一种锥束口腔CT扫描装置的设计及仿真
2019-09-25张震宋卫东张丰收
张震,宋卫东,张丰收
河南科技大学 医学技术与工程学院(洛阳, 471000)
【关键字】 扫描装置; 虚拟样机设计; 静力学分析; 运动学仿真
0 引言
口腔锥束CT机的工作原理为由锥形束X射线投照、 X射线探测器检测、 计算机进行重建的影像设备。它相对于传统口腔CT来说,具有检查时间短、 放射剂量低、 成像质量清晰[1]以及操作简单等优点。在设计研发口腔CT机时,除了考虑探测器,高压发生器和低剂量这些关键核心部分以外,高精度的机械装置[3]直接关系到成像质量,所以在研发口腔CT机过程中高精度的机械结构同样也是必须解决的关键技术问题。因此本文从高精度机械结构方面出发,力求设计出一种低成本、 制造工艺简单、 可调高精度的口腔CT扫描装置。
1 口腔CT机的扫描方式
口腔CT机的扫描方式分为三种: 全景扫描,CT扫描和头颅正、 侧位扫描[4]。全景扫描主要特点为旋转臂的旋转中心需要按着牙齿的弓形游走,在此方式下应尽量保证X射线源、 牙齿以及探测器三者的距离恒定,以提高成像的质量。CT扫描模式下,旋转中心固定并且应与牙弓的中心相重合,然后绕头部旋转一周得到相关数据,探测器在对数据进行处理,最后利用重建算法,进行三维重建得到三维图形。头颅正、 侧位扫描方式与CT扫描方式原理基本相同,不同点就是在进行扫描时,头颅应靠近探测器一侧,远离X射线源,而且探测器与X射线源的距离应该在最大处。
2 锥束口腔CT机扫描装置机械结构设计需要解决的问题
目前口腔CT机主要分为单源单探,双源单探以及单源双探,单源双探采用一个X射线源和两个探测器,这就增高了相关成本,而且两个探测器是在预先指定的位置安装,可调性差。X射线源与探测器分别装在旋转臂的两侧,由于两者重量相差很大,所以在运行过程中会产生不平衡力矩使旋转臂的质心与旋转中心不一致导致成像出现偏差。再者,目前市场上大多数口腔CT及成品传动方式采用链条-链轮传动,此传动存在噪声大、 传动平稳性较差,在启停时存在冲击和振动等特点。针对以上机械结构方面所存在的问题,本文设计了一种新型锥束口腔CT的扫描装置。
3 口腔CT机旋转臂的总体设计方案
本设计采用单源单探模式,即在三种扫描方式下均采用一个X射线源和一个探测器。在全景扫描中,由于旋转中心需要沿着牙齿的弓形进行游走,所以需要一个二维运动产生装置。由于在三种扫描方式下,X射线源到被检测物体的距离不同,则X射线源应设计成可移动的。并且由于X射线源和探测器质量相差较大,在质量较轻的探测器一侧应加一个可自动调整的配重装置来平衡由于两者质量不同而产生的不平衡力矩。由于安装不可避免的误差,在X射线源和探测器处增加可调节结构,以便保证X射线源中心与探测器的中心相重合。最后为了使旋转臂运行平稳,传动系统均采用无链条式传动。图1为锥束口腔CT及扫描系统原理图。
3.1 口腔CT机旋转臂各执行机构运动参数设计
由于我国人员众多,各地区牙弓长和牙弓宽均有差异,查相关资料得出,我国人员牙弓长最大值为44.72±2.15 mm,牙弓宽最大值为59.68±3.45 mm。为了能满足各类人员,二维产生装置的运动范围为80 mm×80 mm。二维运动产生装置由于要求旋转中心沿着牙齿的弓形进行游走,所以必须给出精确的牙弓轨迹函数,随着口腔医学的发展,对牙弓曲线的拟合度要求也是越来越高,各种几何曲线和数学函数被应用于牙弓形态的描述,其中人们认为用贝塔函数[5]拟合牙弓的形态最为准确。因此本研究二维运动产生装置的控制软件应根据贝塔函数来编写。本次设计二维运动产生装置采用二维丝杠结构,精度可达±0.02 mm。为了使本设计能同时满足三种扫描方式,X射线源需为可调节的。旋转臂运动参数如图2所示。Dso min表示射线源到旋转中心的最短距离,Dso max表示射线源到旋转中心的最长距离,Dsd表示射线源到探测器的距离,Dsa表示探测器到旋转中心的距离。已知射线束的锥角为20°。探测器的有效面积为200 mm×250 mm。要求CT扫描模式下,最小视野直径可达到70 mm×70 mm。

