永磁同步直流电动机的直接转矩系统设计
2019-09-23李博张靖典
李博,张靖典
(西安工业大学北方信息工程学院, 陕西西安,710032)
0 引言
1823 年出现了世界上第一台电动机,它的定子由永磁材料所制造,也就是永磁体,所以它的定子可以自身产生励磁磁场,这就是永磁同步电动机。我国是盛产稀土钴永磁和钕铁硼永磁的国家,永磁矿物材料的储备量非常高。因此,对于我国来说,永磁电动机的发展有很好的应用前景。
直接转矩调速系统直接摒弃了解耦的思想。简单明了的对电动机的磁链进行分析,对转矩进行控制,并且用定子的磁链的定向作为最基本的准则,避开了电机中不易确定与测量的参数。所以直接转矩调速系统的控制更加简单直接,计算过程也更加方便。
本论文主要是探究直接转矩控制系统对于永磁同步直流电动机来说,是否可以提升其效率;以及直接转矩控制对其的影响和利弊陈述,并且基于此对这一过程进行理论分析。
1 永磁同步直流电动机的数学模型
永磁同步直流电动运行起来比较复杂。以下将分别介绍磁链方程、电压方程、转矩方程和运动方程。因为这四个方程式构成永磁同步直流电动机的数学模型的基础。
1.1 磁链方程
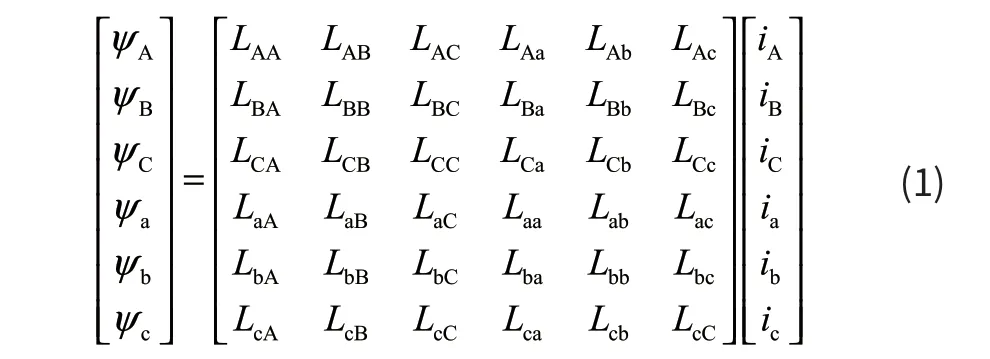
每个绕组的磁链自感磁链加上互感磁链就等于每个绕组的自身磁链,而互感磁链是其它的绕组对这个自身绕组所产生的。永磁同步直流电动机有六个绕组,所以就有六个磁链方程,这六个方程(1)如示。
或写成:

1.2 电压方程
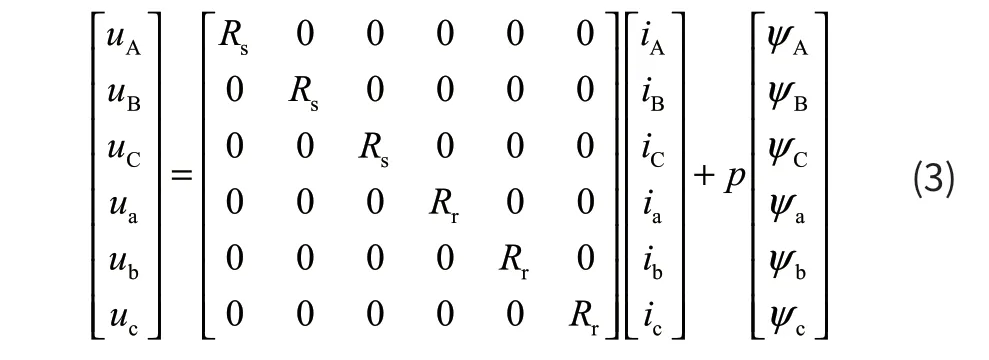
或写成:

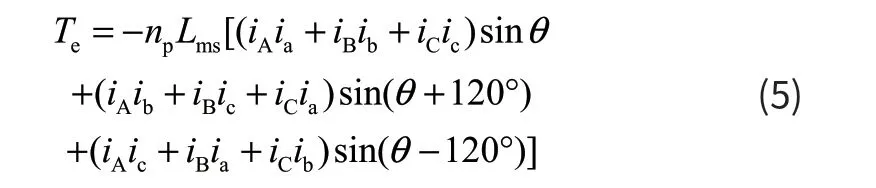
1.3 转矩方程
1.4 运动方程

其中 TL —负载阻转矩;J —机组的转动惯量。
转角方程为:

2 直接转矩控制系统
2.1 直接转矩控制系统的基本原理
图1 为永磁同步直流电动机的直接转矩调速系统的整个原理框图,此系统主要是通过控制电动机的磁链和转矩,以此达到控制整个电动机的目的。如图所示,*T 是由电磁转矩所产生的一个信号,而这个信号是由转速调节器(ASR)所输出而来的,而要想实现不被干扰的转矩控制,还需要其内环,因为它可以压制磁链的变化,使整个系统都实现解耦,所以只能把内环放在*T 后面。至于 sψ,它是转子磁链,而直接转矩控制系统就是要使它的幅值保持不变,然后改变定子磁链的运动速度,当其运动速度改变了,那么磁通角的大小也将改变,这就是直接转矩调速系统的控制方式。
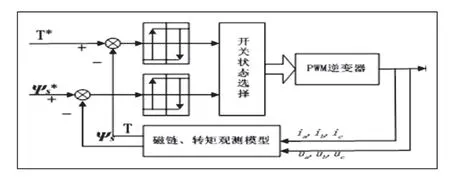
图1 直接转矩控制系统图
2.2 直接转矩控制系统的特点
直接转矩控制系统主要有四大特点:
(1)简单直接。
(2)几乎不受参数的影响。
(3)误差非常小。
(4)性能优良。
以上特点,使得直接转矩控制系统一经推出,就立马被大众所接受,并且迅速得到了广泛的使用和传播。
3 直接转矩控制系统的建模与仿真
3.1 建立直接转矩控制系统仿真模型
如图3 所示,此图为直接转矩控制系统的仿真模型,在此仿真模型中,使用的是PI 调节器,此调节器的转速是积分制的,其输出是限幅的。而永磁同步直流电动机将采用基于α-β 坐标系的数学模型,定子的磁链采用带有滞环的双位式控制器,转矩调节器也和定子磁链一样。simulink中的s 函数编写编写电压矢量。
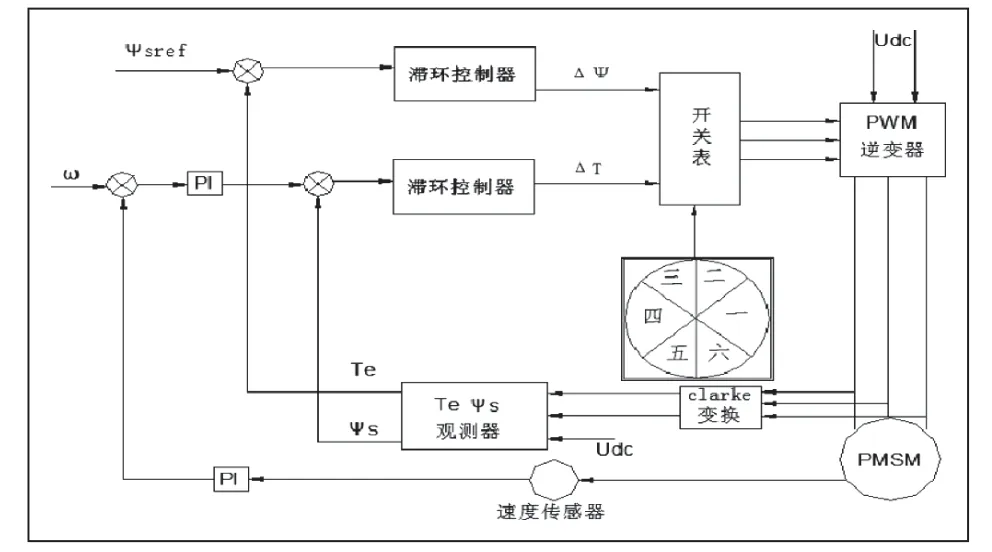
图2 永磁同步电动机直接转矩控制原理框图
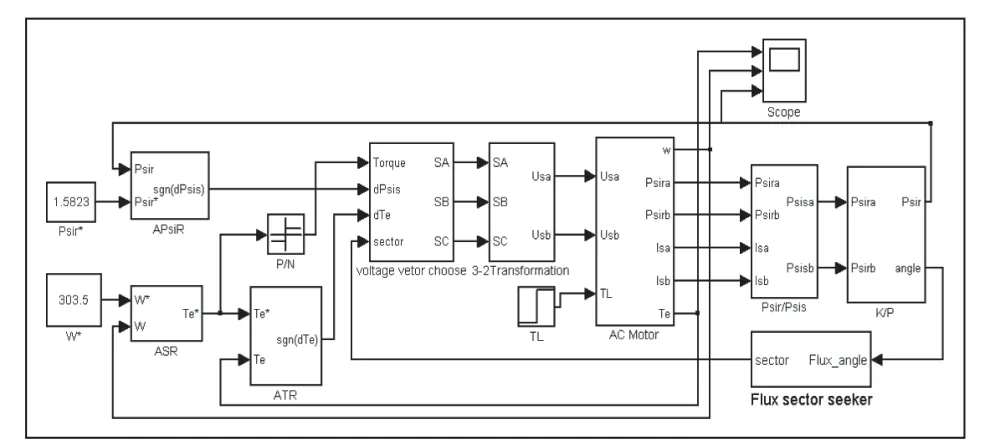
图3 直接转矩控制系统仿真模型
3.2 仿真的结果与分析
在仿真的时候,永磁同步直流电机的参数为:直轴电感Ld=0.00851H,定子电阻Rs=2.8751Ω,永磁材料制成的转子的磁链ψf=0.1751Wb,交轴的电感Lq=0.00851H;极对数p=4;转动的惯量J=0.000851Kg·m²,滞系数B=O,磁链给定为ψs=1.2Wb,逆变器直流电压U=380V,考虑电机的理想状态,电机摩擦系数为零。速度环PI 调节器参数为kp=0.31,ki=23,系统仿真时间设为0.51s,此参数是经过反复调试而得到的。
①当空载启动时
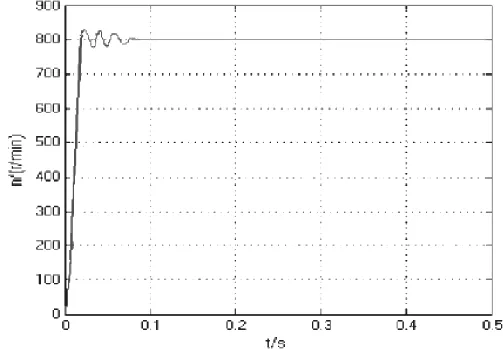
图4 (b) 转速响应曲线
②当带负载启动时
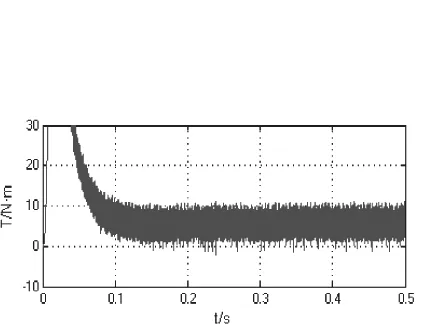
图4 (c) 转矩响应曲线
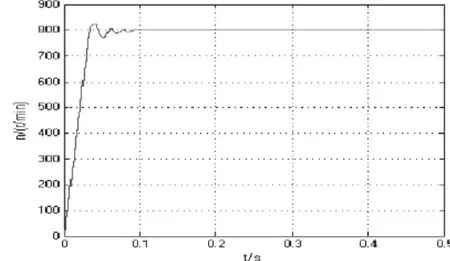
图4 (d) 转速响应曲线
③当系统稳定时

