基于模糊PID控制的水肥一体化实验系统设计
2019-10-15李晓晓魏文庆
李晓晓, 宋 健, 魏文庆
(1.山东科技大学 机械电子工程学院,山东 青岛 266590; 2.潍坊学院 机电与车辆工程学院,山东 潍坊 261061)
0 引 言
随着我国现代化农业发展,可溶性固体和液体肥料在农业生产中已得到推广和普及。水肥一体化系统能将可溶性固体或液体肥料配兑成的肥液与水在管道内混合均匀,调整到适宜浓度,定时和定量输送给作物,达到作物优质高产[1]。
随着现代智能技术的发展,单片机和PLC等控制器与传感器技术运用到水肥一体化系统中,国内一些学者和技术研究员对水肥一体化系统进行研发。吴景来等[2]基于PLC创建模糊控制模型,用于调整水肥浓度,但精度要求不高。PLC具有稳定性高、编程灵活等一系列优点,在工业控制行业上已得到广泛的应用[3-4]。本文基于PLC控制的稳定性,在传统PID基础上结合模糊控制来精准调控肥液浓度EC值来满足农作物不同生长阶段的水肥浓度,节省肥料,促进生长[5-7]。
1 系统构成及原理
本系统主要由控制系统、检测装置、混肥装置、辅助装置等构成,如图1所示。
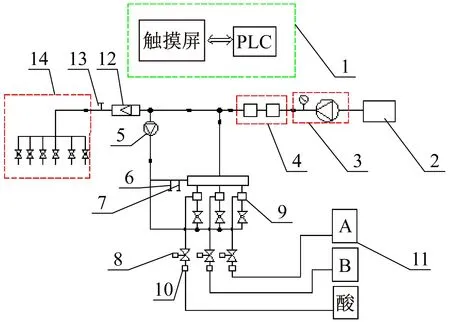
1-控制系统,2-水源,3-恒压供水,4-过滤装置,5-混肥泵,6-EC传感器,7-pH传感器,8-电磁阀,9-文丘里射流器,10-Y型过虑器,11-水桶,12-涡轮流量计,13-压力传感器,14-灌溉区域
图1 系统构成图
控制系统包括控制器和触摸屏,控制器为西门子PLC S7-200SMART,CPU类型为ST20,有2个高速脉冲输出,自带1个RS-485通信接口,便于触摸屏连接,同时扩展模拟量输入模块AE04,带4个模拟量输入。触摸屏为昆仑通态触摸屏,型号为TPC7062TX(KX),配有RS-485通信口,便于与PLC通信,可以控制与监察系统[8-9]。混肥装置包括文丘里射流器、混肥泵、肥料桶(250 L)和电磁阀(DC24 V)。辅助装置包括恒压供水装置、过滤装置以及扩散硅芯片压力传感器(量程为0~6 MPa)和涡轮流量计(脉冲输出),用来设置进水压力过滤水源,并检测出水压力和流量。
