广义相干系数加权的超声虚拟源成像算法研究
2019-10-30贺庆汪亚中郑驰超彭虎
贺庆,汪亚中,郑驰超,彭虎
(合肥工业大学,合肥 230009)
1 引 言
传统的超声成像波束形成方法是通过对基阵中的阵元接收信号进行延迟求和或相位补偿,使期望方向的信号形成同相相加,在希望的方向上形成波束。但是基阵的分辨率受到瑞利准则的限制,当信号波长固定时,一般只有增加基阵的孔径长度才能提高基阵的分辨率。然而增加阵元个数会增加阵列的尺寸,难以适应实际工程[1]。为此,Passmann 等[2]提出了虚拟源成像方法。
虚拟阵元波束形成技术的提出使得阵列孔径在虚拟意义上得到了扩大,从而使得探测深度增加,图像对比度增加。随着虚拟阵元的提出和发展,2015年自适应虚拟源对不规则表面成像技术被提出[3],2017年血管内虚拟源成像被提出[4]。Fool等[5]提出了虚拟源成像原理与快速汉克尔变换相结合的成像算法。此外虚拟源成像也被用于无伤探测中[6]。
虚拟源超声成像算法可以提高分辨率和信噪比,但低分辨率扫描线不能被相关性叠加。Frazier等[7]将CF引入到虚拟源成像算法中,对数据进行相关性叠加。但CF-VS算法过度抑制了信号的相关性,削弱了成像背景的亮度[8],引入了伪影导致信噪严重下降。CF经过扩展,形成了广义相干系数(GCF)[9],该系数加权的波束形成算法可以有效改善声速不均匀带来的聚焦误差,且成像系统具有较好的鲁棒性和成像对比度。本研究提出GCF系数加权的虚拟源成像算法(GCF-VS),弥补了CF-VS成像算法的不足之处。
通过仿真和实验结果表明,GCF加权的VS成像算法在提高分辨率和对比度的同时,较好的保持了成像背景和对比信噪比。
2 原理
2.1 虚拟源成像原理
虚拟阵元超声成像技术将虚拟阵元概念和延时叠加波束合成方法相结合,利用两次延时叠加,减少了对大量低分辨率回波信号的数据存储。
虚拟源成像的两次聚焦波束合成(dual focusing beamforming,DFB)原理见图1。DFB分为两步:第一步利用滑动子孔径,运用定点发射聚焦和定点接收聚焦,将各个通道的回波数据经过波束合成器进行延时叠加波束合成,并将低分辨率扫描线(low-resolution scan lines ,LRL)数据进行储存;第二步是将聚焦点看做虚拟阵元,将LRL作为第二次波束合成的输入数据,采用逐点聚焦,进行二次延时叠加合成波束,获得最终成像结果。

图1 双聚焦波束合成原理Fig.1 The dual focusing beamforming


图2 虚拟源成像原理Fig.2 Virtual source imaging

(1)


(2)
第二次波束形成的输出数据是通过对LRL进行采样重构而成,包含了成像点的空间位置信息。假设在第i个LRL上的成像点是si(x,z),从式(2)可知si(x,z)=LRL(ti(x,z)),则虚拟源成像结果见式(3):
(3)
其中,h(x,z)是虚拟源成像后的高分辨率图像数据结果,I(z)是覆盖成像点p的虚拟源有效声场数目。I(z)可以根据图3的几何原理进行计算,见式(4)。

图3 两个连续子孔径发射声场的几何模型Fig.3 Two consecutive sub-aperture transmit sound field geometry model
(4)

