基于CRUISE的纯电动轻卡续驶里程优化仿真分析
2019-09-26袁凯邹凡党宪斌陈国栋史强
袁凯,邹凡,党宪斌,陈国栋,史强
基于CRUISE的纯电动轻卡续驶里程优化仿真分析
袁凯,邹凡,党宪斌,陈国栋,史强
(陕西汽车集团技术中心,陕西 西安 710021)
以某纯电动轻卡为研究对象,在保持动力传动系统方案不变的前提下,优化整车控制,提出续始里程优化方案。基于CRUISE-MATLAB联合仿真平台搭建整车模型,对各优化方案进行仿真分析。结果表明:在不过度影响车辆驾驶感受的前提下,通过电机制动扭矩优化、及电机功率衰减可以有效的延长车辆的续驶里程,其中电机制动扭矩优化效果较为显著。综合优化方案可以提升28km续驶里程,提高了产品的市场竞争力。
纯电动轻卡;续驶里程;CRUISE仿真分析
1 前言
新能源汽车作为《中国制造2025》强国发展战略的组成部分,是汽车制造业最为重要的发展方向之一,各车企争相着手开发高水平的新能源汽车,提高产品的市场竞争力。在产品研发初期,通过计算机仿真建模计算能够快速得到新能源车辆的性能参数,为车辆的优化提供准确的方向[1-2],缩短产品正向研发周期,减少不必要的车辆试制及试验工作,成为保证车辆性能最为重要的途径之一。
本文针对一款纯电动轻卡,在保持动力传动系统方案不变的前提下,优化整车控制,提出两种续始里程优化方案。基于CRUISE-MATLAB联合仿真平台搭建整车模型,对各优化方案进行仿真分析,验证各方案对车辆续驶里程的优化效果,明确优化方向。
2 车辆基本参数
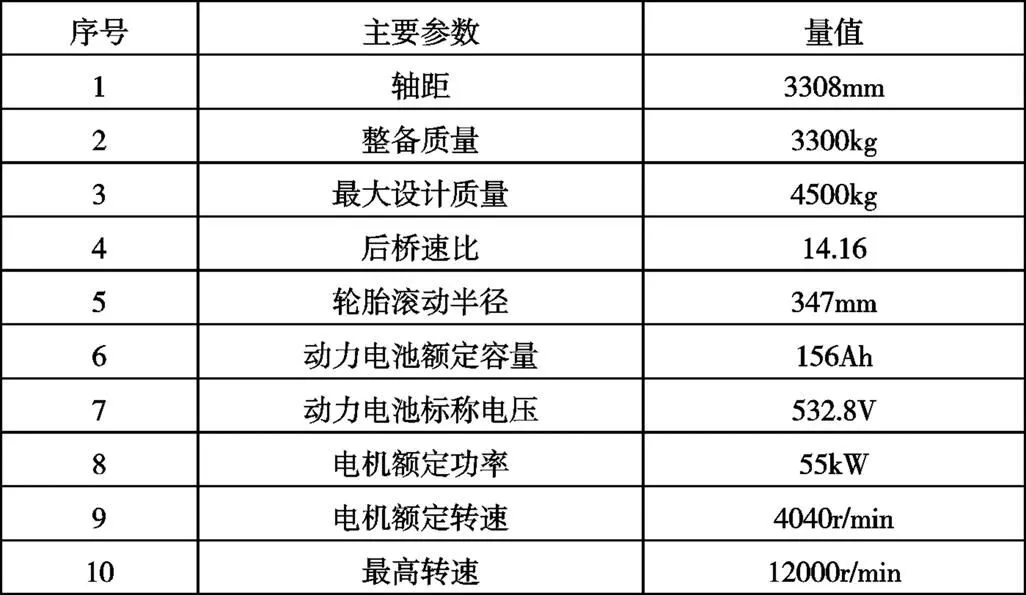
研究对象纯电动轻卡的整车基本参数如表1所示。
表1 纯电动轻卡基本参数
3 仿真工况
考虑到NEDC循环和C-WTVC循环都无法有效的作为纯电动轻卡的典型工作循环进行续驶里程仿真计算[3-4];同时为得到贴近用户、符合市场要求的实际车辆续驶里程,通过道路试验采集车辆在典型道路环境下路谱数据,得到纯电动轻卡综合工况,见图1。
表2 纯电动轻卡综合工况数据统计特征

