补,在月面驻留活动中实现多种作业任务[30],在共融机器人作业体系下(图13),对共融机器人的能力需求如图14所示。
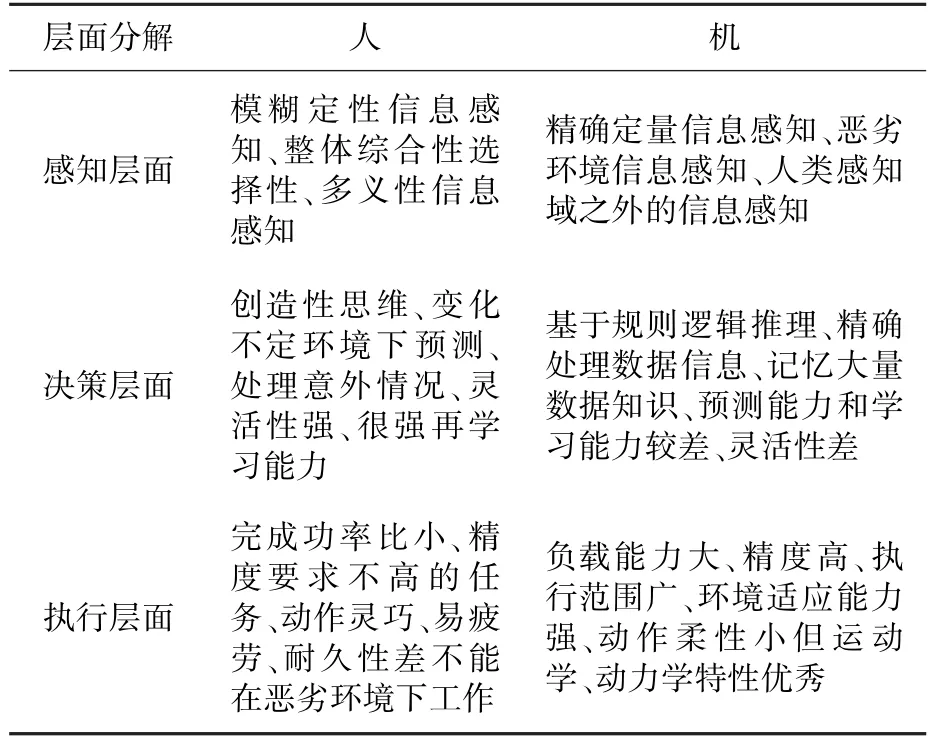
表1 人-机特性Table 1 Man-machine characteristics
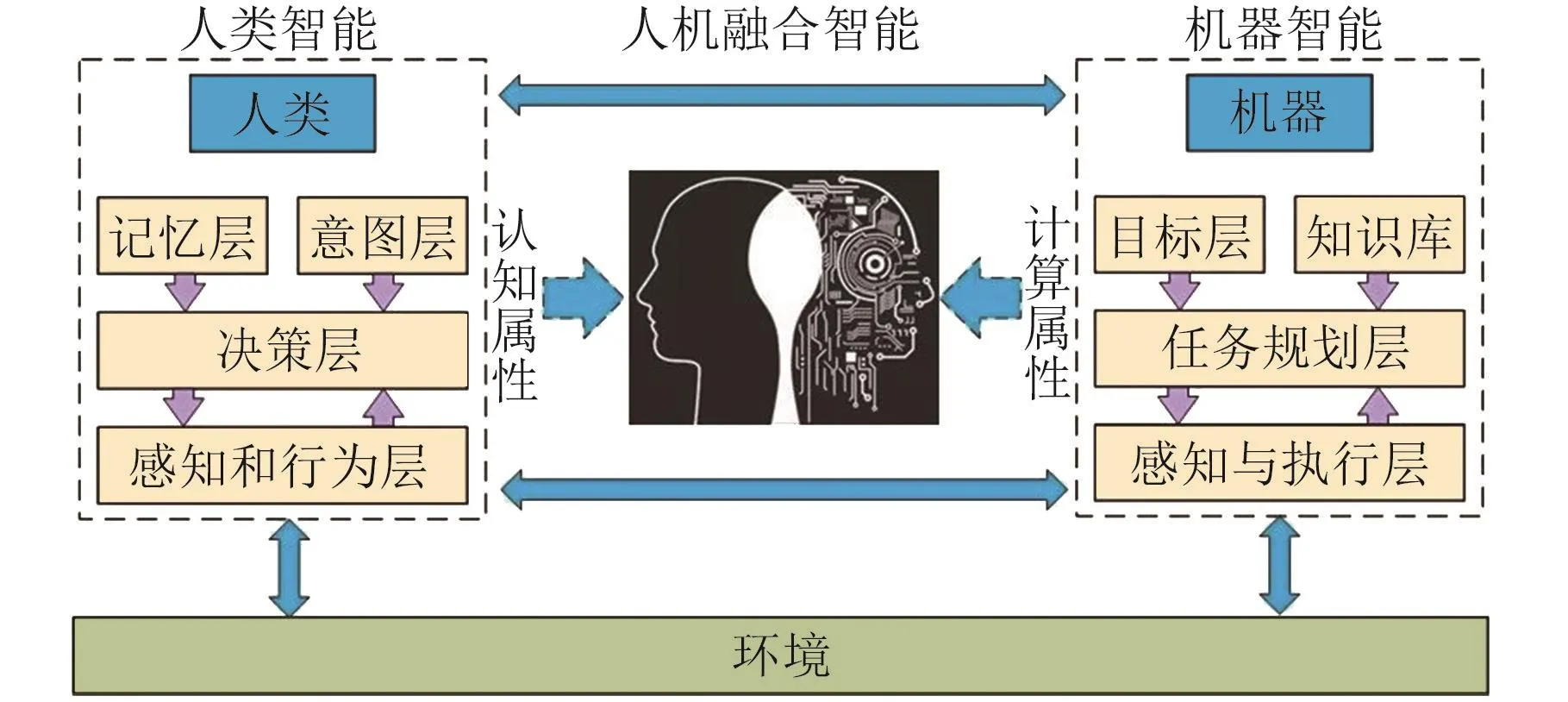
图13 共融机器人作业系统体系结构Fig.13 Hierarchical architecture of human-machine integration
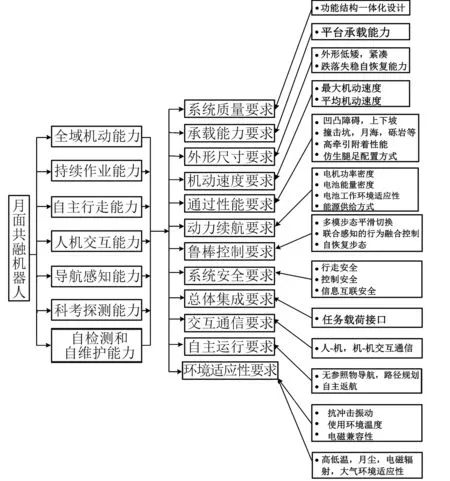
图14 月面共融机器人的能力需求Fig.14 Capability requirements of lunar Tri-Co robots
3.3 共融机器人关键技术
根据国内外共融机器人的技术发展水平和目前所掌握的技术储备,结合月面低重力、大温差、月尘等特殊典型环境,共融机器人还有以下关键技术需要解决:
1)适应月面复杂地形地貌条件的总体设计和系统集成技术。月面环境对共融机器人提出了苛刻的高适应性要求,对共融机器人的构型、配置方式进行深入探索和研究,建立适应月面环境的共融机器人系统的设计理论和设计方法;开发与新型移动系统相适应的控制系统;研制功能结构一体化原理样机,以上总体设计与系统集成关键技术是共融机器人实现月面机动的关键。