2.2 CF加权的虚拟源成像
CF用空间频率上的直流分量作为评估参数,衡量各阵元的聚焦效果。用CF对输出结果进行修正可减小主瓣宽度,降低旁瓣,提高分辨率和对比度。则相干系数定义为:
(5)
CF加权的虚拟阵元成像见式(6):
(6)
其中,si(x,z)是第i个阵元所接收的回波数据,I(z)是有效阵元序列。
2.3 GCF加权的虚拟源成像
GCF被定义为预先设定低频回波数据频谱能量与总频谱能量的比值。回波数据的非相干部分对应信号的高频成分,相干部分对应信号的低频成分。
我们设虚拟源成像时的有效序列为S(x,z)。
S(x,z)=[s1(x,z),s2(x,z),.....si(x,z),...,sI(x,z)]
(7)
计算GCF之前,首先要对S(x,z) 进行离散傅里叶变换得到P(k),P(k)代表S(x,z)的频谱,则GCF见式(8)。
(8)
式中,N为P(k)的长度,一般不超过LRL的总数,设m为低频成分调节参数,通过m可以调节GCF的低频信号能量,通常m取2~4来保证成像的背景强度。GCF加权的虚拟阵元成像见式(9):
(9)
相对于传统成像中基于回波信号的GCF计算方式,虚拟源成像中是根据LRL计算GCF,因此m值对成像结果有不同的影响,本次研究中分析不同m值对GCF-VS成像算法的影响。
2.4 成像性能指标
为评估不同成像算法的质量,我们采用性能指标来衡量图像的质量,对于分辨率采用半峰值宽度(full-width at half-maximum,FWHM),也即-6dB波束宽度,来衡量点成像的分辨率。对于背景及吸声斑成像质量的评估一般采用对比度(contrast ratio, CR)[10-11],噪声对比度(contrast-to-noise ratio, CNR)[12]和背景信噪比(speckle signal-to-noise, sSNR)等参数来评估。计算公式分别如下:
CR=|μb-μcyst|
(10)
(11)
(12)
其中,μb是指背景组织的平均强度,μcyst是指斑内部的平均强度,σb为背景组织的成像强度标准差,σcyst为斑内部强度的标准差。
3 仿真
3.1 仿真系统设置