水经管道流经3个并联文丘里射流器,在窄处,产生压差,控制电磁阀开启从肥料桶吸肥,设定两路吸肥,一路吸酸。水和肥液经文丘里混合均匀后,在混肥管道恒压二次混合,此过程会循环流经检测装置,内安有管道插入式塑料EC传感器(量程为0~4 ms/cm)和工业pH传感器(量程为0~14pH),检测EC和pH值[10-11],传送信号给PLC控制电磁阀开启。
2 系统控制方法设计
2.1 EC调控模型分析
参考实际的施肥状况,认为EC调控可以用一阶滞后模型。系统实际运行时,由于进水压力有恒压系统调控,流量和压力认为基本不变,水肥一体化装置内的肥液体积VL是不变的,可以假定水肥一体化装置内肥液的浓度和出水管中的相等,将进出水口的流量都看成相同常量为Q0。同时,E0表示进水口中清水的EC值。装置使用的并联式文丘里可同时对2个肥料桶的肥液进行吸取,N(t)表示吸肥电磁阀开启的占空比。设定2个吸肥路桶内肥液EC值相同,用EL表示,QW为电磁阀一直开启的情况下文丘里的最大吸肥量。由于EC值与肥液浓度成正比,根据质量守恒定理,有:
(1)
实际运行过程中,通过恒压供水系统测试不同压力下出口流量和电磁阀全开时的吸肥量,由于压力在50 kPa以下,管道未充满,测试从50 kPa开始,见表1。
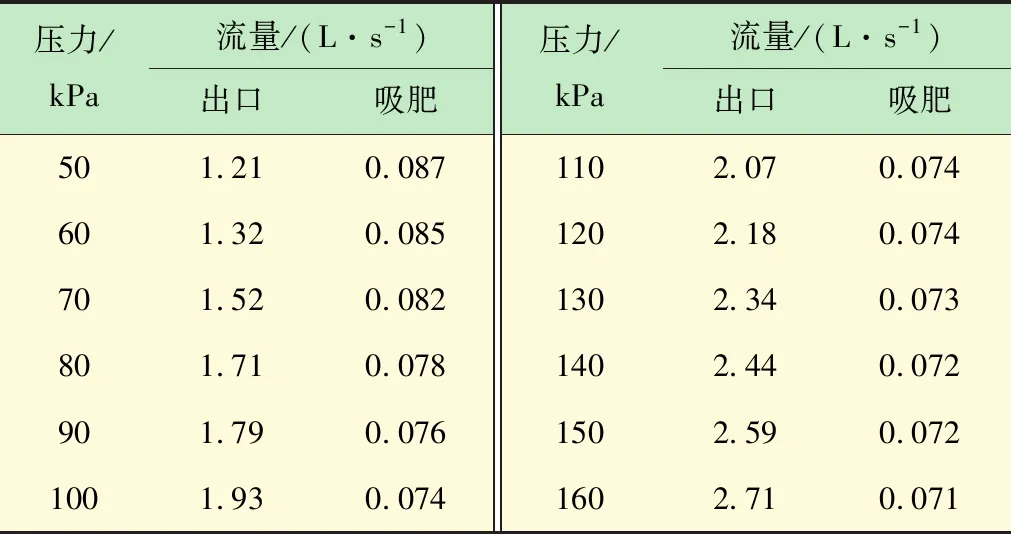
表1 流量检测表
根据操作经验,压力选择在100 kPa,此时进出口流量Q0=1.93 L/s,电磁阀吸肥流量QW=74 mL/s,清水EC值E0为0,肥料母液EC值EL为4 ms/cm,运行时水肥机内液体积为15.4 L,代入式(1),经拉普拉斯变换,得:
(2)
由于系统有8 s的滞后,由式(2)可得传递函数为
(3)
2.2 传统PID控制器
传统PID控制器的控制为:
(4)
e(t)=r(t)-y(t)
(5)
式中:u(t)为控制信号;e(t)是误差信号;r(t)是输入信号;y(t)是传感器检测转换的输出信号;Kp,Ki,Kd分别是PID控制的比例系数、积分系数和微分系数。使用N-Z整定法得出传统PID器的Kp=1.5,Ki=0.189,Kd=2.5[12]。
