Projection pursuit model of vehicle emission on air pollution at intersections based on the improved bat algorithm
2019-10-15HuQizhouDengWeiTanMinjiaBianLishuang
Hu Qizhou Deng Wei Tan Minjia Bian Lishuang
(1 School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China)(2 School of Transportation, Southeast University, Nanjing 210096, China)
Abstract:The projection pursuit model is used to study the assessment of air pollution caused by vehicle emissions at intersections. Based on the analysis of the characteristics and regularities of vehicle emissions at intersections, a vehicle emission model based on projection pursuit is established, and the bat algorithm is used to solve the optimization function. The research results show that the projection pursuit model can not only measure the air pollution of vehicle emissions at intersections, but also effectively evaluate the level of vehicle exhaust emissions at intersections. Taking the air pollution caused by vehicle emissions at intersections as the research object and considering the influence factors of vehicle emissions on air pollution comprehensively, the evaluation index system of vehicle emissions at intersections on air pollution is constructed. Based on large data analysis, a prediction model of air pollution caused by vehicle emissions at intersections is constructed, and an improved bat algorithm is used to realize the assessment process. The application results show that the prediction model of vehicle emissions at intersections can define the degree of air pollution caused by vehicle emissions, and it has good guiding significance and practical value for solving the problem of air pollution caused by vehicle emissions.
Key words:intersection; vehicle emission; pollutants; projection pursuit; bat algorithm
Vehicle emission contains hydrocarbons (CnHm), carbon monoxide (CO), nitrogen oxides (NOx), lead (Pb), sulfur dioxide (SO2) and particulate matter (PM), and many of which are damaging the health of humans[1-2]. Hence, how to monitor and reduce air pollution caused by vehicle emissions effectively has become one of the hot issues of current research. In order to monitor vehicle emission factors and total emissions, some effective emission analysis models have been proposed. MOBILE is a classic macroscopic emission analysis model, which is typically used to estimate vehicle emissions according to the average speed in the wide-area[3-4]. Kheirbek et al.[5]estimated PM2.5-attributable mortality and morbidity from on-road vehicle generating air pollution in New York City using high-spatial-resolution emissions estimates. Doolan and Muntean[6]presented a novel approach to reduce vehicle emissions—EcoTre. Schneidemesser et al.[7]found the significant potential for NO2reductions. The research on vehicle emission in China has also achieved certain results. Zhao et al.[8]derived pollutant mission factors from mixed vehicles, cars, and taxis. ETC (electronic toll collection) testing shows that the design satisfies severe emission regulations with greater sustainable and environmentally friendly practical application[9]. In fact, when calculating the emission of urban motor vehicles, although the research scope of vehicle emission models in China has gradually shifted from laboratory to real road emissions, there are relatively few achievements in this field. Therefore, this paper focuses on the evaluation of vehicle emissions pollution at urban intersections.
Projection pursuit (PP) is a new statistical method for processing and analyzing high-dimensional data. It has been applied in many fields, such as environmental quality assessment, atmospheric science and water conservancy planning. Jiang et al.[10]presented a general approach for coherency detection in bulk power systems using the PP theory. Pires et al.[11]developed an expansion of space-distributed time series by statistically independent uncorrelated sources. In this paper, the projection pursuit model based on the improved bat algorithm is proposed to evaluate and analyze air pollution caused by vehicle emissions at intersections.
1 Measurement Index for Vehicle Emission Pollution at Intersections
Vehicle exhausts contain more than 100 different compounds. The main pollutants are harmful substances such as CnHm, CO, NOx, Pb, SO2and PM, as well as secondary pollutants produced by photochemical reactions[12]. The main atmospheric pollutants at intersections are shown in Tab.1.
Tab.1Measurement index of vehicle emissions on air pollution