本研究所做的仿真是基于Field II超声系统仿真平台进行的[13-14]。设置仿真成像系统的主要参数如下:一个128阵元线阵探头,阵元间距为0.3 mm,阵元宽度为0.25 mm,高0.5 mm,中心频率为5 MHz,系统采样率为150 MHz,声速设为1 540 m/s。仿真体模大小为12 mm×1 mm×13 mm,该体模包括两个亮点,一个半径为3 mm的暗斑囊肿。点的位置为(-3 mm,25 mm)和(-3 mm,15 mm),暗斑囊肿的位置为(0 mm, 20 mm),仿真成像区域的范围设置为深度0~30 mm, 侧边距为-6~6 mm。
3.2 仿真结果
图4和图5 为fixT-fixR,VS,CF-VS和GCF-VS算法的仿真结果,我们选取(-3 mm,25 mm)处的点进行分析,见图4(b)中红色方框所示。图4(c)中CF加权的VS算法图像对比度明显提升,暗斑轮廓更加清晰,点的横向分辨率进一步提升,但是背景亮度变暗, 这是由于CF系数过度的抑制了信号的非相干性,引入了噪声。图5(a)-(d)中,GCF-VS算法中点的分辨率比VS有所提升,暗斑的轮廓更加清晰。背景亮度虽降低,但是随着m值的增大背景亮度逐渐增大,这是因为m值越大,对非相干信号的抑制降低。
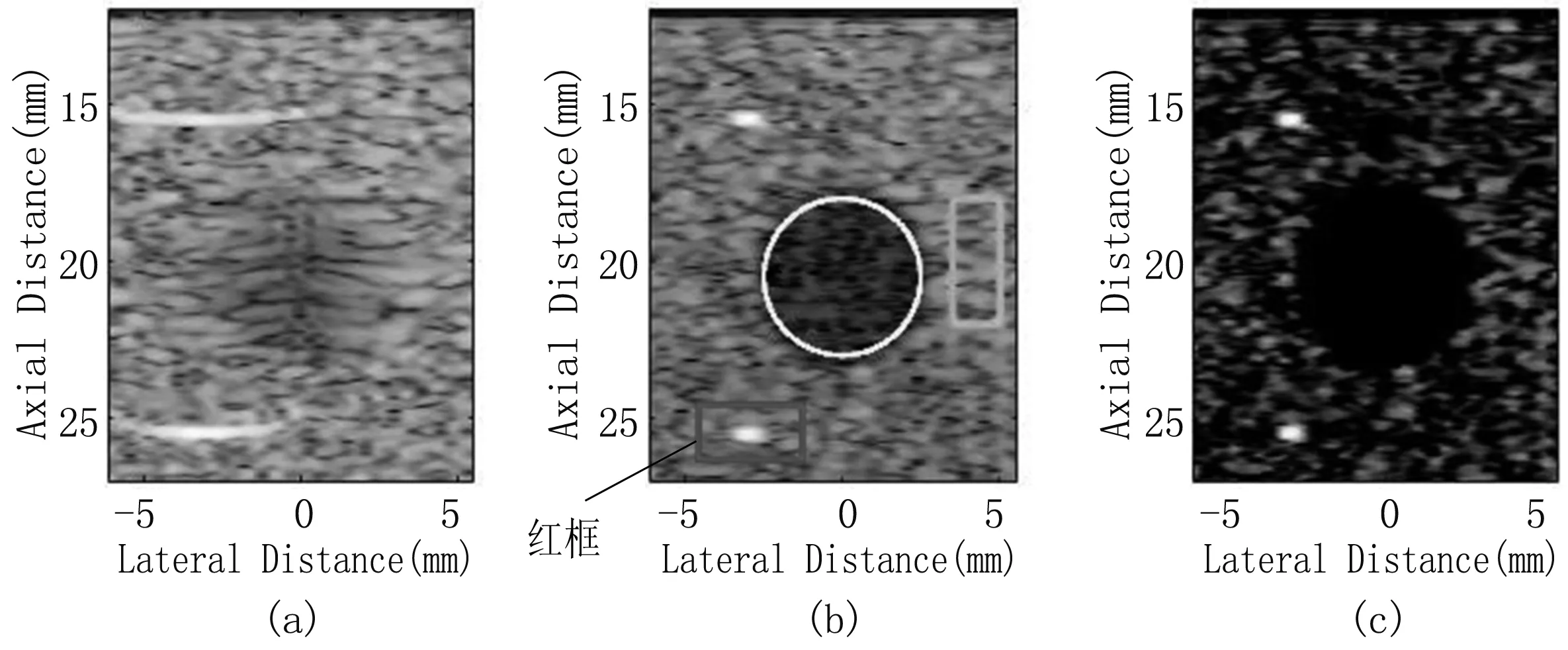
图4 各个算法仿真成像(a).fixT-fixR;(b).VS; (c).CF-VSFig.4 Simulated images formed by different methods(a).fixT-fixR;(b).VS; (c).CF-VS
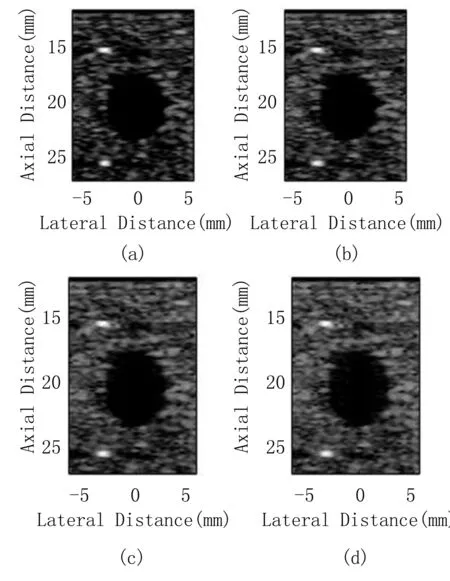
图5 各个算法仿真成像(a).GCF-VS(m=2);(b).GCF-VS(m=4); (c).GCF-VS(m=6);(d).GCF-VS(m=8)Fig.5 Simulated images formed by different methods(a).GCF-VS(m=2);(b).GCF-VS(m=4); (c).GCF-VS(m=6);(d).GCF-VS(m=8)

