STATCOM自适应分数阶重复控制的研究
2019-10-15王素娥燕晨阳郝鹏飞
王素娥, 燕晨阳, 郝鹏飞
(陕西科技大学 电气与信息工程学院,西安 710021)
0 引 言
分布式发电、大型轧钢机、电力机车等负荷的运行产生了低次谐波,严重影响设备正常使用。静止同步补偿器(STATCOM)是交流柔性输电的核心装置之一,通过向电网注入补偿电流抵消负载产生的无功与谐波,具有调节速度快、成本低、体积小等优点,已经越来越多地应用于风电场和光伏电站[1-4]。
三相电压型STATCOM的控制方法中,传统PI控制简单易实现,但抑制谐波的能力较差,对指令补偿电流跟踪精度较低[5]。谐振控制器理论上在谐振频率处具有无穷大增益,在谐振频率处可以实现对信号的无静差跟踪。文献[6]中采用多重比例谐振控制器并联控制方式,有效抑制了电网的各次谐波,但多重谐振项参数设计复杂。重复控制在基波频率及谐波频率处都产生较高的增益,可以视为多个谐振控制器并联的形式,进而对谐波具有好的抑制效果[7]。
国标规定电力系统正常运行时频率会存在(±0.2~±0.5) Hz偏差,在电力系统不正常运行时偏差则达到±1 Hz,而且基波的频率偏差会在谐波频率处成倍放大。当电网频率波动时,控制器谐振频率会偏离实际电网频率,导致其增益下降,补偿精度降低。