GAMIT/GLOBK在高精度长基线像控点解算中的应用
2019-10-16杨德芳丁开华
杨德芳,丁开华,许 伟
(1.青海省遥感测绘院,青海 西宁 810001;2.中国地质大学(武汉) 地理与信息工程学院,湖北 武汉 430074)
0 引 言
GAMIT/GLOBK组合平差解算方式,通过利用全球分布的IGS台站观测文件、GPS卫星精密星历、精密钟差、对流层、电离层等各类改正模型可以获取测站高精度的三维坐标信息。其解算过程中采用IGS站作为已知控制站点,因此待解算测站点可以不考虑基线距离的限制、区域网站点间共模误差的影响,可以直接实现待解算测站精密单点解算,大大解决了常规GPS测量依赖公共站点、短基线解算的缺点。
目前对于GAMIT/GLOBK解算方式的研究,纪海源通过GAMIT/GLOBK软件对汾渭断陷带及邻近地区2011—2013年的36个连续站和227个区域站GPS观测数据进行处理[1],其2次解算的GPS连续站水平方向平均点位误差在2 mm左右,垂直分量平均点位误差在5 mm左右,一般点位误差的限差为5~10 mm.林超才利用GAMIT/GLOBK对四川地震监测网CORS站及国内部分IGS站2008年5月12日地震前后一段时间的观测数据按照地震前及地震后分别进行单日的基线解算[2],并对基线解算结果进行精度评定和原因分析。刘宗强等对进行陆态网解算时只需要加入北半球的IGS站就可使基线得到较好的U方向解算精度,陆态网选择8个左右的IGS站较为合适[3]。高旺等实验结果表明对于中长基线,使用IGR或IGU星历进行GAMIT基线解算与使用IGS最终星历解算的坐标分量较差优于10-9数量级[4]。杨登科等从L1_ONLY和L1L2_INDEPENDENT仅适用5 km以下基线向量解算,LC_HELP和LC_AUTCLN的解算效果相当,LC_AUTCLN相对较好[5]。罗全等通过GAMIT软件解算不同截止高度角条件下的基线结果,得出当截止高度角取10°~15°时,基线解算结果最佳[6]。
由于上述优势,摄区像控点布设及施测南北基线跨度160 km,东西基线跨度135 km,点与点间基线跨度大,采用GAMIT/GLOBK组合平差模式长基线解算时必须考虑GPS长基线解算时对流层、电离层及地球曲率等因素的影响,通常情况下可以考虑2种解算模式。
第1种:测区待测点与覆盖测区范围CORS基准站联测,采用商用软件进行平差解算;