图6 各算法仿真点横向强度变化Fig.6 Lateral variations of the simulated point located at(-3 mm,25 mm)
由表1可知,CF-VS的横向FWHM最小为0.46,比VS降低32.4%。GCF-VS算法中,GCF-VS(m=2)的横向FWHM最小为0.56,比VS减小17.6%,比CF-VS增加21.7%。由于纵向分辨率取决于波长,因此纵向FWHM基本相同。图6为各算法仿真点横向强度变化,由图可知CF-VS 算法可以很好的降低主瓣宽度,提升图像分辨率。GCF-VS的主瓣宽度比VS小,且随着m值增加主瓣宽度增加,GCF-VS(m=2)的主瓣宽度最小,即m=2时GCF-VS有最好的分辨率。
由表2可知,GCF-VS(m=6)有最高的CR,比VS提升114.5%,比CF-VS提升17.5%。对于CNR,GCF-VS(m=6)值最高,比VS提升48.2%,比CF-VS提升53.6%。 对于sSNR,GCF-VS(m=8)比VS降低30.9%,但是CR和CNR比VS分别提升17.5%和47.7%。由此分析可知,GCF加权的VS成像算法能够提升图像对比度、信噪比和图像分辨率。相比于CF-VS算法,GCF-VS算法有更好的对比度,对比信噪比和信噪比,能够较好的保持信号的相关性同时避免了对非相关信号的过度抑制。由以上分析可知,GCF加权的VS算法可以很好的提升图像质量,且m=8时效果最优。