文献[8-9]中通过实时改变数字系统采样频率保证重复控制器内模环节的相位滞后阶数与电网频率的整数倍关系,而采样频率的不断变化必然会使控制器设计复杂化;文献[10]中引入内模系数Q将重复控制各谐振点变为准谐振,增加了控制器对电网频率的适应能力,但算法受准谐振控制器的带宽限制,无法在频率波动较大时保持控制精度。
本文针对传统重复控制器对电网频率波动适应性差的问题,采用一种自适应分数阶重复控制策略。使用基于拉格朗日插值多项式的线性近似方法实现重复控制内模的分数阶滞后环节,根据锁相环得到的实时电网频率,在线计算内模参数,使控制器谐振频率动态跟踪电网频率变化,提高静止同步补偿器的补偿性能。通过仿真,证明所提方案的有效性与可行性。
1 系统原理与结构
图1是STATCOM单相等效电路,图中:L、R为交流侧电感、线路等效电阻;C为直流侧电容;us、uab、is分别为交流电压、变流器输出电压、变流器输出电流。
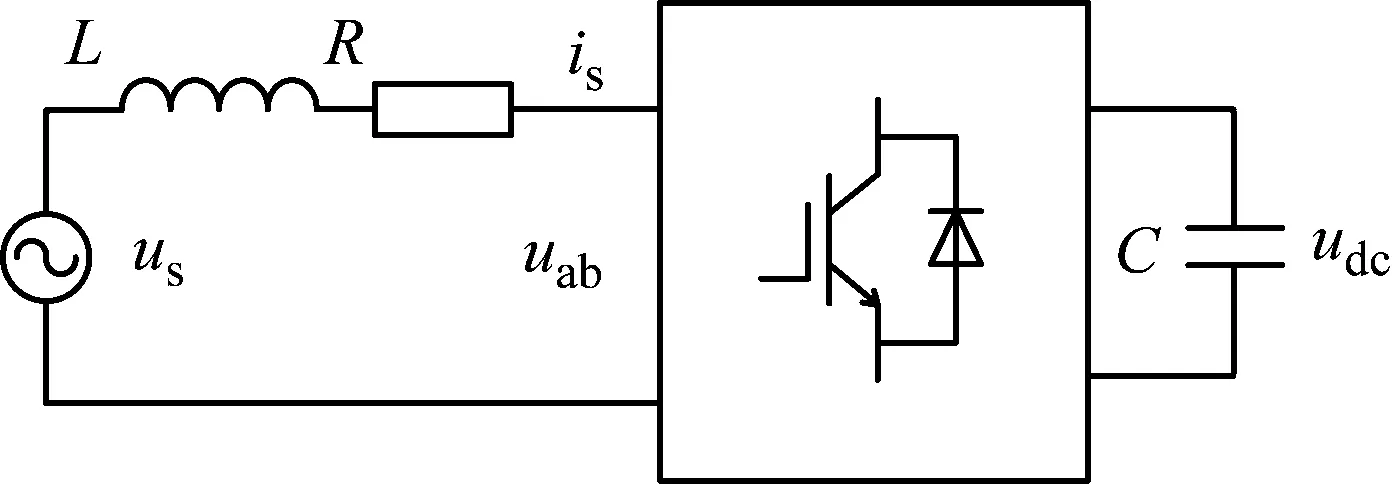
图1 STATCOM单相等效电路
根据KVL定理,可得:
(1)
对式(1)拉氏变换,可得STATCOM的数学模型:
(2)
可知,在交流电压us一定的情况下,通过相应算法控制变流器输出电压uab,即可以产生期望的补偿电流is。
本文采用的三相STATCOM系统结构如图2所示。控制系统为双闭环控制结构,检测负载电流iload得到指令补偿电流,经电流环控制器调节变流器输出电流iSTATCOM,进而补偿负载产生的谐波。其中θ为锁相环得到的网侧电压相位。