施肥过程中,传统PID算法简单,有较好地鲁棒性,但其参数整定方法复杂,且参数固定对水肥一体化这种大惯性和参数时变系统调控性能欠佳[13-15]。
2.3 模糊PID控制器
模糊PID控制是在传统PID控制基础上运用模糊理论将专家或操作者的经验转变为模糊控制规则存入模糊规则库中,根据传感器检测的实时输入量,进行模糊推理,自动调整PID的3个参数,实时得到最优参数,构成模糊PID控制算法,以对系统进行实时和精准的控制,如图2所示。
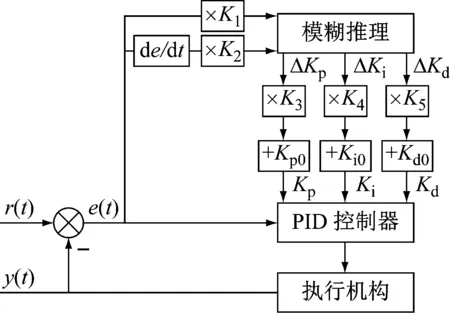
图2 模糊PID控制流程图
模糊控制采用2个输入量,浓度偏差e和浓度偏差变化率ec,以及3个输出量,比例系数变化值ΔKp、积分系数变化值ΔKi和微分系数变化值ΔKd。其输入量和输出量用7个模糊子集进行描述, 即 NB(负大)、NM(负中)、NS(负小)、ZE(适宜)、PS(正小) 、PM(正中)、PB(正大),其量化论域都为{-3,-2,-1,0,1,2,3}。
浓度偏差e的基本论域为[-1,1],量化比例因子K1为3,浓度偏差变化率ec的基本论域为[-0.3,0.3],量化比例因子K2为10;比例系数变化值ΔKP基本论域为[-1,1],量化比例因子K3为1/3;积分系数变化值ΔKi基本论域为[-0.3,0.3],量化比例因子K4为1/10;微分系数变化值ΔKd基本论域为[-2,2],量化比例因子K5为2/3。设置Kp0为1.5,Ki0为0.189,Kd0为2.5。可以计算出Kp、Ki和Kd。根据专家经验以及系统需求制定模糊规则,见表2。
3 仿真与实验分析
3.1 MATLAB仿真
运用MATLAB的FIS模块,由于输入输出的模糊论域都一样,都选用三角形隶属函数,如图3所示。