2)适应月表环境的各分系统元器件设计与选型。月面的真空、低重力、高低温、辐射、大气环境以及月球地形地貌、月壤的物理学性质、月尘环境、月表温度等因素对机器人的结构、材料、电子元器件、机动能力、工作寿命等都会带来严重影响,不同于地球环境下共融机器人的设计研发方式,面向月表环境的机器人必须将月表环境做为重大制约因素予以关注,指导各分系统设计和元器件选型。
3)复杂月面地形下多模步态稳定性与软硬件系统。月面移动机器人应具备自主作业和远距离作业的能力,要求共融机器人在应对复杂月面环境时应稳定可靠,可实现多模步态的自由平滑切换。在月面机动时,共融机器人可能面临各种工况条件,需要结合视觉系统、导航定位系统和决策系统在不影响机器人稳定性的情况下实时进行步态切换。基于多传感器的数据融合感知机器人根据空间环境和地面地貌地形数据信息,完全实现机器人复杂大扰动环境下“足-眼-脑”协同行走。适合月面工作环境的相应软硬件系统需要进行攻关解决。
4)人机智能交互与感知导航移动作业软硬件系统。一般情况下,共融机器人需要与航天员进行适时通讯,以接受指令并完成月面作业任务,为保证机器人可靠性与交互灵活性,机器人应支持多种交互和控制方式。机器人的自主行走和返航要求机器人具备改制导航系统,如何搭建月面环境下机器人智能交互与感知导航软硬件系统决定了机器人能否实现与航天员协同以及远程作业功能。
5)共融机器人动力驱动集成与性能优化技术。共融机器人的续航问题是保证机器人具备长时间工作能力的关键,为解决机器人轻量化需求和高续航能力之间的矛盾,需要进行机器人动力系统匹配与性能优化,提高系统效率,降低系统功耗。