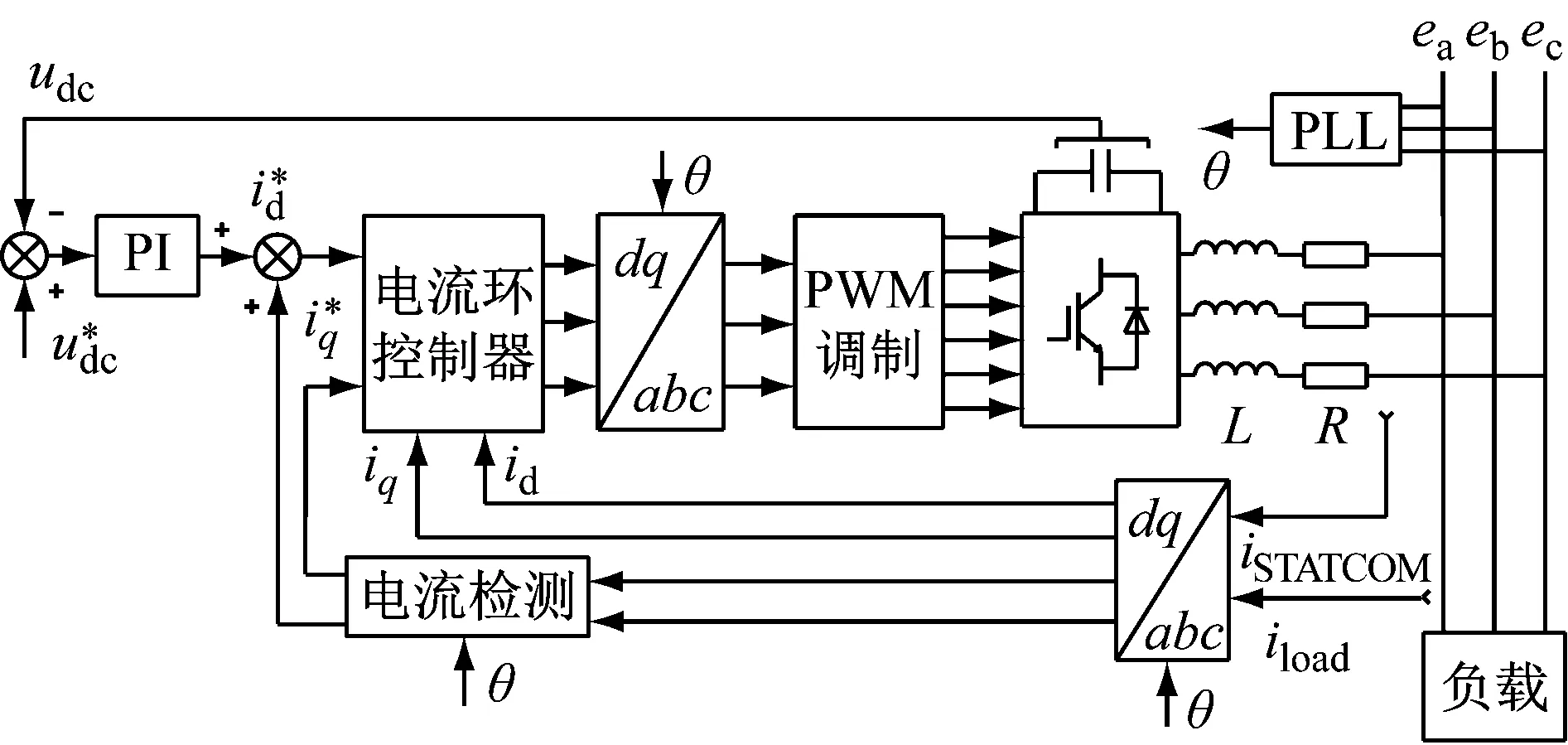
图2 STATCOM系统结构图
2 自适应分数阶重复控制器设计
内模原理指出在闭环系统稳定的前提下,被控对象无静差跟踪输入信号的充分必要条件是控制器内包含输入信号产生的模型[11]。重复控制是一种基于内模原理的控制策略,其传递函数可以展开为
(3)
可以看到,重复控制可以等效为若干谐振环节相并联的形式,理论上在各谐振点nω处都具有无穷大的增益,可以实现对该频率下正弦信号的无静差跟踪。
图3(a)为STATCOM电流环结构框图,图中:Gc(z)为电流环控制器;G2(z)为重复控制器。为了提高系统响应速度常数和比例环节G1(z)复合使用;R(z)为电流参考信号;E(z)为偏差信号;Y(z)为电流环输出信号;D(z)为扰动信号;P(z)为被控对象,GPWM(z)为变流器传递函数。重复控制器G2(z)具体结构如图3(b)所示,虚线框部分是内模环节。
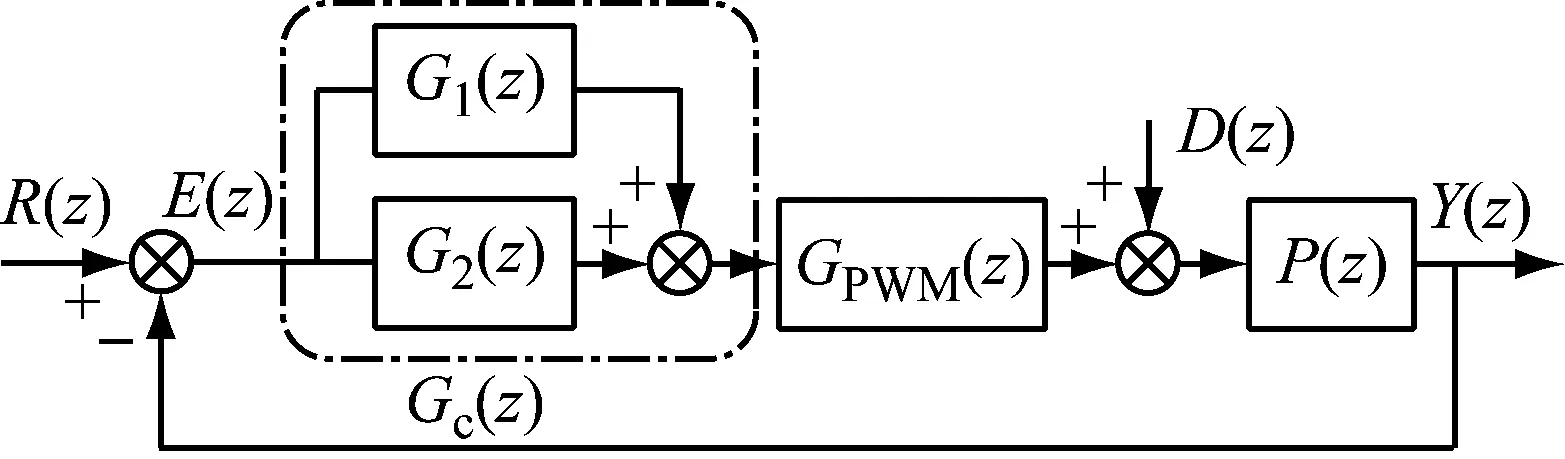
(a) 控制系统框图

(b) 重复控制器框图
图3 STATCOM电流环结构框图
2.1 自适应分数阶重复控制内模环节设计
