基于模糊决策补偿控制器的定子磁链估算系统
2019-09-27钟大志高丽娟刘鸣涛罗荣福
钟大志 高丽娟 刘鸣涛 罗荣福
(1.湖州越球电机有限公司 湖州 313009;2.浙江玛拓驱动设备有限公司 湖州 313009;3.嘉兴威凯检测技术有限公司 嘉兴 314000)
引言
在现实的异步感应电动机控制中,常采用的是异步电机矢量控制和异步电机直接转矩控制方式,基于纯电压积分磁链观测器模型的方案,由于不需要获取电机的反馈信号、控制逻辑较为简单、算法与实际制作容易实现等优点,在应用中较为普遍,但是纯电压积分磁链观测器模型具有其自身的不足之处:一是纯电压积分磁链观测器常常因为电路检测产生直流漂移而导致积分器饱和,出现误差。二是积分器的初始时刻存在偏置。针对于纯电压积分磁链观测器的不足,国内外一些学者也提出了一些观测器改进方案。如何志明等在“定子磁链观测器低通滤波器的改进”文章中提出了基于补偿加低通滤波器的方案,该方案确实能够提升观测器的速度和提高观测器的精度,但无法解决检测电路出现的直流偏移及积分器初始时刻存在直流偏置的问题。张星等学者在文章“一种能消除直流偏置和稳态误差的电压型磁链观测器”中提出了一种带通滤波器方案串联磁链补偿器网络的方法,该模型确实能够很好的解决电压积分器的直流偏置问题,但其速度响应的时间较慢,尤其是在电机运行在高速时,极易产生振荡,且磁链估测器中存在高频噪音分量。本论文为了解决纯电压积分磁链观测器常常因为电路检测产生直流漂移和积分器的初始时刻存在直流偏置问题,并兼顾提升磁链观测器的速度响应,提出了一种基于模糊控制理论的决策方案,具有对高通滤波器补偿系数kH和低通滤波器补偿系数kL参数的模糊决策处理能力,把异步电机的历史值和动态信号误差带到决策方案中,具有前馈补偿的超前预测能力,提高了定子磁链观测器的精度,提升其动态响应能力。
1 基于模糊决策补偿控制器的定子磁链估算系统分析
本论文是通过模块化的设计方案,通过电压积分磁链观测器和模糊控制器理论等技术,提出一种基于带通滤波器系数模糊处理控制器的电压模型定子磁链估算系统及方法。其观测器包含定子绕组反感应电动势采集模块、FDL和FDH模糊决策补偿器模块、模糊补偿模块和模糊带通滤波器模块。
1.1 定子绕组反感应电动势采集模块
通过采集异步感应电动机静止坐标α、β下的定子电压usα、usβ和定子电流isα、isβ,采集异步感应电动机的定子频率ωe,得到异步感应电机的定子反感应电动势esα、esβ。其定子反感应电动势依据公式(1)计算获得,其中rs为电机的定子绕组相电阻。

1.2 FDL和FDH模糊决策补偿器模块
FDL和FDH模糊决策补偿器模块是通过模糊决策补偿器分别对高通滤波器补偿系数kH和低通滤波器补偿系数kL进行模糊化决策处理,得到模糊高通滤波器补偿系数FDH和模糊低通滤波器补偿系数FDL。
滤波器补偿系数的动态误差定义,跟踪其误差ekH、ekL和变化eckH、eckL分别定义为:

定义yFDH的模糊输出器yFDH=f(ekH,eckH)和yFDL=f(ekL,eckL),然后将yFDH和yFDL进行量化处理,通过量化因子Ke和Kec来提高误差及变化的灵敏度。然后映射到模糊集合论域中,通常下,n的取值越大,系统的控制精度和效果就越高,但n太大导致模糊控制规则的确定难度增大,在异步感应电机的定子磁链估算中,采用7因子论域可以满足精度要求,然后建立其成员函数,定义模糊论域为负大(FD),负中(FZ),负小(FX),零位(LW),正小(ZX),正中(ZZ),正大(ZD),其模糊决策补偿器的成员函数表为图1。
得到模糊决策补偿器的成员函数后,建立模糊决策表如图2,通过IF-THEN决策选择规则作出决策,得到相对应的误差ekH、ekL和变化eckH、eckL的映射值FDH和FDL。
1.3 模糊补偿模块
模糊补偿模块是把异步感应电动机的反感应电动势esα、esβ,与定子频率ωe,通过具有符号函数sgn()的补偿模块输出得到ysα和ysβ输出量。
1.4 模糊带通滤波器模块
模糊带通滤波器模块是把输出量ysα和ysβ通过模糊带通滤波器模块处理后,得到异步感应电动机的模糊定子磁链估算值ψFDsα和ψFDsβ。
2 模糊决策补偿定子磁链估算系统设计方法
本论文的定子磁链估算系统是基于模糊控制理论与决策论方法,结合带通滤波器的优化方法,设计出具有模糊决策高通滤波系数及低通滤波系数的补偿系统。具体的实现方法是通过获取α及β轴电压分量、电流分量、补偿输出和磁链估算带通滤波来实现。
2.1 α及β轴电压分量采集与计算
通过信号采集元件实时采集异步感应电动机的线电压uab、ubc,然后换算到静止坐标下获得α、β轴电压分量:

2.2 α及β轴电流分量采集与计算
通过信号采集元件实时采集三相定子电流usa、usb和usc,把他们换算到静止坐标下获得α、β轴电流分量:

通过本论文公式(1)计算得出电机的反感应电动势在α、β静止坐标下的分量值esα、esβ。
2.3 α及β轴模糊补偿量输出
具有模糊补偿模块的输出量ysα和ysβ为:

式中sgn()为符号函数,FDH和FDL分别为高通滤波器补偿系数kH和低通滤波器补偿系数kL进行模糊化决策处理后的模糊滤波器补偿系数。
2.4 α及β轴模糊定子磁链估算
本论文的异步感应电动机定子磁链估算的带通滤波器表达式为:
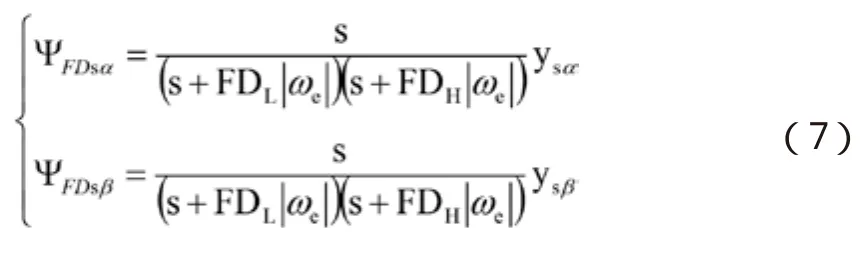
式中s为拉普拉斯算子,ψFDsα和ψFDsβ分别为α轴和β轴估算的具有模糊决策补偿系数的定子磁链。
2.5 模糊定子磁链估算系统的结构图
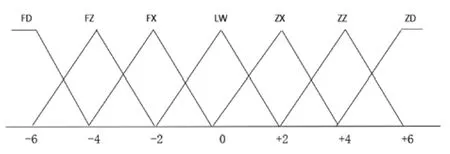
图1 模糊决策补偿器的成员函数

图2 模糊决策补偿器决策表

图3 具有模糊决策补偿的定子磁链估算系统结构框图
本论文是一种基于带通滤波器系数模糊处理控制器的电压模型定子磁链估算系统和方法,通过模糊决策补偿器分别对高通滤波器补偿系数kH和低通滤波器补偿系数kL进行模糊化决策处理,得到模糊高通滤波器补偿系数FDH和模糊低通滤波器补偿系数FDL。把异步感应电动机的反感应电动势esα、esβ,与定子频率eω,通过具有符号函数sgn()的补偿模块输出得到ysα和ysβ输出量,然后把模糊高通滤波器补偿系数FDH和模糊低通滤波器补偿系数FDL通过带通滤波器进行处理,获得具有模糊控制补偿的定子磁链估算值,其系统的结构框图如图3所示。
3 结论
本论文涉及的模糊决策补偿定子磁链估算系统与传统的带通滤波器定子磁链估算方法相比,具有对高通滤波器补偿系数kH和低通滤波器补偿系数kL参数的模糊决策处理,把异步电机的历史值和动态信号误差带到决策方案中,具有前馈补偿的超前预测能力,通过实际的控制系统验证得出该估算系统提高了定子磁链观测器的精度,也具有很好的动态响应能力,在实际的电机控制策略中具有很好的应用价值。