第2种:采用测区周边均匀分布的全IGS站作为基准站,利用GAMIT/GLOBK进行长基线平差解算。
第1种模式必须依赖高精度CORS站作为控制点,如果CORS站无法覆盖整个测区或是测区内没有有效的CORS站,则需联测周边已知控制点重新布设控制网进行测量,这样就增加了外业工作量及工作效率,第2种模式不受测区CORS站及已知控制点的制约,灵活采用全球分布的IGS站作为控制点,人员到达测区可直接开始静态施测,无需考虑点间基线长短,点、边连接等测量方法,就可以实现cm级的精度,文中测区站点及IGS测站分布情况及测站日观测情况分别如图1,2所示。
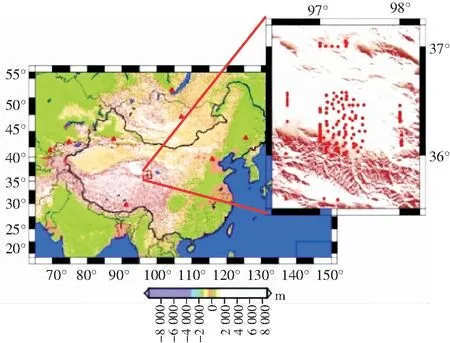
图1 测区站点及IGS测站分布情况Fig.1 Distribution of survey stations and IGS stations

图2 测站日观测情况Fig.2 Daily observation of stations
1 GAMIT/GLOBK解算策略
1.1 GAMIT/GLOBK解算意义
由于青海省独特的高原地理环境,目前建成的CORS站还不能覆盖该省全境,如图3所示,红色圆形区域代表每一个CORS站所覆盖的范围,若要在CORS无覆盖的测区范围内开展GPS测量工作,则存在重新布设基准控制点及联测问题[7],此过程涉及大量人力物力支出问题,如果采用GAMIT/GLOBK解算方式,就可以解决测区无起算控制点的限制。
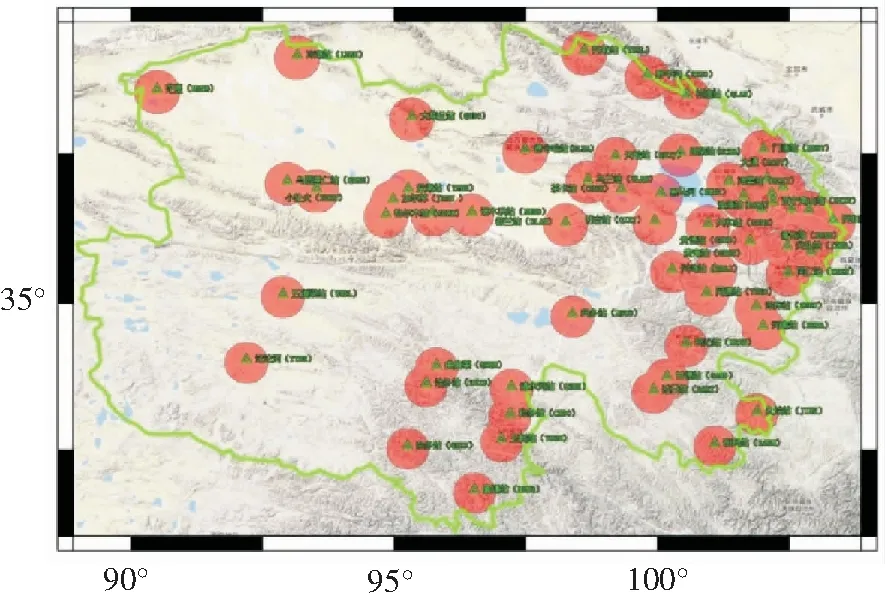
图3 青海省CORS站覆盖范围Fig.3 Coverage area of CORS station in qinghai province
1.2 GAMIT/GLOBK表文件及平差解算
GAMIT/GLOBK在数据解算之前,首先要根据测站的观测时间对“tables表文件”进行配置,表文件主要包括系统自带的表文件和待更新的表文件2类[8-9]。由于文中观测数据是2017年,在处理之前分别对系统自带的表文件,系统定期更新的表文件及GAMIT/GLOBK控制表文件进行了更新,见表1,表2,表3.
1.2.1 系统自带的主要表文件
系统自带的主要表文件更新内容包括:天线高及相位中心偏移模式参数,大地水准面参数,海潮文件参数,周跳自动探测和修改命令参数,P1-C1,P1-P2码差等参数的更新。具体参数见表1.