图4 (e) 转矩响应曲线
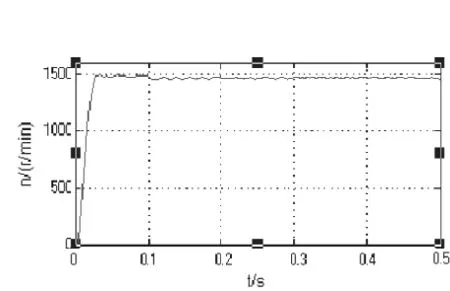
图4 (f) 转速响应曲线
由上图可知在转速突变时,转矩波动较大,但能在12ms 左右便进入稳定,恢复原值。但是在直接转矩控制系统附加在永磁同步直流电动机的过程中,定子和转子的磁链以及电动机转矩的脉动都将立马上升,仍有很大的改进空间,对于产生磁链和转矩脉动的主要原因分析如下:
(1)滞环控制器不能及时控制误差,因此,稳态精度仍有待提高。
(2)在电机低速运行时,由于温度的变化,定子电阻阻值也会随之变化,从而影响永磁同步直流电动机的参数,从而使其低速性能变差。
(3)电压空间矢量的选择是通过滞环控制器的输出来控制的,因此只可能比较两个滞环控制器的输出,这样一来,电压空间矢量就是突变的,并且使得磁链和转矩也就发生突变,磁链和转矩脉动也就不可避免了。
4 结论
整篇论文的主要内容到此已经基本介绍完毕,现在对以上研究做一个归纳和总结,通过对研究内容的总结,不但为今后的研究工作打下一定的基础,还可以通过总结看出研究内容的一些不足之处,使之成为日后改进此项研究可以进一步进行的工作。
(1)通过简要介绍各个坐标以及各个坐标相互转换的原理和具体算法,在不同坐标系下,我们也分析并建立了各个情况下的数学模型。
(2)分析了PMSM 下DTC 系统的基本原理,其根本思想就是直接对转矩进行控制,在改变转矩角的同时是定子的磁链的幅值为一定的常数,以此来直接控制同次同步直流电动机的转矩,从而减少了大量而复杂的计算。
(3)用Matlab 软件中的Simulink 作为仿真工具,永磁同步直流电动机的直接转矩控制系统进行了仿真,并且得到了其模型,而且在此基础上,对其结果也进行了研究与分析。分析仿真结果,定子磁链波形基本符合圆形定子磁链的要求,且转矩和转速响应也基本符合预先的设想。但由于直接转矩的自身缺陷,使得定子磁链脉动仍然较大,并通过对仿真结果分析,讨论了该方法存在的问题,指出传统直接转矩控制系统磁链、转矩脉动大的根本原因是一个周期内只能选择一个基本电压矢量,且转矩和磁链误差不能被所施加的电压完全补偿。
