基于Delmia的工业机器人离线编程研究
2019-09-27马国庆于正林曹国华范师杰
马国庆,刘 丽,于正林,曹国华,范师杰
MA Guo-qing,LIU Li,YU Zheng-lin,CAO Guo-hua,FAN Shi-jie
(长春理工大学 机电学院,长春 130022)
0 引言
机器人离线编程技术自出现以来发展迅速。基本过程如下:首先,应用计算机技术在仿真空间建立机器人、工件和其他工作环境模型;其次,实现机器人在仿真空间运动仿真和作业编制,对仿真路径进行反复优化后生成机器人离线作业文件;最后,将生成的机器人代码通过特定通信接口上传到机器人控制柜,从而引导机器人进行实际操作[1]。
1 机器人离线编程工件标定
离线编程系统是在虚拟环境中采用仿真CAD模型对真实空间中的机器人进行模拟,为了对仿真单元中各部件模型和相对位置同真实空间中各单元进行一致性匹配,需要对仿真单元与真实空间中的工件位姿转换关系进行研究,从而解决离线编程系统实用化过程中的工件标定问题[2,3],工件标定原理如图1所示。其中,Osxyz为离线编程软件虚拟空间中的工件坐标系,Ob-xyz为机器人基坐标系,Or-xyz为真实工作空间中的工件坐标系。

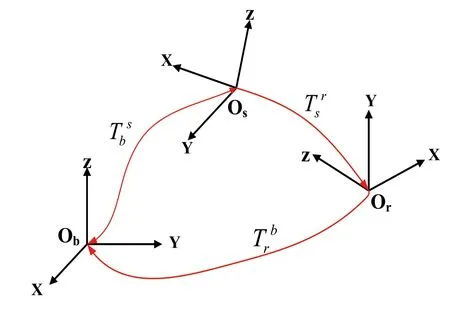
图1 工件标定原理图
常见工件标定方法有正交平面工件6点标定法,圆形基准工件4点标定法和辅助特征点3点标定法[4~6]。可用圆形基准工件4点标定法来对具有圆形定位基准的工件进行调整。可采用辅助特征点3点工件标定法对形状更一般的工件进行调整。对精度要求较高的可采用正交平面工件6点标定法。
1.1 正交平面工件6点标定法
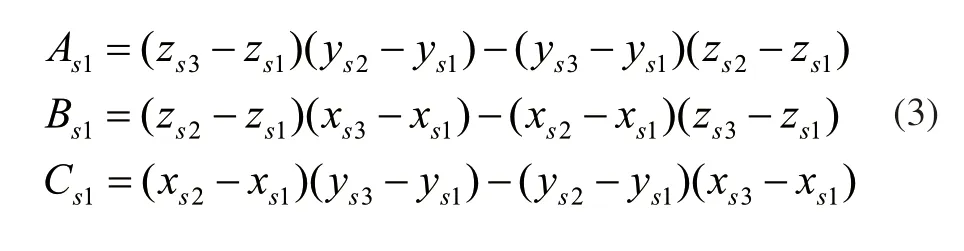
针对至少拥有2个正交平面的工件,可应用正交平面工件6点标定法来实现工件调整,如图2所示,其中Ob-XbYbZb为机器人基坐标系。定义真实工作空间中6点确定的工件坐标系为Or-XrYrZr,软件虚拟空间中工件坐标系为Os-XsYsZs。可通过正运动学得到仿真单元中6点的坐标信息,设6点分别为s1(xs1,ys1,zs1),s2(xs2,ys2,zs2),s3(xs3,ys3,zs3),s4(xs4,ys4,zs4),s5(xs5,ys5,zs5),s6(xs6,ys6,zs6),其中s1、s2和s3在第一个平面上选取,s4和s5在第二个平面上选取,s6在第三个平面上选取。第一个平面的方程表达式由s1、s2和s3确定:

