基于LoRa 和EMD 的水声监测系统设计
2019-09-23姜愉黄美媛通讯作者王明娟梁剑烽邓宗莲
姜愉,黄美媛(通讯作者),王明娟,梁剑烽,邓宗莲
(北部湾大学电子与信息工程学院,广西钦州,535000)
0 引言
进行水下声波测量时,经常会检测到一些时间较短的瞬态信号,如水下生物发出的声音、发动机声音、船舶穿过声、鱼类划水声、水下爆炸声、物体入水声等。这些声音信号具有丰富的目标特征信息,对于捕鱼、生态保护、军事等方面具备重要参考价值。
由于采用声呐系统对瞬时信号进行特征提取的方法不够完善,因此瞬态信号的检测意义重大。但由于水声信号源往往处于水源深处,普通的通讯方式很难实现信号传输,因此选取一种适合在深水中远距离无线传输的方式尤为重要。水声换能器具备发生信号和接受信号的功能,适合水下信号采集及定位。在适当位置布置水声换能器可有效监测水下声音信号[1]。
LoRa 技术适合远距离扩频传输,穿透力强,本文采用LoRa 技术设计远程无线水声监测系统,并对采集的数据信息使用EMD 分解,提取数据中有用信息作为特征参数。
1 技术原理
1.1 LoRa 通信原理
根据信号传输特性公式,低频信号往往具备更远的传播距离并损耗较低。LoRa 通过433MHz 等较低频段进行通信,通信距离远大于2.4GHz 通信的ZigBee、BlUetooth 等通信方式,LoRa 在无障碍情况下的直线通信距离可达20KM以上。传统调制方式包括二进制相移键控、频移键控方式传输距离在2km 以内。
LoRa采用扩频通信技术,通过扩频码调制,传输距离远,同时具备极强的绕射能力。信息发送采用多频道传输方式,任一信道到达接收端即可实现通信,相对单一信道通信方式更适合在水中传播。
1.2 EMD 原理
EMD(经验模态分解)通过选取适当的通过对信号局部极大值和极小值点进行插值的方式形成包络线,然后计算包络平均值。通过函数剩余量减去包络平均值获取各个分量,直至剩余函数中极值点个数小于等于两个分解结束。
EMD(经验模态分解)分解原始信号为符合极点值与过零点值数量差别小于1 和局部最大值和局部最小值产生的上下包络线的平均值为0 的窄带分量。EMD(经验模态分解)分解的各个分量含有不同的频率特征和特征尺度,对各个分量通过选取适当的IMF(固有模态函数),可实现去噪重构。对各个频率分量采用希尔伯特变换可实现瞬时属性参数的获取,这也是著名的希尔伯特黄变换的实现方式。其核心公示:
其中 x (t )为原始信号, ci(t )为本证模函数, rn(t )为剩余分量。
2 硬件设计
水声监测采集系统分为上位机、LoRa 网关和水声采集节点三部分构成。水声采集节点包括水声传感器、单片机、存储器和GPS 模块及LoRa 无线传感模块构成;网关包括单片机、存储器、LoRa 无线传感模块及串口构成。水声采集节点通过水声换能器采集水声数据,数据经滤波放大后进入单片机,单片机通过LoRa 无线传感网络转发至LoRa 节点,节点通过LoRa 无线传感网络发送至LoRa 网关,LoRa网关收集多节点数据后通过RS485 总线发送给上位机,上位机对水声数据处理及发送采集命令[2]。如图1 硬件架构图所示,水声采集节点通过LoRa 无线传感网络与LoRa 网关通讯,LoRa 网关通过RS485 与上位机通讯。
设计中所用单片机选取可外置存储器STM32F205、LoRa 通讯模块采用可串口透穿的SX1262 芯片、GPS 定位模块选择SKG09A、电源模块采用锂电池供电。
2.1 微控制器