1.2.2 GAMIT/GLOBK平差解算
分别采用分步处理与批处理方式进行解算,具体解算流程如图4所示。

表1 系统自带的主要表文件

图4 文中GAMIT/GLOBK解算流程及解算命令Fig.4 GAMIT/GLOBK solution process and solution command
1.2.3 系统定期更新的表文件
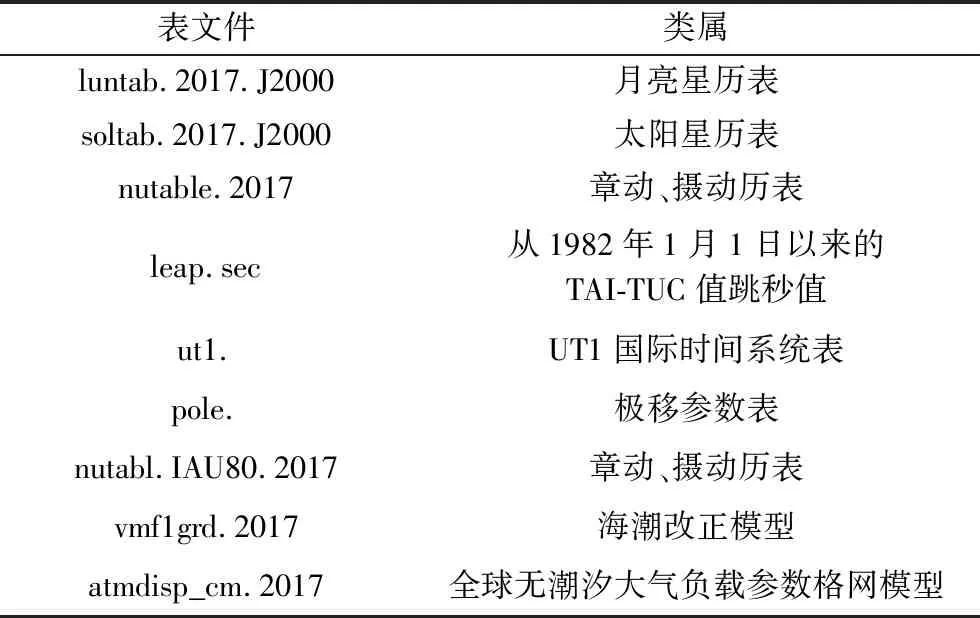
表2 系统定期更新的表文件
1.2.4 GAMIT/GLOBK控制文件

表3 GAMIT/GLOBK控制文件
2 GAMIT/GLOBK精度评定模型
2.1 标准化均方根误差NRMS精度评定
标准化均方根误差NRMS值用来表示单时段解算出的基线值偏离其加权平均值的程度。NRMS值越小,基线解算的精度越高[10],其计算公式如下
(1)

2.2 基线重复性
基线向量重复性和相对重复性[11-12]计算公式如下
Rl=
(2)
(3)

(4)
以基线重复性为观测值,线性拟合求出重复性[13-14]常数部分和与边长成比例的部分
R=(Rm-bLm)+
(5)
式中m为总基线数;Rm为基线重复率算术平均值;Lm为基线长度算术平均值。
2.3 点位精度评定
对于测站GAMIT/GLOBK的坐标解算精度采用均方根RMS值评定,公式如下
(6)
式中 Δi为第i个测站GAMIT/GLOBK解算结果;Δ为TBC解算真值;n为测站数。
3 解算参数配置
1)process.defaults中修改“set sint”为5 s,“set nepc”为2 160 s,set.aprf=control.apr;
2)sestbl.中修改基线类型为LC_HELP,筛检因子Decimation Factor=1,Interval zen=2,卫星高度角改为15°,Use met.grid=N,Use otl.grid=N,Use atml.grid=N,Tides applied = 23;
3)station.info手动更新待解算点测站信息,天线高改化到天线相位中心LEPHC;
4)sittbl.中修改控制点约束平面0.02,高程0.05,待求点约束平面0.05,高程0.05;
5)lfile.中对于IGS站坐标从itrf08.apr中提取,对于待解算站坐标利用双差定位法提取;
6)GLOBK_comb.cmd中禁用eq_file,增加make_svs@.svs Z,改变prt_opt GDLF CMDS,改变org_opt PSUM CMDS GDLF,启用所有控制点参与平差use_site all;
7)glorg_comb.cmd修改stab_it网平差迭代次数为5次,禁用source.