表1 各算法仿真点FWHMTable 1 FWHM of the simulated point at -3 mm, 25 mm
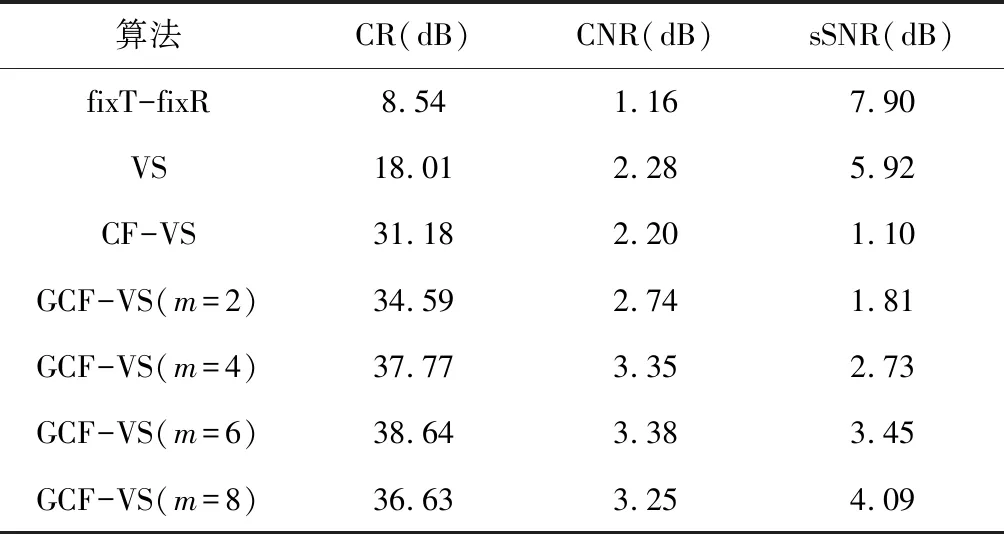
表2 各算法仿真斑CR,CNR,sSNRTable 2 CR ,CNR and sSNR of the simulated cysts for different methods
4 实验
4.1 实验设置
为了进一步验证GCF-VS的可行性,我们采用加拿大优胜公司的Sonix-Touch超声成像系统进行实验,选用中科院声学所KS107BG型标准超声成像体模。采用线阵探头L14-5,该探头有128个阵元,阵元间距为0.3 mm,发射信号的中心频率为5 MHz。聚焦深度为40 mm, 采样频率为40 MHz,所有算法的成像结果动态范围均设为60 dB。
4.2 实验点成像
见图7,我们选取红色方框位置的点进行分析,图7(c)中点的横向分辨率提升,图像背景变暗。图8为SIF-VS算法不同m值的成像结果,随着m值的增大,图像背景变亮,同时GCF-VS算法点的横向分辨率比VS优秀。图9为各算法点的横向强度变化曲线图,其中CF-VS的主瓣宽度最小。GCF-VS算法中,随着m值的增大,主瓣宽度增大。表3中CF-VS算法的横向FWHM最小,GCF-VS次之。CF-VS的FWHM比VS降低43.6%,GCF-VS(m=8)的横向FWHM比VS 降低2.6%,即GCF加权VS成像可以有效提升虚拟源点的横向分辨率。