PollutantsFirst level indexSecondary level indexGas pollutantsCOxI1THCI2NOxI3SOxI4Secondary derivativepollutantsCO2I5NOI6SO2I7Solid pollutantsPbI8PM2.5I9PM10I10TSPI11
2 Projection Pursuit Model of Vehicle Emission at Intersections
In this section, based on the projection pursuit algorithm, we establish the projection pursuit evaluation model of vehicle emissions on air pollution at intersections.
Suppose that the measured value of intersectioniisxij(i=1,2,…,n;j=1,2,…,m) under the measurement indexj;nis the number of intersections;mis the number of indicators for the emissions of air pollution to the vehicle, and then we obtain the original matrixX=(xij)n×m. The algorithm for the model is as follows:
Step1Normalization of sample data for air pollution at intersections. We normalize the sample data by the following formula before modeling:
yij=1-xij·[maxxij+minxij]-1
(1)
Suppose thata={a1,a2,…,a3} is the unit projection vector, and thenyijis an intersection-dimensional eigenvalueZi.
(2)
Step2The projection index function of vehicle emissions on air pollution at intersections. The inter-class distance function for the assessment of air pollution by vehicle emissions at intersections is defined as:
(3)
The inter-class density function for the assessment of air pollution by vehicle emissions at intersections is defined as:
(4)

The projection index function of vehicle emissions about air pollution at intersections is obtained:
F(a)=f1(a)·f2(a)
(5)
Step3Optimized projection index function of vehicle emissions on air pollution at intersections. The objective function of vehicle emissions on air pollution at intersections is as follows:
maxF(a)=f1(a)·f2(a)
(7)

(8)
3 Projection Index Function based on Improved Bat Algorithm
Projection function optimization plays a deciding role in the success of the projection pursuit model. In this section, we apply the improved bat algorithm to the projection function optimization to assess the air pollution caused by vehicle emissions and obtain the optimal solution of the evaluation model.
In order to prevent the search solution from falling into the local optimal solution, the updated formulas for loudnessAiand rateriof pulse emissions are as follows:
(10)
whereαis the attenuation coefficient of loudness and it usually defaults to 0.9;βi∈[0,1] represents a random attenuation coefficient of loudness that obeys uniform distribution. The search update formula is as follows:
Q=1-exp(-|p-fmax|)δi
(11)
(12)