4 优化方案
4.1 电机制动扭矩优化
仿真车辆采取并联式制动能量回收系统,在不改变原车制动系统和液压制动力的基础上,叠加一部分电制动力矩,原有制动系统和电机共同作用完成制动过程,实现制动能量回收。

图2 制动能量回收电机扭矩优化
通过提升电机制动扭矩可以使车辆在制动过程中回收更多的能量,改善制动能量回收效率,提升车辆续驶里程。但是受到制动安全法规及驾驶舒适性的限制,只能在一定范围内进行优化提升。
4.2 电机功率衰减
考虑到产品用户的实际需求,在一定程度上限制电机动力输出,虽然会降低车辆动力性能,但可以达到提升续驶里程的目的。分析纯电动轻卡综合工况道路试验采集数据,城市工况和高速工况下大部分时间电机输出功率低于50kw,其中城市工况电机输出功率低于50kW的工作时间占比为92%(见图3),高速工况电机输出功率低于50kW的工作时间占比为75%(见图4)。
图3 城市工况电机工作时间分布

图4 高速工况电机工作时间分布
由上述分析可知,在保证低速段车辆爬坡性能和加速性能前提下,对电机性能进行限制,输出功率不得高于50kw,可以实现在不过度影响车辆正常驾驶感受的前提下,避免电机大功率输出的情况,在一定程度上改善车辆的续驶里程,因此第二种优化方案为电机功率衰减。
5 整车建模分析
5.1 模型搭建
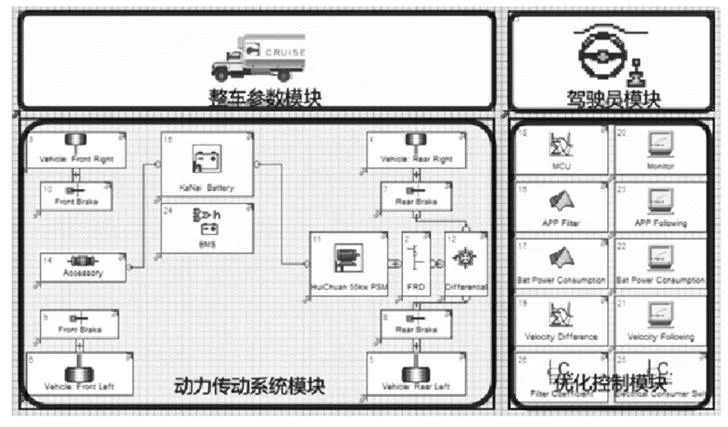
图5 纯电动轻卡CRUISE模型
基于CRUISE整车建模分析软件,纯电动轻卡整车模型由整车参数模块、驾驶员模块、动力传动系统模块及优化控制模块组成,如图5所示。其中优化控制策略由MATLAB/ Simulink/Stateflow软件进行编写,采用MATLAB DLL联合仿真方式完成模型搭建,实现优化控制策略对动力传动系统的控制。制动能量回收电机扭矩优化方案和电机功率衰减优化方案通过VCU控制模块予以实现。
5.2 优化方案可行性
通过仿真分析对比车辆在优化前、后的车速跟随情况,如图6,发现优化方案在车辆加速度较大的工况下会导致车辆加速性能变差,这是电机功率衰减所带来的影响,但在剩余超过95%的工作时间内,优化后的车辆模型车速可以实现很好的跟随,在动力性能方面满足了不过度影响车辆驾驶感受的要求,因此该优化方案具有一定的可行性。
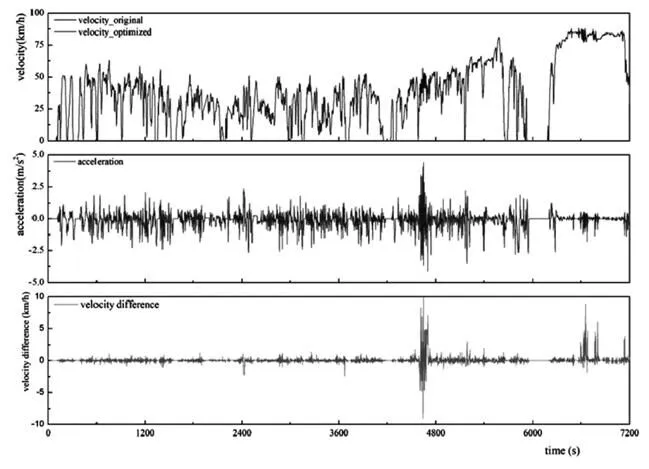
图6 优化控制车速跟随情况
5.3 优化效果
为评价各个方案的优化效果,提出灵敏度指标,以表征优化方案对车辆续驶里程的优化效果,灵敏度越大,表示该方案优化效果越好,可以更准确的为整车控制优化方案提供方向。灵敏度的定义如下:

式中,β是某项影响因子的灵敏度,%;Iop是参数优化后性能的值;Ior是原始性能的值。
基于CRUISE整车模型分别计算原始方案、单独电机制动扭矩优化方案、单独电机功率衰减方案及综合优化方案的纯电动轻卡综合工况续驶里程,得到各方案的续驶里程优化灵敏度,见表3。
表3 优化方案仿真结果

由仿真分析结果可知,电机制动扭矩优化较电机功率衰减优化方案灵敏度更高,在优化过程中应予以优先考虑。将两种方案结合起来综合优化方案的灵敏度最高,优化效果最好,可提升纯电动轻卡28km续驶里程。
6 结语
(1)CRUISE软件是一款成熟的整车性能仿真软件,以模块化的建模理念快速搭建不同动力传动系统的新能源车辆,并且具备与MATLAB相对应的接口模块,可以将基于MATLAB/Simulink搭建的整车控制策略集成于CRUISE搭建的车辆模型中,实现控制策略对车辆动力传动系统的准确控制,完成新能源车辆的仿真分析计算,为车辆动力匹配及性能优化提供有效的建议,缩短开发周期。
(2)本文以纯电动轻卡为研究对象,在动力性能方面不过度影响车辆驾驶感受的前提下,通过电机制动扭矩优化、电机功率衰减可以有效的延长车辆的续驶里程,其中电机制动扭矩优化效果最为显著。综合优化方案可以提升车辆28km续驶里程,提高了产品的市场竞争力。
[1] Chunhua Xu, JigaoNiu, Fennglai Pei. Design and simulation of the Power-train System for an Electric Vehicle[J]. AIMSEC, 2011: 3868-3871.
[2] 姜立标,吴斌,冯骁,等.电动汽车动力性参数的仿真设计与试验验证[J].汽车工程,2011(Vol.33) No.12:1013-1017.
[3] GBT 27840-2011《重型商用车辆燃料消耗量测量方法》[S].
[4] GB 18352.5-2013《轻型汽车污染物排放限值及测量方法(中国第五阶段)》[S].
Simulation & Analysis of Electric Truck Range Optimization Based on CRUISE
Yuan Kai, Zou Fan, Dang Xianbing, Chen Guodong, Shi Qiang
( Shaanxi Automobile Group Technology Center, Shaanxi Xi’an 710021 )
An electric truck was taken as the research object, optimization control programs were put forward to extend vehicle driving range, in the condition of maintaining current powertrain system. Each program was simulated and computed based on CRUISE-MATLAB co-simulation platform. The results indicate that electric machine braking torque optimization、accelerator pedal position signal optimization and electric machine power attenuation can effectively extend the driving range of the vehicle, and electric machine braking torque optimization is the most significant scheme. The comprehensive optimization scheme can increase 28km driving range, which improves vehicle competitiveness.
Electric Truck; Driving Range; CRUISE Simulation Analysis
U467
A
1671-7988(2019)18-35-03
U467
A
1671-7988(2019)18-35-03
袁凯,工学硕士,工程师,就职于陕西汽车集团技术中心,主要从事新能源汽车领域整车控制策略开发与应用研究。
10.16638/j.cnki.1671-7988.2019.18.012