图7 各算法对实验点成像(a).fixT-fixR;(b).VS;(c).CF-VSFig.7 Experimental point images formed by different methods(a).fixT-fixR;(b).VS;(c).CF-VS

图8 各个算法对实验点成像(a).GCF-VS(m=2);(b).GCF-VS(m=4);(c).GCF-VS(m=6);(d).GCF-VS(m=8)Fig.8 Experimental point images formed by different methods(a).GCF-VS(m=2);(b).GCF-VS(m=4);(c).GCF-VS(m=6);(d).GCF-VS(m=8)

图9 各算法对实验点的横向强度变化Fig.9 Lateral variations of the experimental point
4.3 实验斑成像
图10和11为各算法对实验暗斑的成像结果,与仿真结果相似。CF-VS和GCF-VS算法成像的暗斑对比度和边界清晰度提升,暗斑内部噪声被很好地抑制,但是在CF-VS成像中,由于对非相关性信号的过度抑制导致背景变暗并且有噪声引入。GCF-VS算法中可以通过调节m参数减少对非相关信号的过度抑制从而提高背景亮度。

表3 各算法实验点的FWHMTable 3 FWHM of the experimental point

图10各算法对实验暗斑成像(a).fixT-fixR;(b).VS;(c).CF-VS
Fig.10Experimental cyst images formed by different methods(a).fixT-fixR;(b)VS;(c).CF-VS
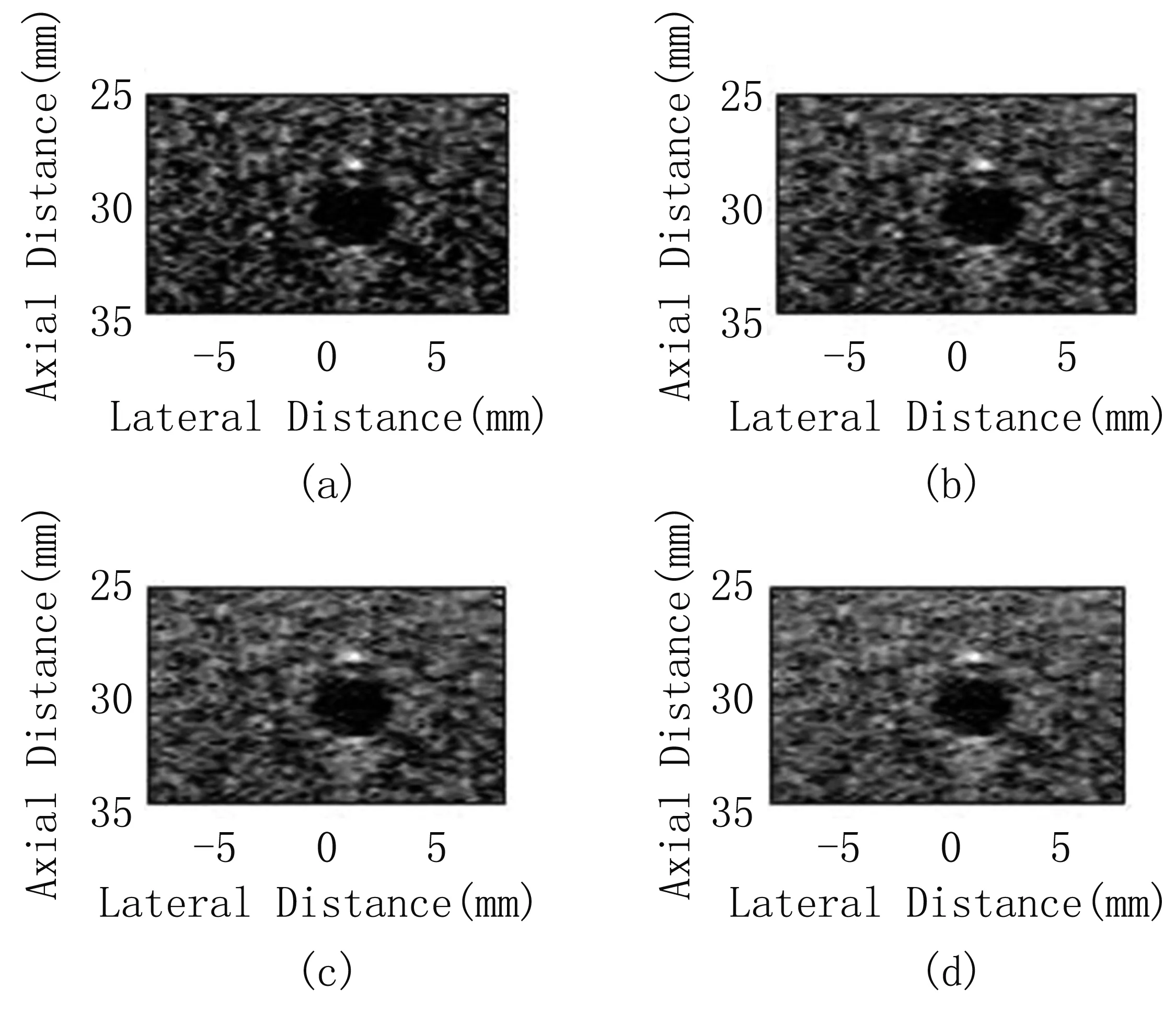
图11 各个算法实验暗斑成像(a).GCF-VS(m=2);(b).GCF-VS(m=4); (c).GCF-VS(m=6);(d).GCF-VS(m=8)Fig.11 Experimental cyst images formed by different methods(a).GCF-VS(m=2);(b).GCF-VS(m=4);(c).GCF-VS(m=6);(d).GCF-VS(m=8)
表4中,GCF-VS(m=6)的CR最高比VS和CF-VS分别提升109.7%和17.5%。 GCF-VS(m=8)的CR比GCF-VS(m=6)降低0.26%,比VS和CF-VS分别提升109.2%和17.2%。GCF-VS(m=8)的CNR最高比VS和CF-VS分别提升41%和8.3%。对于sSNR,相比于VS、CF-VS和GCF-VS均降低,但是GCF-VS(m=8)的sSNR比CF-VS提升191.8%。实验中由于环境中不确定因素的影响会导致实验结果与仿真结果之间存在些许误差,但总体相同,GCF-VS算法在较好保持背景亮度的情况下能够提高虚拟源成像的对比度和对比信噪比。

表4 各算法对实验斑成像的CR,CNR,sSNRTable 4 CR CNR and sSNR of the experimentcysts for different methods
5 结论
本研究所提出的GCF-VS成像算法,能够进一步提升虚拟源成像的对比度和噪声对比度。相对于CF-VS算法,对非相关信号的抑制减弱,使得信噪比相对提升同时进一步提升图像对比度和对比信噪比。通过仿真与实验数据进行验证,证明了GCF-VS算法的可行性,同时推荐m值取8。下一步工作将继续对加权系数进行研究和改进,针对VS成像,期望改善加权后信噪比降低的问题。