在如图3(b)所示的传统重复控制器中,离散域相位滞后环节阶次N1、N2只能取整数,且N1=N2=fs/fm,为采样频率fs和网侧基波频率fm的比值。当电网工作在额定频率时,fs、fm呈整数倍关系,重复控制谐振频率和电网频率相同;当网侧频率波动时,fs、fm可能呈非整数倍关系,导致N1、N2与期望的分数阶相位滞后阶次产生误差。N1的误差会使控制器谐振频率偏离电网频率,导致系统补偿精度下降;N2的误差会导致相位超前补偿Zk阶次产生误差,所以N1、N2的偏差均会降低控制器的补偿性能。
采用一种基于拉格朗日插值多项式近似分数阶相位滞后环节的方法,将图3(b)传统重复控制中内模部分整数阶滞后环节N1、N2替换为分数阶滞后环节Z-Nq,改进后的内模结构如图4所示。

图4 改进的内模结构
对改进后内模环节的分数阶相位滞后Z-Nq采用n阶多项式逼近的方法,Z-Nq可近似表示为
(4)
式中:Nq是期望的分数阶相位滞后阶次;Np取最接近Nq-n/2的整数。
根据Oetken的理论[12-13],
(5)
理论上当多项式阶数n趋于无穷时可以无限逼近期望的分数阶滞后环节,实际中考虑计算量和精度,取n=3,D取Nq-Np,表示Nq的小数部分。
综合式(4)、(5),推导可得任意阶次分数阶相位滞后环节的3阶近似多项式通式:
(6)
采用自适应分数阶重复控制策略,在电网频率波动时,根据锁相环(PLL)计算的实时网侧电压基波频率fm与数字系统采样频率fs得到期望的相位滞后阶次Nq,结合式(6)得到分数阶滞后环节的近似多项式系数h(n)。通过数字系统在线调整图4所示内模环节的参数,保证相位滞后阶次等于fs/fm,从而使重复控制器谐振频率实时跟随电网频率的变化。