4 解算精度评定
GAMIT/GLOBK基线解算及平差结束后生成结果[15-16]主要包括:H-file基线松弛解(h0526a.17146),O-file约束解(o0526a.146),Q-file过程记录文件(q0526a.146),GLOBK坐标平差文件(GLOBK_0524.org),针对上述文件进行精度分析。
4.1 标准化均方根误差NRMS精度统计
解算完后,以单天解给出了18个年积日的NRMS精度值,从表4可以看出,最大的为0.193 29E+00,最小的为0.180 08E+00,根据国内外0.25的数据处理经验[17],所有单天的NRMS精度值均小于0.25,说明单时段解算出的基线值偏离其加权平均值的程度较小,处理过程中周跳得到了较好地修复,基线估算精度较高,解算质量指标符合要求。

表4 测站NRMS精度统计
4.2 天空图统计
LC phase Residual[18]表示接收机接受信号的好坏,由于测站较多,以测站JB70为例给出解释,如图5所示,该测站信号整体趋势在-20~+20 mm之间围绕蓝色收敛线波动,收敛趋势平顺,并且逐渐接近于0,测站RMS值为9.1 mm,说明解算过程中天线相位模型引用正确,信号没有受到较强的电磁干扰,收敛情况较好。
4.3 基线重复率
以单日解解算出了18个年积日的基线重复率,从表5,图6可以看出,绝对重复性最大值为0.006 814 51 m,最小的为0.000 309 02 m,精度在mm级,相对重复性最大值为1.000E-08,最小的为-4.736E-10,相对精度达到了10-8,可见,基线解算结果精度较高。
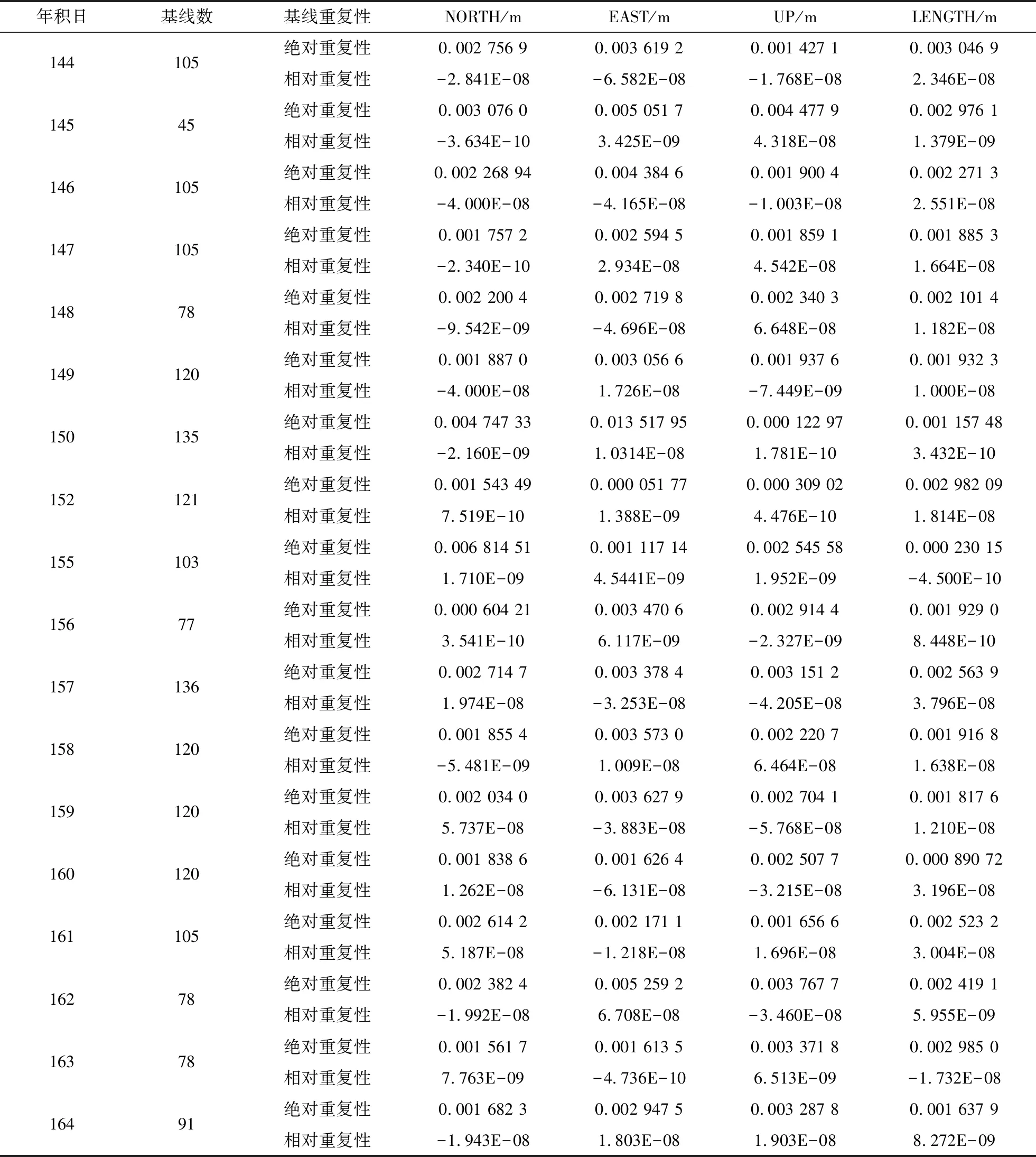
表5 基线重复率

图5 JB70测站LC phase Residual收敛情况Fig.5 Situation of LC phase Residual convergence at the JB70 station
4.4 GAMIT/GLOBK精度检验
对测区106个像控点采用GAMIT/GLOBK进行解算合格后的结果,直接采用魏子卿研究员[20]