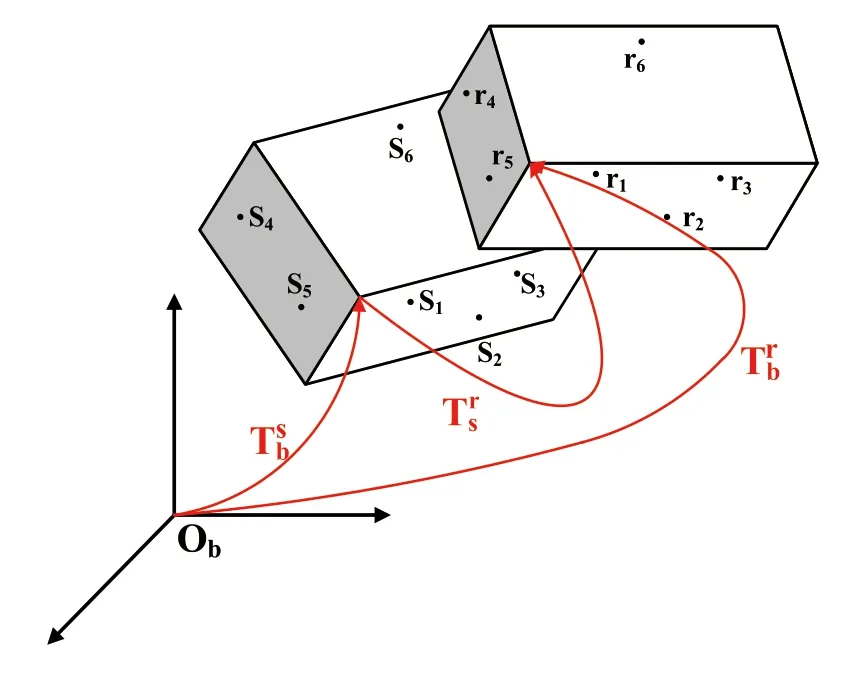
图2 正交平面六点标定
式(2)中:
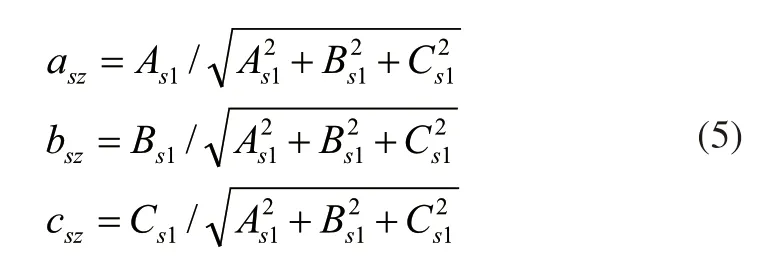
软件虚拟空间中工件坐标系的zs轴矢量由式(2)表示的平面确定,表示为:

式(4)中:
根据右手法则有:

式(6)中,p4s→5s为从s4到s5的单位矢量,也即{xs5-xs4,ys5-ys4,zs5-zs4}方向的单位矢量,由正交关系得:

根据三个平面上的三个点的坐标信息与三个正交平面的法矢量,得到三个平面的方程表达式为:
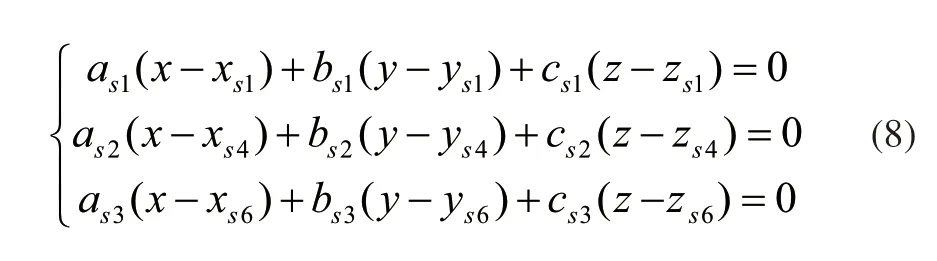
对联立方程求解,得到离线编程软件虚拟空间中工件坐标系原点Ox(xs,ys,zs),其中:
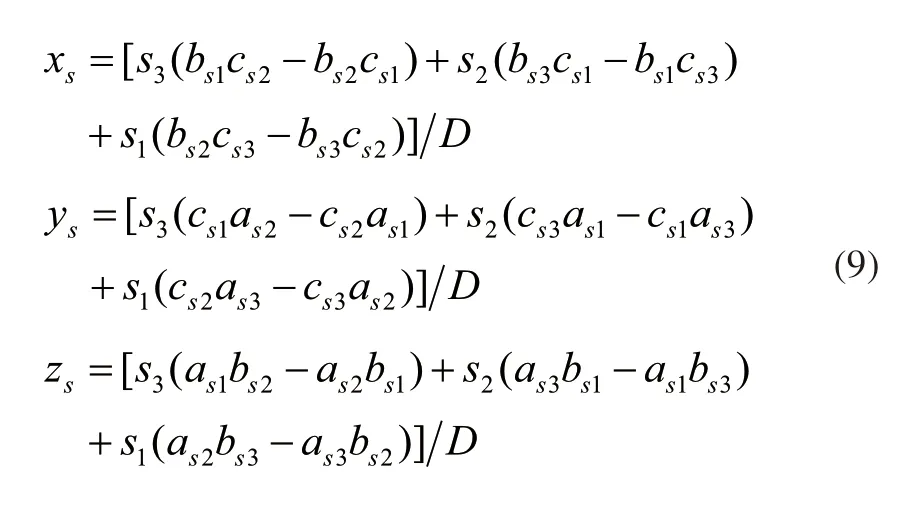
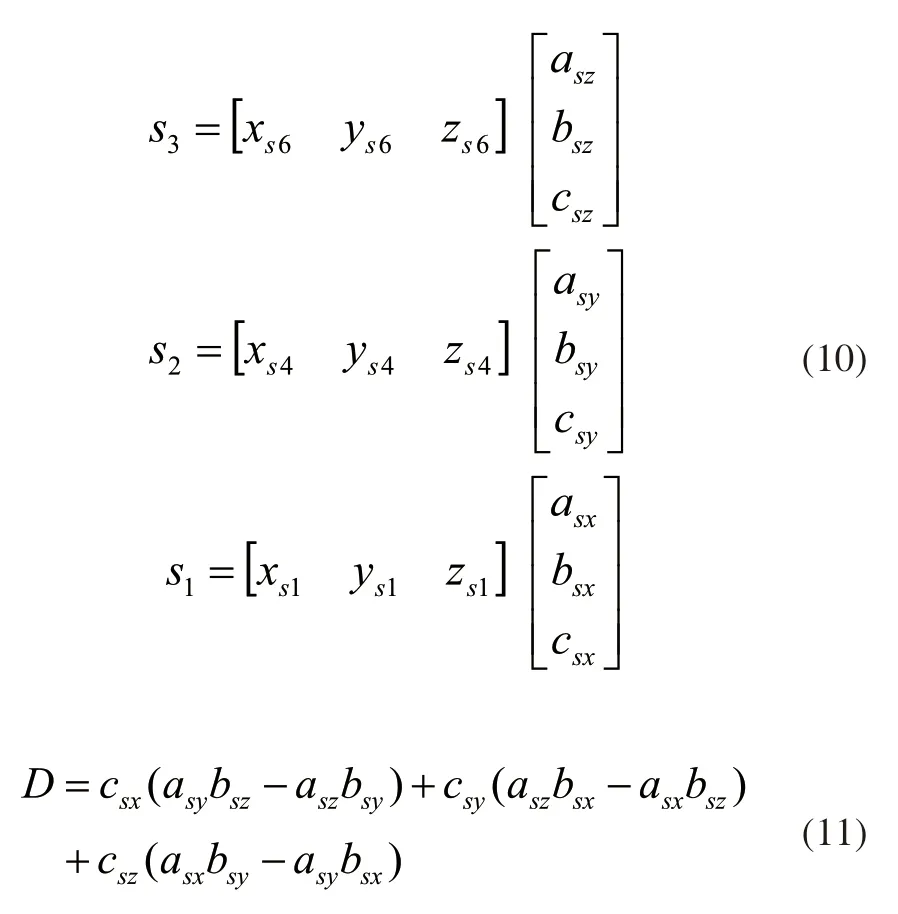
式(9)中:
从而得到机器人基坐标系到离线编程虚拟空间中工件坐标系的位置姿态转换矩阵,即:
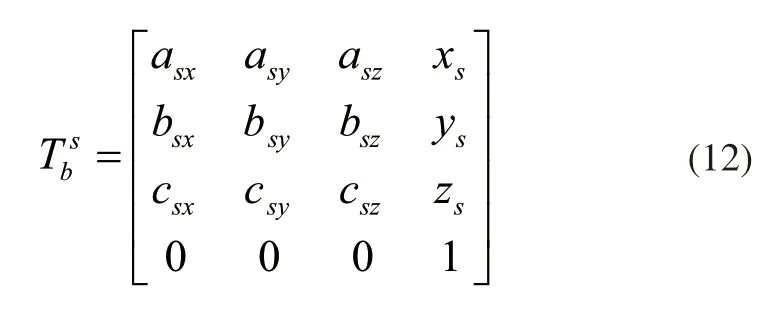
真实工作空间中示教得到的6点坐标可以通过测量手段或者机器人正运动学计算得到,根据上述方法,同样的可以得到真实工作空间中机器人基坐标系到工件坐标系的转换矩阵。根据式(1)所示,工件调整矩阵可由和计算得到。这种工件标定方法的优点是只要工件符合正交平面要求,对平面上实际点的位置没有特别的要求。
1.2 机器人离线编程工具位置标定