2.2 补偿器设计
kr为重复控制增益,一般取小于1的数,其大小和误差的收敛速度呈正相关,与控制系统的稳定裕度呈负相关。
补偿滤波器S(z)使系统在低频段保持零增益,并提高系统的高频衰减性能。从分析可知,电流环被控对象P(s)等效为一个惯性环节1/(Ls+R)。根据经典控制理论的期望函数校正法,设计补偿滤波器的复频域表达式:
(7)
超前环节Zk用来补偿被控对象P(z)和S(z)带来的相位滞后,使系统在低频段接近零相移。
2.3 稳定性分析
由图3、4可知,本文所提的电流环控制器传递函数Gc(z)可以表示为:
(8)
误差传递函数E(z)可以表示为
(9)
E(z)的特征多项式
H1(z)=1+Gc(z)GPWM(z)P(z)
(10)
当系统频率足够高时,控制系统近似无延时,即GPWM(z)=1。将式(8)代入(10),可得:
H1(z)=
(11)
设
(12)
将式(8)、(12)代入式(11)中,可得:
(13)
令
根据式(13)~(15)可知,电流环控制器稳定需满足以下两个条件:①H3(z)的根分布在单位圆内;② 在满足条件(1)时,根据小增益定理[14-15],控制器稳定的充分条件为在奈奎斯特频率范围内H2(z)的模值小于1。考虑到参考信号为周期性信号,且典型环节|Z-n|=1,对H2(z)化简可得式(16)所示的H4(z),即控制器稳定的充分条件为|H4(z)|<1。
