面向温室大棚辣椒的幼苗全自动移栽方法研究
2019-09-18李建华牛明雷王俊伟李平安
郝 炘,李建华,牛明雷,王俊伟,李平安,李 华
(1. 天津农垦渤海农业集团有限公司,天津301823;2. 天津市宝坻区朝霞街道办事处,天津301800;3. 农业农村部工程建设服务中心,北京100081;4. 北京市植物保护站,北京100029;5. 湖南省益阳市桃江县农业局,益阳413499;6. 内蒙古自治区赤峰市宁城县植保植检站,赤峰024200)
0 引言
我国已成为世界上最大的蔬菜生产国,蔬菜也是我国的主要农作物之一。中国开展“菜篮子”市场体系以来,我国很多地区已经形成了温室大棚直接到超市的“菜篮子”市场体系[1]。蔬菜的生产过程属于劳动密集型产业,人工成本占据了总投入50%以上。
为了提升蔬菜作物效益,目前我国超过60%的蔬菜在育苗阶段广泛采用在育苗棚内培育钵苗的方法,当钵苗的表型特征达到一定阈值时进行移栽[2]。目前的移栽作业有90%以上是通过人工完成的,存在劳动强度集中、生产效率低下等问题,从而影响生产规模与效率,进而制约蔬菜生产的发展。文章研制的温室大棚钵苗移栽机对提高劳动生产率、保证秧苗栽植质量和减轻农民劳动强度具有重要意义。
目前已有相关学者针对移栽机做了一些探索与研究。常用的钵苗移栽机有钳夹式、吊篮式、回转式、挠性圆盘式等4种[2-6]。美国RAPID公司生产的RTW系列移栽机采用钳夹式,通过片状夹具对幼苗进行提取,如图1所示。移栽机可以实现幼苗的抓取、移栽,但是容易使植物受伤,并没有广泛使用。
荷兰学者设计的电控幼苗移栽机基于指针插入式结构,配备了多个相互独立的机械爪及机械臂,采用单电控方式对每个机械爪进行控制,如图2所示,其移栽速度达到100株/min,能够达到人工手动移栽的6~7倍[7]。

图1 RTW-SOOS2移栽机的片状夹持器具Fig.1 Sheet-shaped holding device for RTW-SOOS2 transplanter

图2 电控幼苗移栽机Fig.2 Electronically controlled seedling transplanter
日本的井关蔬菜移栽机采用多杆式移栽,能同时完成打穴、移栽、覆土、镇压等各项工作,但是造价太高,而且当栽植速度提高以后,栽植的质量会降低,因此该机器也并没有得到广泛推广使用。意大利法拉利公司设计的Modello-Futura型移栽机,采用模块集成设计的方法,栽植速度达到3 720株/h,由于必须使用特殊的泡沫钵苗盘,通用性差,而且该移栽机结构过于复杂,再加上采用液压气压驱动,直接导致成本大幅增加,因此用户接受程度也较低。中国农业大学徐丽明在2000年设计了采用多连杆型的玉米自动移栽机取苗设备[8],但该机构关节粗大、连杆繁多、工作过程复杂,在作业时需要巨大的额外空间,整个机器灵活性受到很大限制。目前全自动化蔬菜移栽机[9]因造价高、栽植质量低等因素,制约了蔬菜移栽机的大规模推广使用,即使在发达国家推广效率也保持在较低水平。文章针对辣椒钵苗设计了一种简便易用的自动化移栽设备[10],克服了成本高、质量低等蔬菜移栽机常见问题,能够提高蔬菜移栽作业的自动化水平。
1 总体设计
1.1 系统整体框架
该文以农艺需求为基础,结合国内外现有幼苗移栽机特点[11],对关键部位即曲柄摇杆夹取机构进行分析,针对辣椒幼苗设计了一种包含取、投苗两种功能的自动移栽机。对于辣椒钵苗,温室大棚移栽时一般采取一垄上种植两行或一行,所以取、投苗机构针对不同地块、不同经济作物应有较良好的适应性。该文采用行走轮设计,整体设计如图3所示。移栽机核心功能的两个主要部件分别是回转夹取部件和移栽部件。夹取部件完成取苗工作,移栽部件实现投苗工作,工作流程如图4所示。
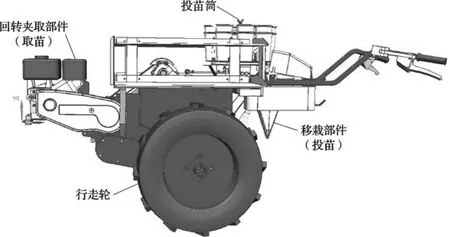
图3 辣椒移栽机整体结构Fig.3 Overall structure of the pepper transplanting machine