6)共融机器人可靠性与自主安全技术。由于共融机器人系统复杂,容易受到各种干扰的影响,容错率较低,容易发生故障。机器人作为拓展航天员月面活动范围、提高工作效率的辅助设备,不应成为航天员的累赘。提高机器人的可靠性,降低对航天员维修能力和操控能力的依赖极其重要。此外机器人在月面全域机动时有可能遇到突发情况,导致机器人遭受撞击、跌落、侧摔等,在这些情况下要求机器人能够承受一定范围内的冲击载荷,特别是在跌倒时具备自主恢复功能可大大拓宽机器人应用范围,提高机器人作业能力。机器人应具备状态自检功能,同时具备一定的自修复能力,在严重损伤状态下可以降级使用,提高机器人的可靠性和自主安全。
4 首次载人登月任务的共融机器人应用展望
4.1 能力需求和作业任务
对于具备长期作业能力的月球基地任务系统,应具备表2所示的几种能力。按照紧急和重要2个维度对各个能力进行评价,从而推出针对我国首次载人登月任务中人机共融机器人系统所要具备的能力需求。表3中列出的是首次载人登月作业任务目标,具体执行任务目标不宜过于复杂,应该以考核任务安全和验证技术可行性为主要目的。

表2 人机共融机器人系统能力需求Table 2 Capability requirements for Tri-Co robot system
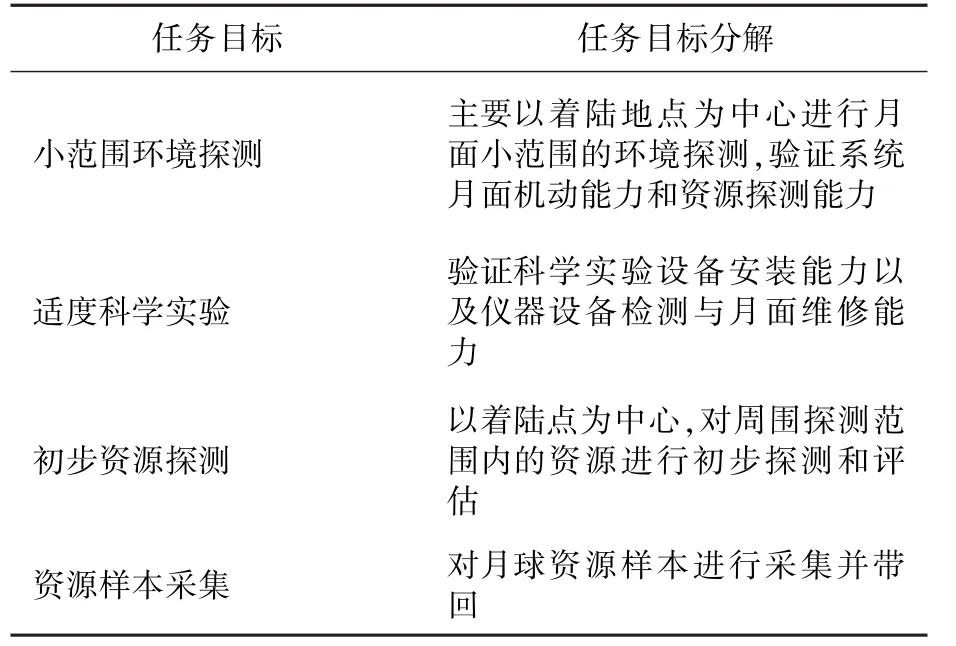