对工具坐标系进行标定时,首先确定一个空间参考点(x,y,z),通过示教器控制机器人运动使{TCP}原点同空间参考点位置重合,并记录下此时机器人各关节角度值,定义TC1(x1,y1,z1)为此时末端关节坐标系原点相对于基坐标系的空间位置;然后,通过示教编程获取另外四个位姿,确保每一个位姿下机器人的{TCP}原点与空间参考点位置严格保持重合,并对每个位姿下的机器人关节角度值进行记录,每个位姿相对于基坐标系的位置分别为TC2(x2,y2,z2)、TC3(x3,y3,z3)、TC4(x4,y4,z4)、TC5(x5,y5,z5),如图3所示。{TCP}原点在TC1,TC2,TC3,TC4,TC5五点确定的空间球的球心上,五点相对于基坐标系的空间位置可由机器人正运动学计算求得,然后再对球心坐标进行求解即可得到{TCP}原点在机器人基坐标系空间中的位置坐标。
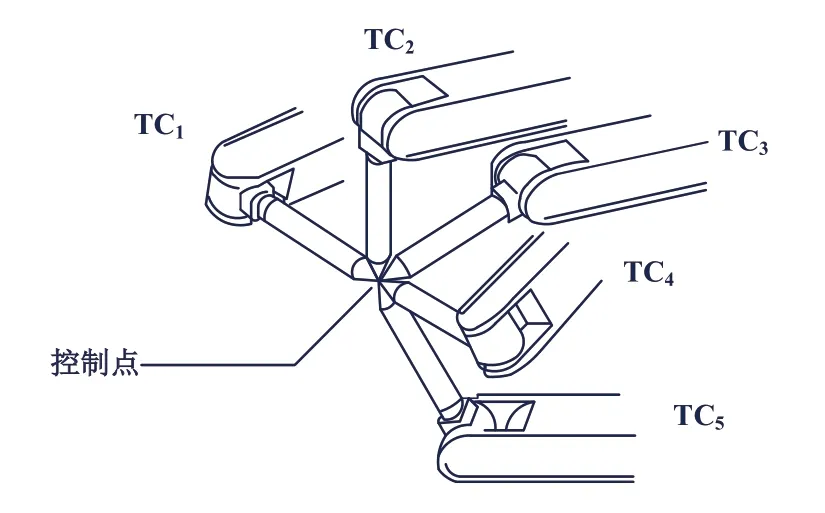
图3 TCP位置标定示意图
由不在同一圆上的4点便可确定出球心坐标与球的半径,为了得到可靠的观测值和高精度的测量结果,工具坐标系位置标定共测定空间球面上的5个观测点,其中4个用于求解球心坐标和半径,第5点用于平差计算。根据5个观测点计算出的球心半径为R,球心在基坐标系下的坐标近似值为(x0,y0,z0),球面上第i个测定点坐标为(xi,yi,zi),则:

然后代入TC1,TC2,TC3,TC4在机器人基坐标系中的相对位置,整理可得:
对式(14)求解可得球心坐标的近似值(x0,y0,z0)和空间球的半径的近似值R0。进而对这两个值求偏微分,并用修正值δx,δy,δz和δR代替微分,可得:

将根据球心的近似坐标和第i点的坐标观测值求出的球半径作为球半径的观测值,其修正值为VRi,则:

将式(15)代入式(16),则第i点的球半径观测值表达式为:

误差方程表达式为:

将五组观测值代入到式(17),可得误差方程:

式中V5×1={VR1,VR2,VR3,VR4,VR5}T,δ3×1={δx,δy,δz}T,l5×1={l1,l2,l3,l4,l5}T,
观测值TCi(xi,yi,zi)(i=1,2,3,4,5)为5个相互独立的正态随机误差,对角阵P5×5为相应对的权阵。观测量的最或然值依据平差准则应该满足VTPV=min。
利用拉格朗日法对V进行求解,构造函数:

为求Φ的极小值,令δ的偏导数等于零,即:

转置后得:

即:
对式(23)求解可得{δx,δy,δz},则球心在机器人基坐标系下坐标的最或然值为。其中:

根据机器人正运动学,可计算出机器人末端坐标系{e}相对于机器人基坐标系的位姿变换矩阵:

那么球心在机器人末端关节坐标系{e}中的坐标值{xe,ye,ze}通过坐标变换得到:

2 离线编程验证分析
实验所搭建的大型复杂曲面三维形貌柔性机器人测量系统主要由工业机器人、形貌传感器、机器人控制柜以及离线编程软件构成,形貌传感器与工业机器人末端法兰盘采用刚性连接件连接。
2.1 离线编程标定实验
在形貌测量离线编程前,先对工件位置进行标定,将一长杆件安装在机器人末端上。
2.1.1 TCP标定实验
将TCP设定在长杆件尖端,根据1.2节中的基于平差计算的五点TCP位置快速标定方法对TCP进行标定,保持待测工件不动,在机器人侧面放置一尖端工件,用示教器控制机器人带着长杆件以五个不同的位姿接触尖端,如图4所示。并用示教器记录下TC1到TC5的位姿信息,标定后的TCP位置信息如表1所示。
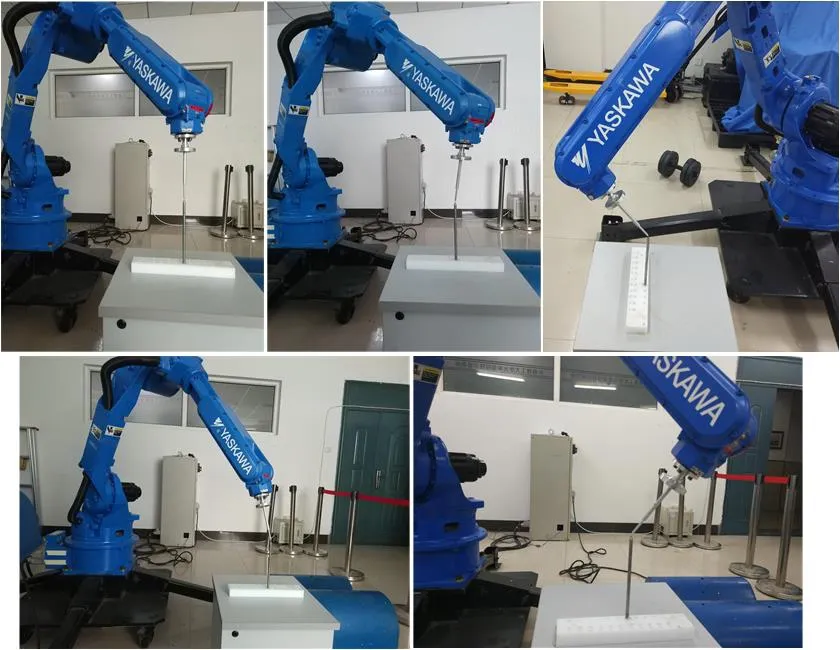
图4 TCP标定实验