图1 锥束口腔CT及扫描系统原理图Fig.1 Cone beam oral CT and scanning system schematic

图2 旋转臂运动参数Fig.2 Rotary arm motion parameter
则有Dso min=Dsa=35 mm/tan 10°≈198.49 mm。为了充分使用探测器的有效面积,则可得到Dso max=514.42 mm。
3.2 各执行机构的设计
3.2.1 工具机械
考虑到二维运动产生装置是在全景模式下运行,而全景模式要求,射线源和探测器之间的连线尽量保证与牙齿的弓形垂直,并且Dso和Dsa应保持恒定。考虑到成本、 精度以及结构刚性等相关问题,故采用滚珠丝杠传动结构。滚珠丝杠是由螺杆、 螺母以及滚珠[6]组成。并且是工具机和精密机械常用的传动原件,有着高精度、 可逆性和高效率的特点。本次设计二维运动装置如图3所示。在Y轴方向采用双滚珠丝杠双电机传动,电机均采用伺服电机,并采用编码器闭环控制来保证双电机的同步性。X轴方向采用单电机单滚珠丝杠传动,同时也采用编码器闭环控制。在Y向运动发生装置如图4 所示。设计中,由伺服电机1产生动力通过缓冲联轴器2与滚珠丝杠4连接带动丝杠螺母5运动。丝杠螺母5与滑台6刚性连接。使滑台6产生直线运动。在设计中加入两个导向轴7,来减少运动过程中产生的Y轴运动误差。考虑到二维运动装置下接一个旋转臂,旋转臂重量较大。以及传动过程中摩擦力的影响,Y轴运动产生装置支撑平台上设置滚珠8,滚珠的直径大小应小于滑台宽带的三分之一。一来可以减少滚珠丝杠承受的压力,二来把滑动摩擦变为滚动摩擦,来提高传动效率,进而提高定位精度。X向运动产生装置(图5)上,滑台底部设置四个滑轮4,滑轮沿着轨道3进行移动,
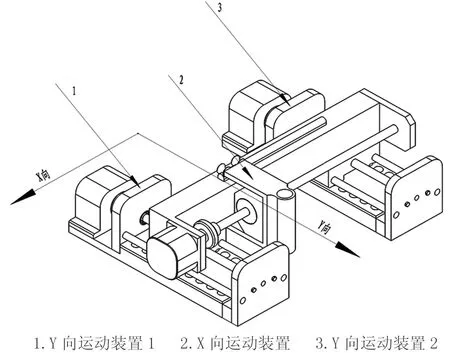
图3 二维运动传动装置机构图Fig.3 Two-dimensional motion transmission mechanism diagram
不但保证运动的直线度,同时也保证滑块5与底座不接触,有很高的承重能力以及超强的抗侧面扭力,在极限位置两端均加有限位开关。
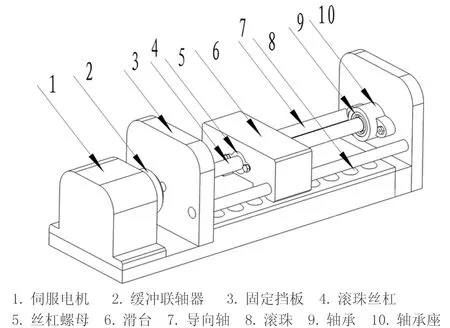
图4 Y向运动传动装置结构Fig.4 Y-direction motion transmission structure

图5 X向运动传动装置结构Fig.5 X-direction motion transmission structure
3.2.2 口腔CT机C形臂结构设计
C形臂是口腔CT机扫描装置的最核心部分,C形臂的两端分别装有X射线源和平板探测器,然后围着被扫描物体旋转180°或者360°即可成像。而C形臂在运动过程中的平稳性直接关系到成像的质量,设计时不仅应该保证运动的平稳性,而且应该保证C形臂的质心始终与旋转中心在一条直线上。由于X射线源与平板探测器质量不同,而且本次设计采用的是探测器端固定,X射线源端采用可移动式来完成三种不同的扫描方式。如果在结构上没有很好地消除静不平衡力,那么将会导致旋转轴的轴线在轴向偏移的基础上倾斜,导致旋转轴的轴线做圆锥运动,根据力学知识建立口腔CT机C形臂的数学模型,如图6所示。
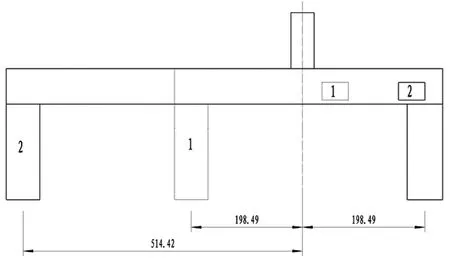
图6 C形臂模型图Fig.6 C-arm model
在各坐标上的投影可表示为:
i表示各个不同位置的物体。