H4(z)=Q(z)-krZkS(z)G3(z)
(16)
3 控制器参数设计与仿真分析
本文研究的三相STATCOM系统具体参数:相电压有效值us=25 V,交流电压额定频率f0=50 Hz,采样频率fs=10 kHz,交流侧电感L=3 mH,交流侧线路阻抗R=0.36 Ω,直流侧电容C=1 mF,直流侧电压给定udc=65 V。
3.1 控制系统参数设计
依据上文所述方法结合系统参数设计控制器。重复控制内模中Q(z)是低通滤波器,为了简化计算,一般取Q(z)=0.92;重复控制增益kr取0.1。以基波20次谐波为界,将S(z)的截止频率ω取2 000π,ξ取0.707,根据式(7)可得S(s),离散化后得:
(17)
S(z)对P(z)的补偿效果如图5所示。
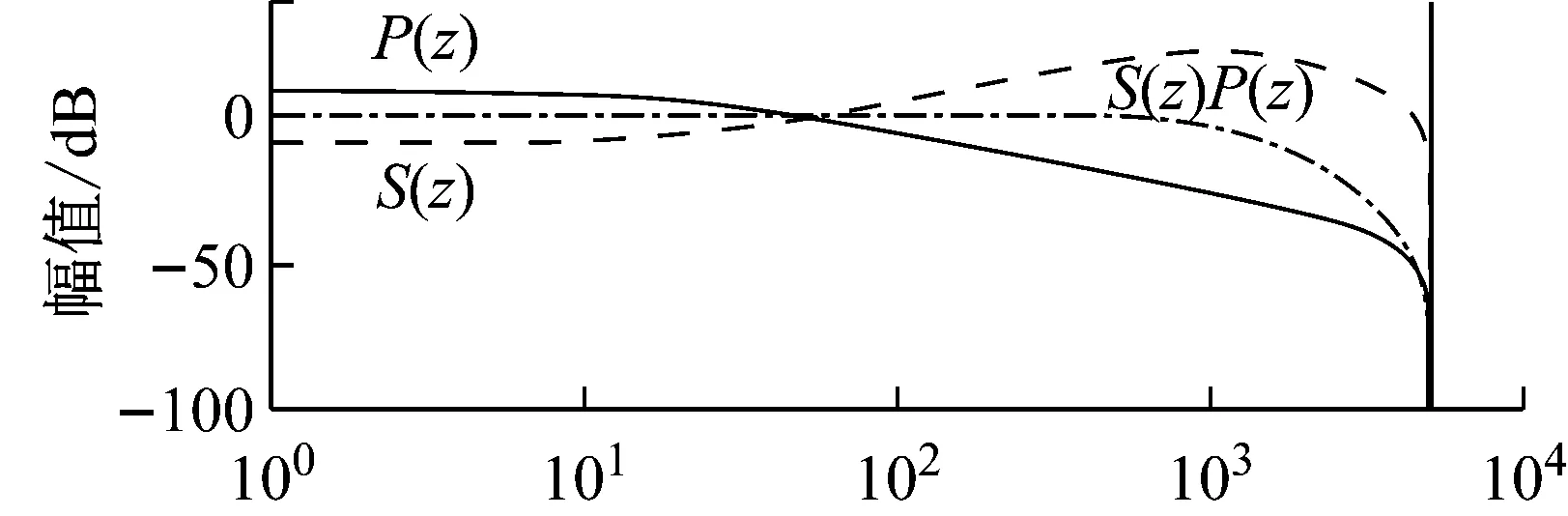

图5S(z)补偿效果图
根据图5设计超前环节Zk,补偿由被控对象P(z)和滤波器S(z)带来的相位滞后。超前环节对S(z)P(z)的补偿如图6所示。可以看到,当k=2时,超前环节近似地补偿了系统的相位滞后。仿真中,考虑到数字系统一拍的滞后,实际取k=3。
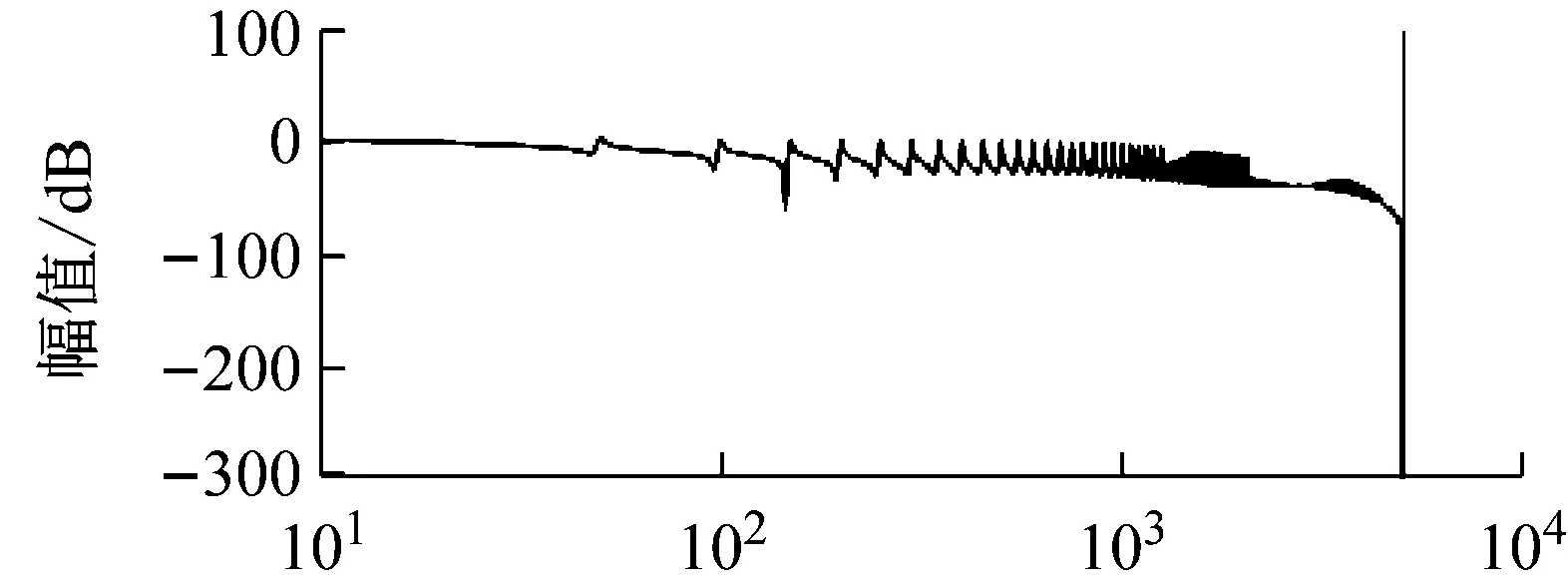
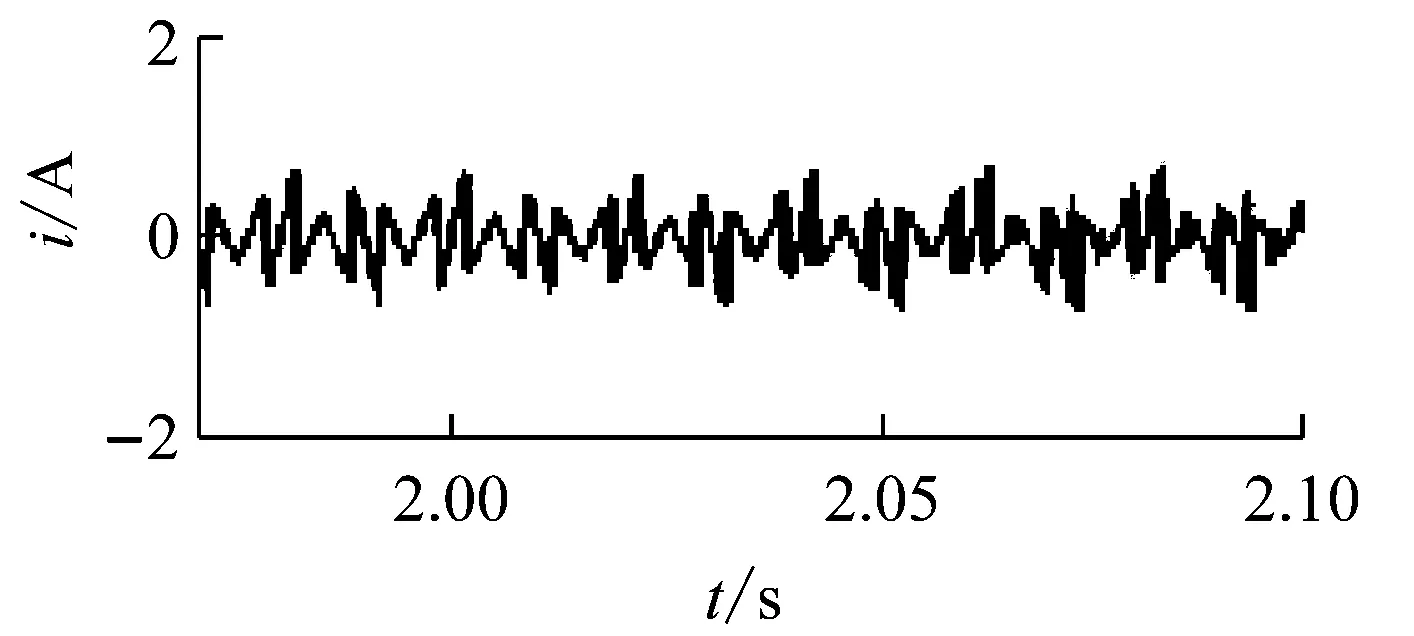