考虑存储数据量的问题及水下功耗较低等要求,采用可外置存储器的单片机STM32F205。该MCU 高集成度,集成1MB Flash 存储器、128KB SRAM、以太网MAC、USB2.0HS OTG、照相机接口、硬件加密支持和外部存储器接口[3]。

图1 水声采集系统硬件架构图
2.2 LoRa
水下信号干扰较强,另受水深影响,需选取传输能力较强的工业级芯片。设计采Hope Microelectronics 公司的RFM95 芯片作为LoRa 无线传感模块[4],采用扩频通信技术,基于ALOHA协议,采用异步方式,根据应用场景睡眠和工作,功耗极低[9]。其在无干扰情况下直线传输距离可达8KM,发射功率可达10W。
2.3 GPS 定位
GPS定位模块主要用于提供声音采集装置的具体位置,系统工作时将具体位置传输给LoRa 网关,LoRa 网关再将位置信息传输到控制端,为更换电池和更换采集装置的位置提供支持。GPS 定位模块选择SKG09A 定位模块,该模块集成RF 射频芯片、基带芯片和核心CPU 及相关外围电路,该模块具有功耗低和灵敏度高的特点[5],适合在水下空间准确定位。本模块通过2、3 引脚首发数据,外围电路设计如图2 所示。
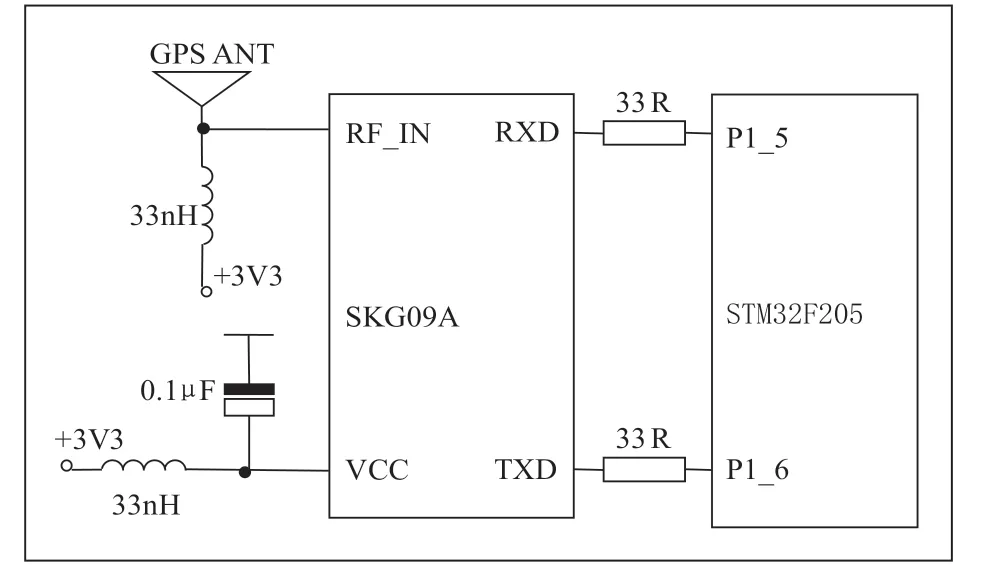
图2 GPS 外围电路连接图
2.4 其他硬件
水声换能器选择安布雷拉DYW-500-E,遵守GB/T3223-94 标准,其工作频率范围是频率:500kHz±7.5kHz,可达100m 水深压力。满足自由场电压灵敏度高、发送电流电压响应强、指向性强的要求[6]。
单片机和LoRa 模块的电源采用3.7V 锂电池降压供电,GPS 定位模块和水声换能器采用锂电池升压供电。
封装材料需具备密封性强和信号传输干扰性弱的特点,选取朔料材料密闭封装,朔料材料对信号传输影响较小,容易封装,且处理方便[9]。
3 软件设计
软件开发采用IAR Embedded Workbench 开发工具,IAR Embedded Workbench 具备完整的交叉编译器和调试器,提供直观用户界面,适合各类嵌入式开发使用[10]。软件部分主要包括水声采集节点工作流程、网关工作流程、上位机工作流程三部分组成。
3.1 LoRa 网关工作流程
LoRa 网关的首先进行初始化,然后与上位机建立连接,根据上位机命令组建网络,根据节点请求允许节点加入网络。对节点发送的数据进行接收并对信息进行解调,将解调后的数据统一格式发送至上位机。
3.2 水声采集节点工作流程
水声采集节点的工作主要是发现LoRa 网络后向LoRa网关发送加入请求,根据网关命令采集水声信息并发送给LoRa 网关,发送信息后如无结束命令则继续采集[11]。整个采集过程需在水声环境平稳下根据传播距离测试,确保实验环境的稳定性。测试其软件工作流程如图3 所示。
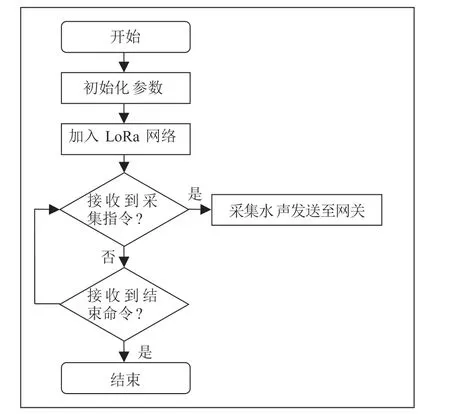
图3 节点软件流程图
3.3 上位机工作流程
上位机主要负责发送采集指令及接受LoRa 网关传输回来的水声信息,采用EMD 算法按频率特征分解水声数据,根据各层信息作为特征参数进行数据分析,达到提取水下瞬态信号特征参数的目的[12]。
4 结语
本文提供了一种基于无线技术LoRa 的水下远程声音信息采集系统的设计方案,本方案可用于水下目标监测、水下野生保护动物声音监测等领域。可为水下作业、水下爆破和机器人水下打捞等提供辅助功能,具有较好的参考价值。
本文的后续研究主要针对水下信道传输、不同水下环境噪声的去噪处理,以及结合水声换能器特性和布局的水下目标定位[13]。