关于“中国大陆速度场”一文中给出的中国大陆3°×3°格网平均速度。将ITRF08框架下得到的空间直角坐标,换算到CGCS 2000坐标系。转换过程中分别利用公式(8)、公式(9)将2017.***历元转换到2 000.000历元,将ITRF 2008框架坐标转换到ITRF 97框架坐标,这样就得到了CGCS 2000坐标[19]。
为了验证GAMIT/GLOBK解算的最终点位三维坐标,用另外一组以摄区高精度CORS站作为控制点,平差后cm级的解算成果对文中的解算精度进行检验。由上图7可知,106个测站N方向残差值在0.12 m附近波动,E方向残差值在0.10 m附近波动,U方向残差值在0.04 m附近波动,经公式(6)计算得出RMSN=0.119 m,RMSE=0.104 m,RMSU=0.042 m,U方向解算精度达到了cm级,平面方向解算精度在dm级。
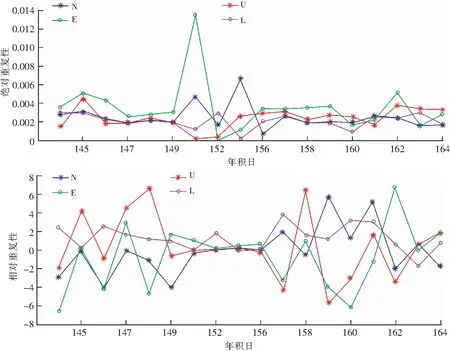
图6 N/E/U三分量基线重复性Fig.6 Baseline repeatability about N/E/U three component
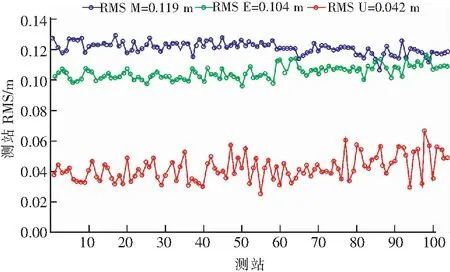
图7 测站RMSFig.7 Station RMS
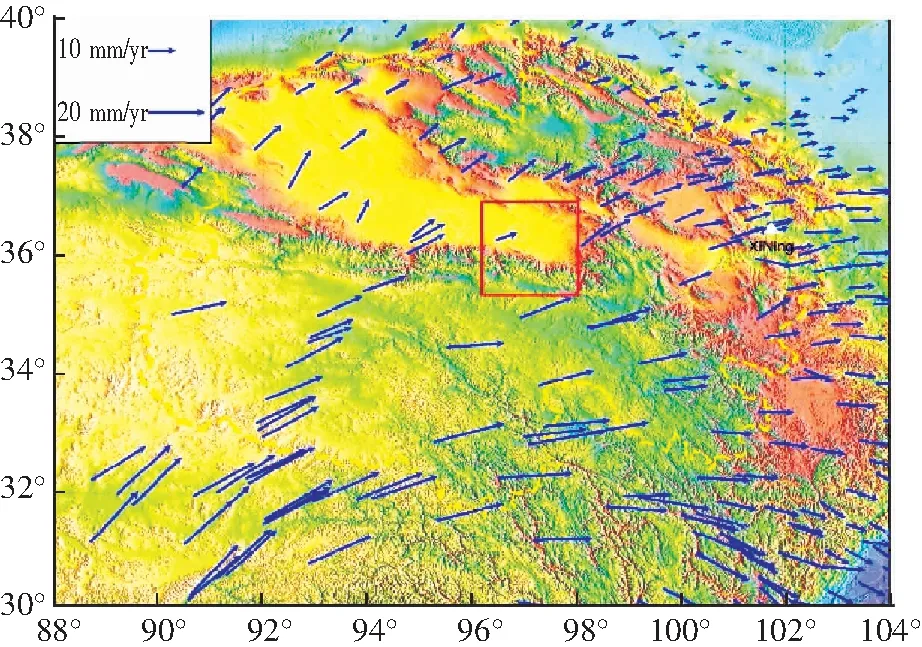
图8 青海省GPS速度场(基于欧亚板块)Fig.8 GPS velocity in Qinghai Province relative to Eura Reference Frame
4.5 CORS站偏差改正
4.4中平面方向出现dm级的解算精度初步估计,是由于受测区速度场模型精度影响。图8应用GMT[21]软件,结合青藏高原东北缘水平运动GPS速度场[22-23],给出了测区基于欧亚板块的青海省GPS速度场,图中红色矩形框为文中测区范围,从图可以看出,在测区范围内只有一个已知速度变化的测站,缺少起算点数据,无法应用局域欧拉矢量法内插速度,所以直接引用魏子卿速度场模型。测区所有站点都采用统一的速度场模型势必会引入系统性的共模误差[24]的影响,即在坐标分量上表现出整体性偏移,为了消除这一误差的影响,采用距离测区150 km范围内的3个省级CORS站进行共模误差的提取及分析。