由上分析如果使旋转轴达到动平衡,就必须使主力矢量和力矩矢量为零。由于X射线源、 配重块、 和探测器的质量是一个常数,则需要求出C射线源与配重块相对于旋转中心的位置关系函数。首先确定配重块的质量,X射线源在极限处对旋转轴产生的离心力最大,可得配重块质量为44.72 kg,此时滑块位于旋转臂支撑梁的最右端。当进行CT扫描时,X射线源移动至198.49 mm处,则可得出配重块应在距离旋转轴中心56 mm处。可得位置关系函数为RS=2.2RP+73.88,其中(198.49 mm≤RS≤514.42 mm,56 mm≤RP≤198.49 mm)。X射线源和配重块移动采用一个电机控制,传动比可由目标函数得出。图7为扫描装置C形臂结构简图。

图7 扫描装置C形臂结构简图Fig.7 Schematic diagram of the C-arm structure of the scanning device
3.2.3 可调节装置
由于在生产过程中以及安装过程中存在不可避免的误差,为了确保X射线源的中心始终与平板探测器的中心相对应,故在X射线源和探测处分别设置了可调节装置。该装置可手动可自动,并能进行粗调和精调。
设计了一个上下调节装置,如图8所示。当旋钮1连续单向旋转时,就是进行粗调整。当旋钮反向旋转时,在1/3圈的范围内旋钮自动进行精确调整,超过这个范围时,旋钮重新进行粗调整。蜗杆4安装在轴6上并且可以沿着轴6移动一小段距离。旋钮刚性的连接到轴6上。当6轴上的驱动销3与蜗杆上的档销2接触时,蜗杆4就发生转动,随后涡轮7和小齿轮8也发生转动,然后驱动齿条9升高或者降低,这就是粗调整。但是当旋钮反向转动时,将停止进给,并且由球和鞋面组成的机构会使蜗杆4沿着轴6有一个很小的移动。这就使得涡轮7和小齿轮8产生微小的转动,齿条也只是有限的移动。在档销2的限定范围内进行精密进给。

图8 X射线源与平板探测器可调节装置Fig.8 X-ray source and flat panel detector adjustable device
4 仿真结果分析
首先对设计的结构进行了静应力分析[10],由于三种模型下受力不同,此次只分析了全景扫描模式下综合受力最大的情况。分析步骤如下: (1)首先简化模型,删去一些对分析有干扰的部件; (2)定义实体和材料信息,为了减少总质量,横梁材料最终选择为201.0-T43型铝合金; (3)添加载荷和夹具,载荷为非均匀分布,夹具为固定旋转中心的旋转轴; (4)网格划分并运行结果。由图9静力学分析结果可以看出本设计满足机械强度要求。

图9 静力学分析示意图Fig.9 Static analysis diagram
为了验证设计结构的高精度性,本文对此次设计的结构进行了ADAMS运动学仿真[8],因为三种扫描方式下,只有全景扫描比较复杂,所以只仿真了全景扫描模式下质心与旋转中心的位置关系。仿真步骤: (1)把在solidworks中建好的三维模型保存成parasolid格式并导入到Adams中。(2)检查重力加速度并定义材料的相关属性[9]。(3)添加运动副和驱动,并修改驱动函数。因为本次模拟是全景扫描方式下的运动,二维运动函数设置为牙弓的目标函数。(4)添加载荷,把载荷按照实际受力情况加入到模型中。(5)得到了相关的运动轨迹图,如图10所示。其中实线代表旋转中心的运动轨迹,虚线代表质心的运动轨迹。从图中看出旋转中心的运动轨迹和质心的运动轨迹基本吻合,能保证本次结构设计扫描装置的平稳性。

图10 旋转中心与质心运动轨迹图Fig.10 Rotation center and centroid motion trajectory
5 结语
本研究根据目前锥束口腔CT机扫描方式,重新设计了一种单源单探的扫描装置,从而降低了目前口腔CT机的成本,并且保证扫描装置在运动过程中的高精度性,提高口腔CT机成像的质量。从仿真结果来看,本次设计完全符合目前口腔CT机扫描装置的医用要求,并适用于目前中小型口腔诊断设备。