表3 首次载人登月作业任务目标Table 3 Objectives of the first manned lunar landing mission
4.2 人机共融机器人工作模式
我国首次载人登月人机共融机器人作业系统工作模式可具体分为航天员出舱作业和航天员舱内作业2种,2种模式下均需要机器人作业系统完成必要的作业任务。
在航天员出舱作业模式下(图15),主要以人主机辅为主,机器人作为航天员的能力边界延伸,辅助任务执行,完成以下高风险作业:
1)月面人机协同行走、探测;
2)月面资源采样、存储;
3)科学仪器实验设备的安装与投放;
4)航天员驾驶月球车并搭载机器人实现小范围机动;
5)利用共融机器人进行复杂任务作业、极端地形探测、高风险作业等。
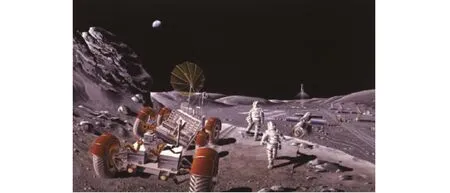
图15 航天员出舱作业工作模式Fig.15 Astronaut extravehicular operation modes
在出舱作业模式下,航天员-机器人作业系统的共融工作模式可具体细化为图16。
航天员舱内作业模式(图17)主要指航天员在载人舱或者基地的情况下通过人机接口或其它控制方式指挥舱内外机器人进行作业,该模式作业采用机主人辅工作模式,机器人依靠指令或自主完成任务作业,可以避免航天员舱外作业所面临的风险,延伸航天员作业能力[31]。
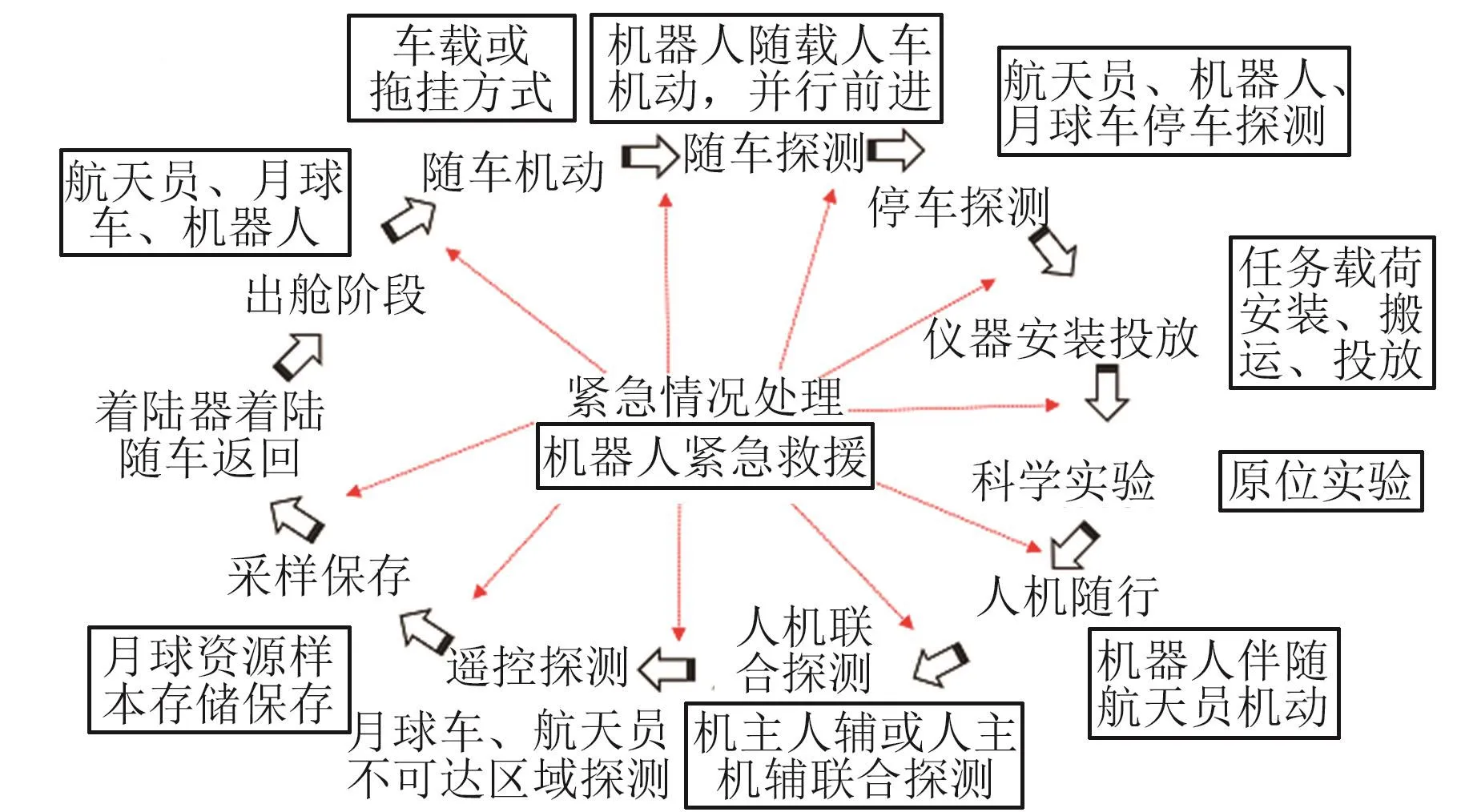