根据图3结合测区情况,选取DGLE,YANH,GERM等3个CORS测站,利用同一Gamit/GLOBK参数解算模型,对CORS站点进行解算,将解算转换后的最终结果与CORS已知测站成果进行对比分析,得出CORS站残差为RMSN=0.126 m,RMSE=0.124 m(上述解算中高程精度已满足要求,不再进行改正分析),故将这一值,确定为本测区共模误差改正值,将这一改正值改正到测区所有像控点坐标值中。
从图7也可以看出,所有像控点N,E方向表现出整体性偏移,而且该偏移值在0.119 m与0.104 m之间浮动,浮动范围±0.002 m,如果将CORS站残差值改正至上述测站整体偏移中,那么所有测站N,E方向精度将大幅度提高。图9是根据CORS站残差改正后的测站残差,从图10可以看出,经过改正后,所有测站N,E方向残差值均有所减小,N方向残差在-0.5 cm至2 cm之间浮动,E方向残差在-3 cm至-0.6 cm之间浮动,经过改正后的测站RMSN=-0.7284 cm,RMSE=-1.995 cm,RMSU=0.042 m,说明经过CORS站残差改正后水平方向精度达到了亚厘米级,对于1∶1万的像控精度,上述解算精度已满足要求。
5 结 论
1)对解算策略及解算精度指标进行的分析发现:GAMIT/GLOBK基线解算所有单天的NRMS精度值均小于0.25,基线重复率相对重复性精度达到了mm级、绝对重复性精度达到了10-8;通过TBC成果对GLOBK坐标平差精度进行评定得出,解算结果RMSN=0.119 m,RMSE=0.104 m,RMSU=0.042 m,N,E方向所有点位均表现出整体性偏移,并且该偏移值均值分别为11.9,10.4 cm.
2)为了解决这一偏移的影响,通过采用距离测区150 km范围内的3个省级CORS站进行该整体性偏移量的提取,得出CORS站整体性偏移改正量残差为RMSN=0.126 m,RMSE=0.124 m,将这一改正量改正到测区所有像控点坐标值中。经过改正后的所有测站RMSN=-0.728 4 cm,RMSE=-1.995 cm,RMSU=0.042 m,说明经过CORS站残差改正后水平方向精度达到了厘米级,高程精度达到了厘米级。解算结果满足文中1∶1万外业像控点要求,为青海大部门无基准、无控制的地区进行GPS数据解算工作的可行性提供了实践参考,达到了在大量减少外业工作量的同时控制成本的目的。