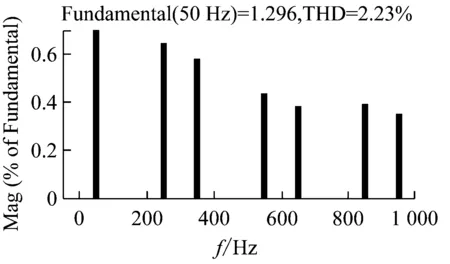
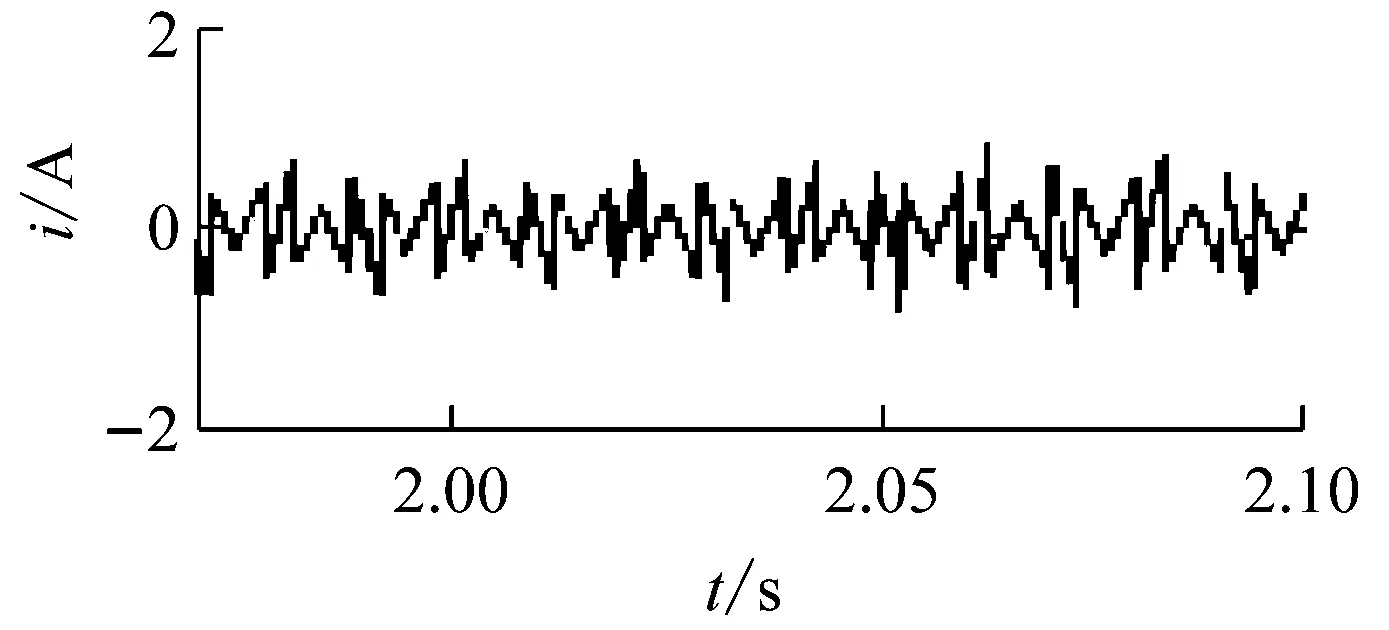
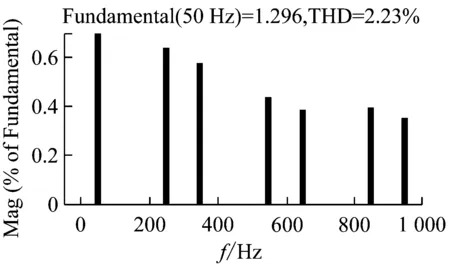
在控制系统稳定的前提下,kp的取值根据上文所述的稳定性判据①。绘制H3(z)随kp变化的参数根轨迹如图7所示,可以看到,当0 图6Zk超前补偿效果图 图7H3(z)随kp变化的根轨迹 根据稳定性判据②,绘制H4(z)的离散域奈奎斯特曲线如图8所示。可以看到H4(z)模值位于单位圆内,满足稳定性判据②。 图8H4(z)的Nyquist图 绘制电流环开环波特图如图9所示。可以看到,系统在基波频率及其整数倍频率处均有较大的增益,且低频段接近零增益、零相移。 图9 电流环波特图 根据上文的参数设计,在Simulink环境中搭建仿真模型,负载采用三相不可控整流器接50 Ω电阻作为非线性负载。为了验证系统在电网频率波动时的适应性,仿真设置在2.0 s时电网频率从50 Hz跃变到49 Hz,对比传统重复控制器和所提自适应分数阶重复控制器在频率波动时的适应能力。 图10所示为传统重复控制下系统的仿真波形。可以看到,在电网额定频率50 Hz时,传统重复控制可以保证好的补偿效果,网侧电流THD为2.23%;在频率变化后,由于谐振频率偏移额定电网频率,控制器补偿精度下降,电流THD增大到20.37%,超过了国标要求的范围。 