图16 月面作业任务人机共融工作模式Fig.16 Tri-Co robot operation modes in lunar tasks
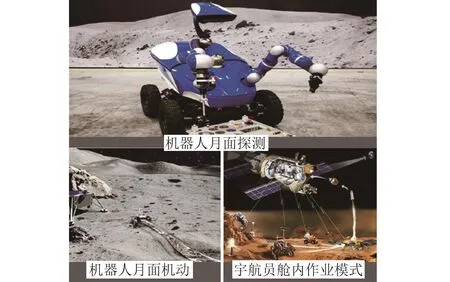
图17 航天员舱内作业工作模式Fig.17 Astronaut intravehicular operation modes
5 结论
1)在月球探测的任务中,具有复杂地形适应能力和任务执行能力的共融机器人具有巨大的应用潜力,共融机器人将成为未来深空探测的重要组成部分,可在航天员月面大范围机动、航天员出舱支持与能力增强、科学设备载荷安装、月球基地基础设施建设、科普示教等方面发挥重要作用。
2)实现从原理样机到工程应用的过渡,还需要解决一系列关键技术。从顶层规划入手,加大对共融机器人研发的支持力度;推动国内外共融机器人研究团队成立联合研发团队;对实现共融机器人月面应用相关的关键技术进行集中攻关突破;建立健全人机共融的月面机器人体系,从而有效推动共融机器人深空探测的长远发展。
3)针对我国首次载人登月应该主要以考核任务安全和验证技术可行性为主要目的,按照小范围探测、适度科学实验、初步资源探测以及资源样本采样返回的方案实施,为后续任务提供技术和数据支撑。
4)根据月面驻留活动中不同的作业任务与作业环境,可采用不同构型与配置的月面共融机器人系统,进一步提高机器人对极端月面环境和复杂操作任务的适应能力与任务执行效能。