表1 TCP理论值与标定值
2.1.2 工件标定实验
为解决离线编程虚拟空间与真实空间工件匹配问题,依据1.1节工件标定方法,结合本实验待测工件,拥有两个正交平面,故选择6点标定法。得出相对于机器人基坐标系的六个特征点理论坐标值。用跟踪仪测量6个特征点真实位置信息,并统一到机器人基坐标系下,坐标值如表2所示。
为了验证工件标定后的准确性,在仿真空间将杆件垂直插入4个定位孔,如图5所示。

图5 工件定位离线仿真
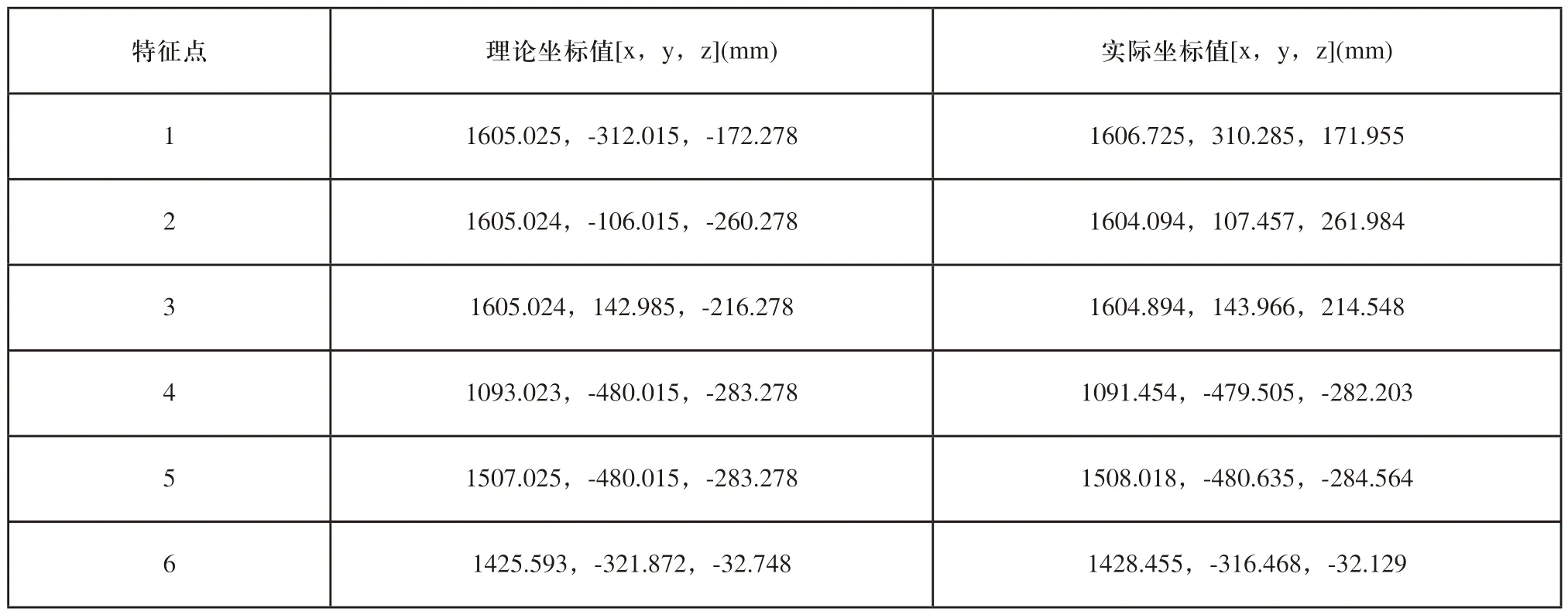
表2 六点标定法特征点理论值与真实值
将标定后的机器人程序导入示教器,运行机器人程序进行验证,长杆件可以准确地垂直插入,证明工件标定精准,如图6所示。

图6 工件标定验证
3 结束语
本文主要基于Delmia进行工业机器人离线编程技术研究,从工件标定与工具标定两方面对离线编程的标定进行了研究,解决了仿真环境与真实环境中工件位置匹配的问题;研究分析了一种基于平差计算的快速标定TCP的方法,可以节省大量工具坐标系校零时间,提高工作效率。最后借助Delmia离线编程将长杆件插入定位孔,其结果验证了工件标定的准确性。