图11是在相同条件下采用自适应分数阶重复控制的仿真波形。当电网工作在额定频率时,补偿效果和传统重复控制相同,电流THD为2.23%;在频率变化时,系统经过调节后仍保证好的补偿效果,网侧电流THD为4.03%,在国标允许范围内,故所提控制策略较传统重复控制策略适应性更好。 (a) 负载电流 (b) 频率波动时电网电流 (c) 频率波动时补偿电流 (d) 频率波动前交流电流THD (e) 频率波动后交流电流THD 图10 传统重复控制仿真波形 (a) 频率波动时电网电流 (b) 频率波动时补偿电流 (c) 频率波动前交流电流THD (d) 频率波动后交流电流THD 为拓展STATCOM的补偿带宽,使系统在电网频率波动时仍具备好的补偿性能,本文采用一种自适应分数阶重复控制策略。使用基于拉格朗日插值多项式近似分数阶相位滞后的方法,根据电网实时频率,在线整定控制器参数,实现了系统对电网频率变化的适应性。在分析了系统原理和控制器设计方法的基础上,进行仿真。结果表明,由于自适应分数阶重复控制策略的引入,使得控制器谐振频率可以跟随电网频率变化,提高了STATCOM的抗电网频率波动能力,证明了控制策略的可行性。



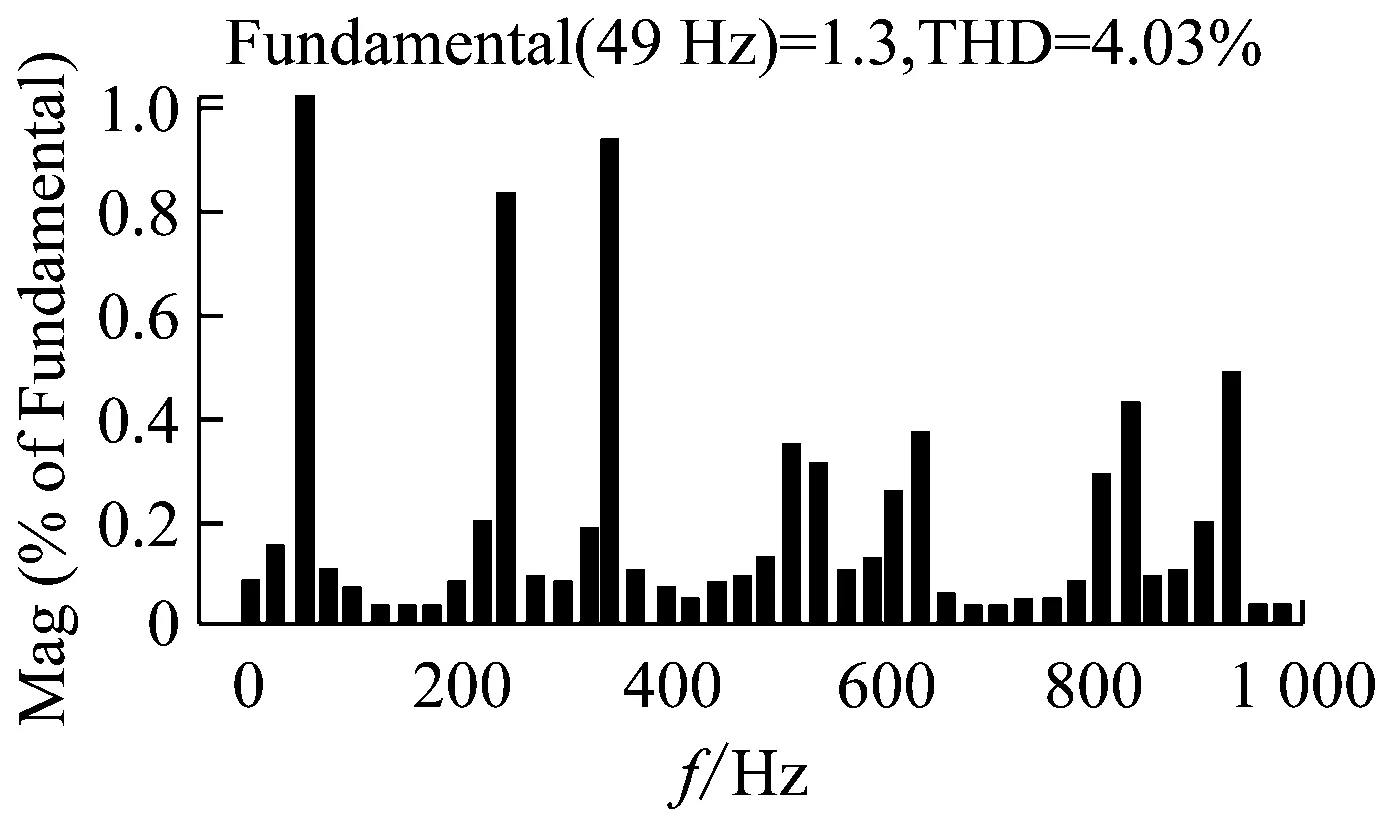
3.2 仿真分析




4 结 语