由于本文为两输入-三输出模糊PID控制器,其规则语句为: “若eis NB Andecis NB,则ΔKpis PB And ΔKiis NB And ΔKdis PS”。根据表2,在FIS模块设置49条规则,并导出模糊规则离线查询表。采用面积重心法解模糊,在Simulink模块搭建传统PID和Fuzzy PID施肥系统模型,如图4所示。设置系统单位阶跃信号为1,启动运行,其仿真曲线如图5所示。结果显示传统PID超调量大,达到稳态慢,模糊PID控制比传统PID在超调量和达到稳态时间有明显提升,即超调量减少8%,达到稳态时间减少20 s。

表2 ΔKp、ΔKi、ΔKd模糊规则表
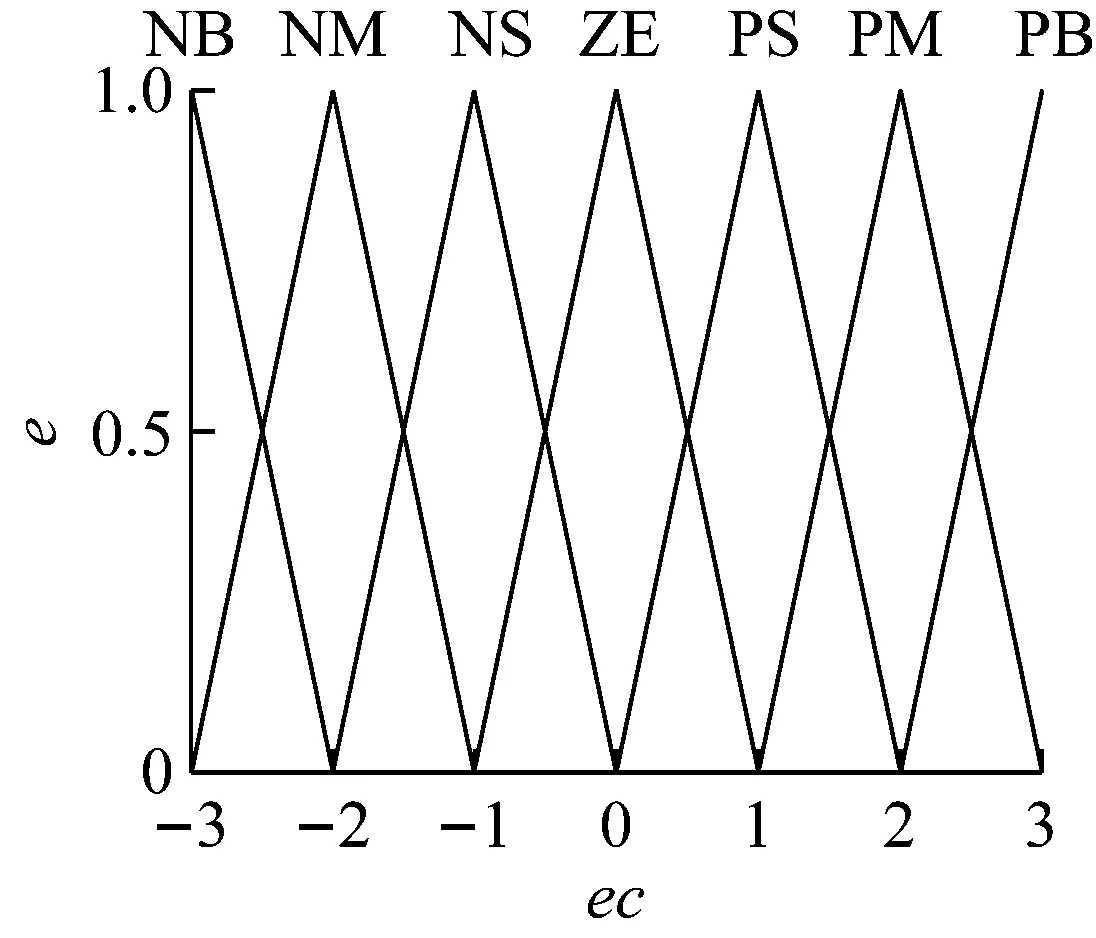
图3 隶属函数图
3.2 施肥实验
运用软件STEP 7-MicroWIN SMARTST在西门子PLC S7-200SMART中导入模糊规则离线查询表和模糊PID控制器程序。运用基于Windows平台的MCGS组态软件构造和生成上位机监控系统,系统启动,进入初始界面,用户登录后,进入监控主界面,可显示EC、pH、压力和流量,运行时间和距离下次运行的时间,根据需求手动或自动运行,自动模式通过参数设定设定运行模式,启动运行。同时可以查看历史运行数据,主监控界面如图6所示。

图4 模糊PID控制和传统PID控制模型
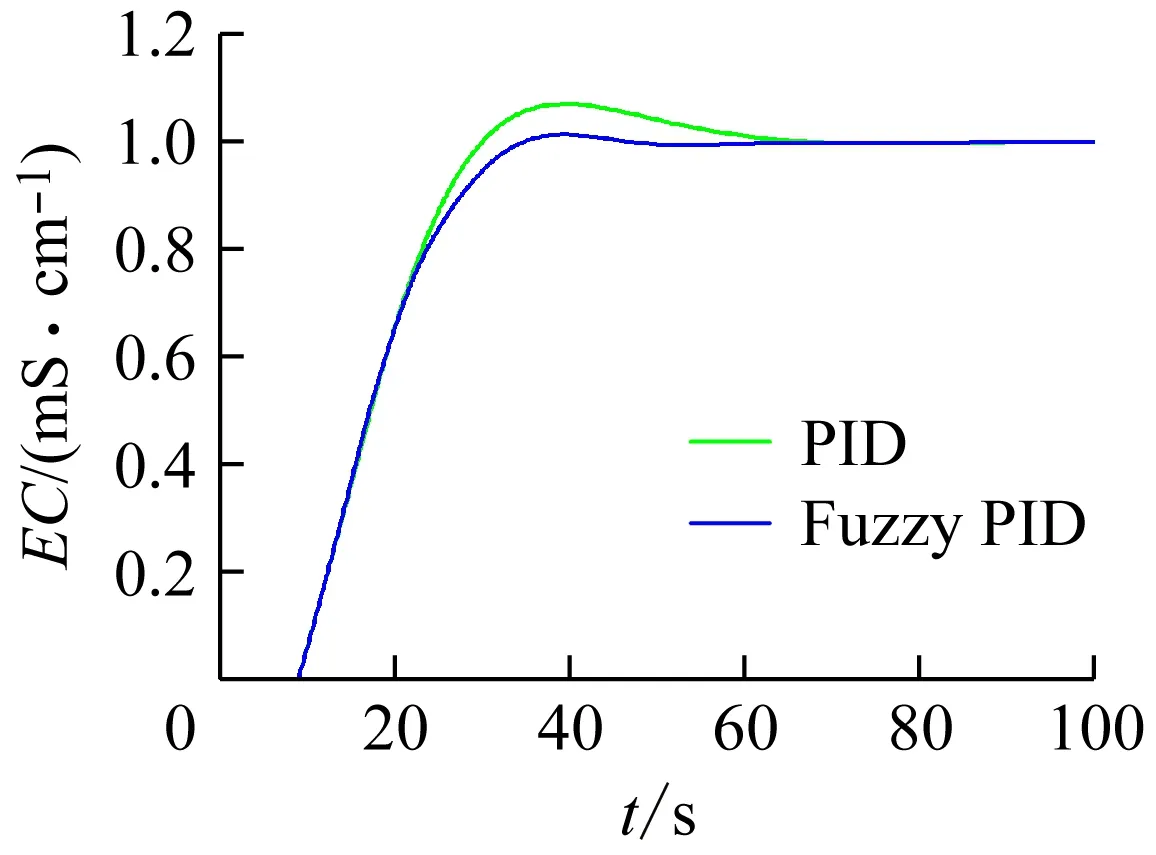
图5 单位阶跃响应曲线
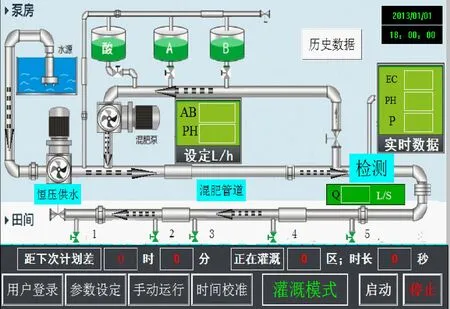
图6 主监控界面
系统在试验基地测试,实验水源EC值为0,肥料选用硫酸二氢钠,配置肥液浓度为4.0 ms/cm,运用恒压供水系统,调节管道压力在0.1 MPa压力下,设定EC值为1.0 ms/cm,在触摸屏设定参数启动,实验结果显示系统超调量小于2%,并在60 s内到达稳定,符合系统要求,绘制EC变化曲线如图7所示。

图7 实验EC变化曲线
4 结 语
本文建立了基于EC调控的一阶滞后线性统模型,在传统PID基础上构建模糊PID,在MATLAB上仿真,结果显示模糊PID比传统PID在超调量和稳态时间方面有明显改善。
基于PLC运行的稳定性,在PLC导入模糊PID控制器,实验结果显示系统在超调量和稳态时间方面与仿真相符,且符合系统要求,证明该系统可行。