4 Case Analysis
In this section, 10 intersections (recorded as cross1, cross2,…, cross10) in a specific area of Nanjing are taken as the study object. The monitoring value of 10 intersection was obtained by field data collection (see Tab.2). The monitoring values of each indicator of 10 crossings are substituted into the evaluation model.
4.1 Fitness curves of projection vectors function
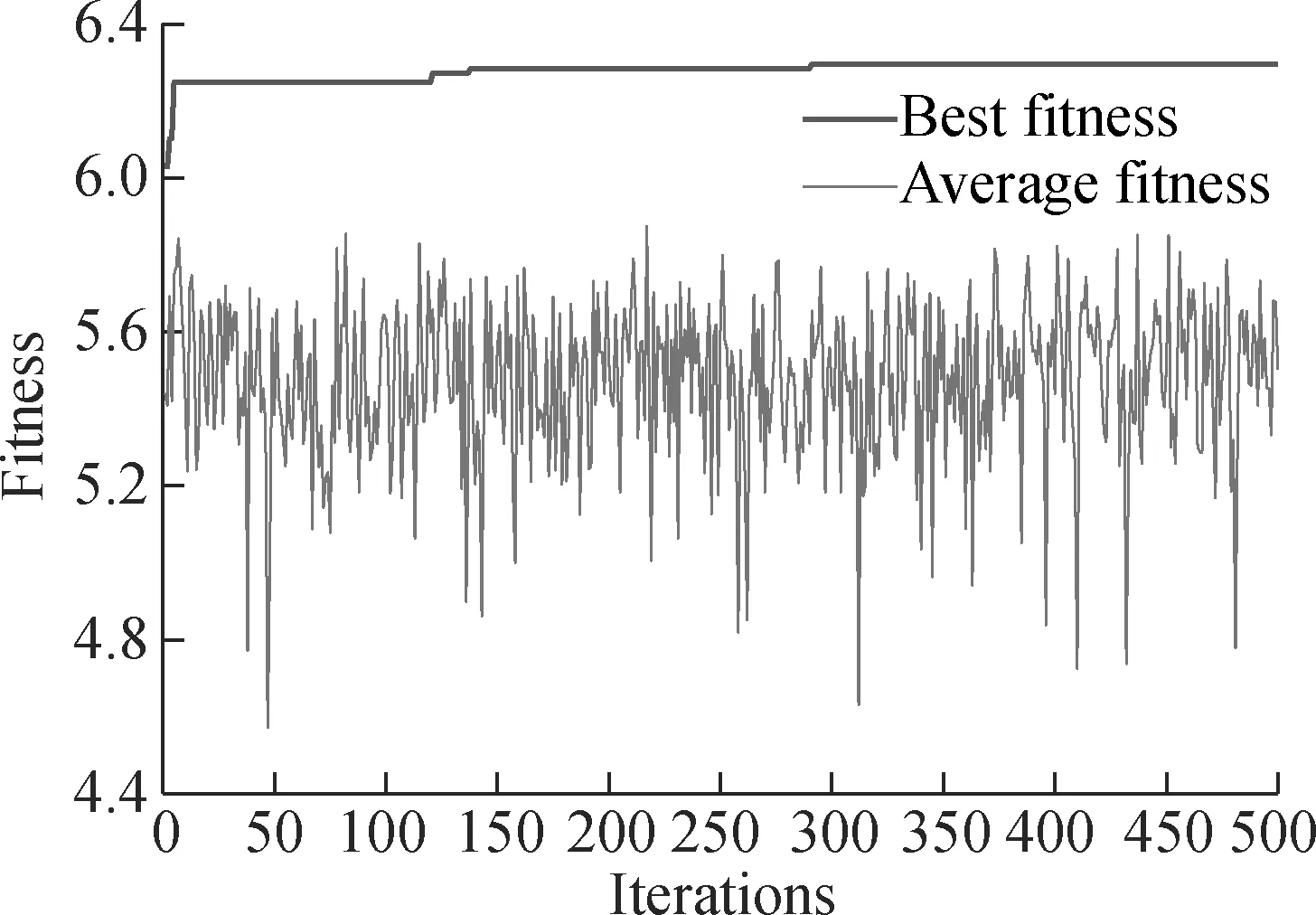
According to the bat algorithm of the projection function proposed in Section 3, the search process based on the improved bat algorithm and the standard bat algorithm is implemented on the Matlab platform. We first use the PSO algorithm to solve the proposed mode, and then use the BA algorithm to solve the proposed model. After the iteration of the operation, the curves of projection vector fitness are obtained, as shown in Fig.1.
As can be seen from Fig.1, the improved BA is better than the standard BA and PSO in the optimization result.
4.2 Error comparison between three algorithms
In this section, we will calculate the assessment error of the pollutant emissions from 10 intersections under the three algorithms and the measured data to verify the effectiveness and superiority of the proposed improved bat algorithm. The results are shown in Tab.3.
It can be seen from Tab.3 that the average error rate of the projection pursuit analysis model is 6.098 6% using the PSO algorithm. Therefore, in terms of accuracy, the IBA is better than the PSO and the standard BA, and it is feasible for assessing the air pollution.
5 Conclusions
1) The impact of vehicle emissions on air pollution is effectively evaluated and analyzed. A projection pursuit model is also proposed based on the improved bat algorithm.
2) The results of the case analysis show that the proposed model is superior to the standard BA in convergence speed and recognition accuracy.
3) This paper provides a theoretical basis and technical support for improving urban air quality and building low-carbon transportation. It also provides a novel method and ideas for vehicle emissions-related research.
(a)

(b)

(c)
Tab.3Comparison of error rates using different optimization algorithms

%
杂志排行

Journal of Southeast University(English Edition)的其它文章
- Travel time prediction model of freewaybased on gradient boosting decision tree
- Rolling contact fatigue nondestructive testing system for a bearing inner ring based on initial permeability
- Delay-performance optimization resource scheduling in many-to-one multi-server cellular edge computing systems
- Image denoising method with tree-structured group sparse modeling of wavelet coefficients
- Effect of waste concrete with different strengthon mechanical properties of recycled fine aggregate mortar
- Experimental investigation of oil particles filtration on carbon nanotubes composite filter