图4 移栽机工作流程Fig.4 Work flow chart of the transplanter
1.2 取苗系统结构
1.2.1 取苗流程
取苗机构工作原理如图5所示,其中,A为步进电机输出轴;AB为曲柄;BC为连杆;CDE为摇杆;E为夹取爪。基于穴盘环境下温室作物移栽机的设计经验,该文选择曲柄摇杆作为取苗过程中的夹苗机构[12]。
曲柄摇杆机构为夹苗机构。在摇杆远离连杆的一端安装旋转夹取机构,由定时程序控制夹取与释放。步进电机带动曲柄AB绕轴A转动,曲柄AB通过连杆BC带动摇杆做往复运动,两极限位置分别为取苗位置和投苗位置,进行取苗作业时,顶杆在定时顶出机构的带动下穿过苗盘将钵苗顶出,由摇杆上夹取爪进行抓取,当摇杆到达另一极限位置时,夹取爪收到指令为下一阶段的投苗动作的开启做准备。

图5 取苗机构工作原理Fig.5 Work principle of seedling pulling mechanism
1.2.2 取苗部件设计
取苗机构采用曲柄摇杆夹取方式,其中曲柄为主动件,主动件的动力来源是步进电机,步进电机的选择依据夹取移栽的需求,其各项参数如表1所示。

表1 步进电机相关参数Table 1 Related parameters of the stepper motor
曲柄摇杆机构的作用是从钵苗盘夹取钵苗并送入投苗筒中,为了保证栽植过程顺利进行,应该保证钵苗以垂直姿态进入投苗筒。为了实现该要求,在电机的安装尺寸和机架等其余部件确定的条件下,通过试验测试确定了曲柄摇杆机构的结构参数,其中摆杆的轴心到电机的轴心的垂直距离e为56.4 mm,水平距离f为213.2 mm,曲柄的长度a为80 mm。而根据f、e、a等参数,能够确定电机输出轴与曲柄摇杆夹取机构的铰接轴承之间的距离,设该距离为j(单位:mm),其与电机输出轴的铅垂线之间的夹角,设为β。其公式为:

按照钵苗盘的放置要求,将钵苗盘的倾角设置为30°,从而得到夹取爪在位于夹取位置时,其铰接轴承与步进电机输出轴的连线和夹取爪之间的夹角,设为α1(单位:°),设铰接轴承到摆杆与连杆铰接点的距离为c(单位:mm),连杆的长度设置为b(单位:mm),得到公式为:


夹取爪从钵苗盘取苗后到达投苗筒位置,将钵苗投下,钵苗从夹苗爪脱落,落入投苗筒中,从而可以进行下一个动作,当夹苗机构位于投苗位置时,夹取爪的铰接轴承与步进电机输出轴的连线和夹取爪之间的夹角设为α2(单位:°),得到公式为:

当夹取爪在投苗筒位置完成投苗动作后,夹取爪并不会立刻停下,而是继续向下摆动,然后到达极限点后回摆,必须保证在夹取爪回摆的过程中,不影响钵苗的下落。通过公式(6)~(8)的几何关系得出曲柄、连杆、摇杆的设计长度。

钵苗在投苗筒中的下落过程可以近似认为是自由落体运动,40d苗龄的羊角椒钵苗高度h0=140 mm。则有公式为:

式(6)~(9)中,g为重力加速度值,取10 m/s2,h为夹取爪在投苗筒时摇杆与摆杆铰接点和步进电机输出轴直线的距离(单位:mm);γ为两次路过投苗筒时,曲柄转过的夹角(单位:°);t为两次经过投苗筒的时间间隔(单位:s);ω为步进电机的输出轴的转速(单位:rad/s);h0为40d苗龄的羊角椒钵苗高度。
根据以上过程,计算夹苗机构设计参数如表2所示。此工作参数满足曲柄摇杆的要求,同时夹取爪有较为良好的夹取特性。由于夹取爪的动力由控制信号给出,必须保证夹取与投苗的位置和时间准确,根据所移栽钵苗种类的不同,夹取爪的夹取投苗的时间间隔不同。以辣椒钵苗为例,一般温室大棚辣椒的株距为45~50 cm为宜,栽植速度为60株/min,即1 s完成一次取苗、投苗、复位动作,要求电机的转速为1 r/s。

表2 夹苗机构设计参数Table 2 Clip seedling design parameters
由于不同种类的钵苗在移栽过程中各钵苗的高度与基质的差别,夹苗爪在一定范围内对不同种类的钵苗都有较强的适应性,所以在夹取爪上安装复位弹簧,降低施加在钵苗基质上的压力,依靠控制信号与复位弹簧的共同作用来取苗,降低对钵苗基质的损伤,夹取爪可以根据钵苗基质的变形量自行调节夹取力的大小,保证投苗质量稳定。因此要求:

式(10)中,m0为铰接轴到弹簧接点的距离,该文中取120 mm;m为铰接轴到夹苗爪前端之间距离(单位:mm)。
选取复位弹簧,该设计针对的主要为安达羊角椒钵苗,采样分析得出结果,40d苗龄的安达羊角椒的钵苗平均质量为12.1 g,可得公式为:

弹簧复位系数选取90 N/m,在工作过程中伸长量需大于2 mm,此时满足:

式(11)~(13)中,θ为夹取板与平面夹角;G为辣椒钵苗收到夹取爪两夹取板的压力自身重力N1、N2;G′为沿夹取爪夹取板压力方向的分力。数据表明,安达羊角椒钵苗在夹取爪夹取闭合的过程中不会脱离夹取爪而脱落。
1.3 投苗系统结构
1.3.1 投苗流程
该文参考西瓜籽粒点播机构进行辣椒等蔬菜钵苗的投苗设计,将辣椒幼苗从该机构的顶端喂入,同时捏动把手的传动机构,将底端三角锥张开,辣椒钵苗落入土壤中,人工将该机抬起,完成覆土作业。同时,选择采用“零速投苗”的方式,满足在投苗阶段投苗各机构之间保持相对静止,通过实验将机组前进速度设置为0.5 m/s,投苗筒倾角设置为10°。
1.3.2 投苗部件设计
该设计辣椒钵苗移栽机投苗装置部分需满足在夹取爪将辣椒钵苗从钵苗盘中夹取后完成栽植动作。投苗装置设计图如图6所示,曲柄摇杆式钵苗夹取机构将钵苗从钵苗盘运送到此投苗装置的顶部投苗口进行释放,钵苗落入筒中,同时驱动投苗机构向下运动,底部三角锥张开,将辣椒钵苗栽植进土壤中,完成全部的移栽工作。
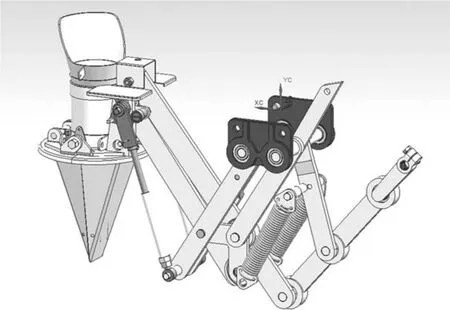
图6 投苗装置设计Fig.6 Design diagram of seedling throwing device
2 移栽机测试实验
在实际应用中,因为基质含水量、夹取爪材料、抓取弹簧劲度系数的变化,会影响辣椒钵苗移栽的成功率[13-15],该文针对该问题设计实验进行研究。
2.1 取苗夹取爪应用测试
该文选择不同材质与弹簧劲度系数,测试不同组合条件下的钵苗取苗成功率,夹取过程中钵苗出现破碎或脱落均视为失败,实验结果如表3所示。
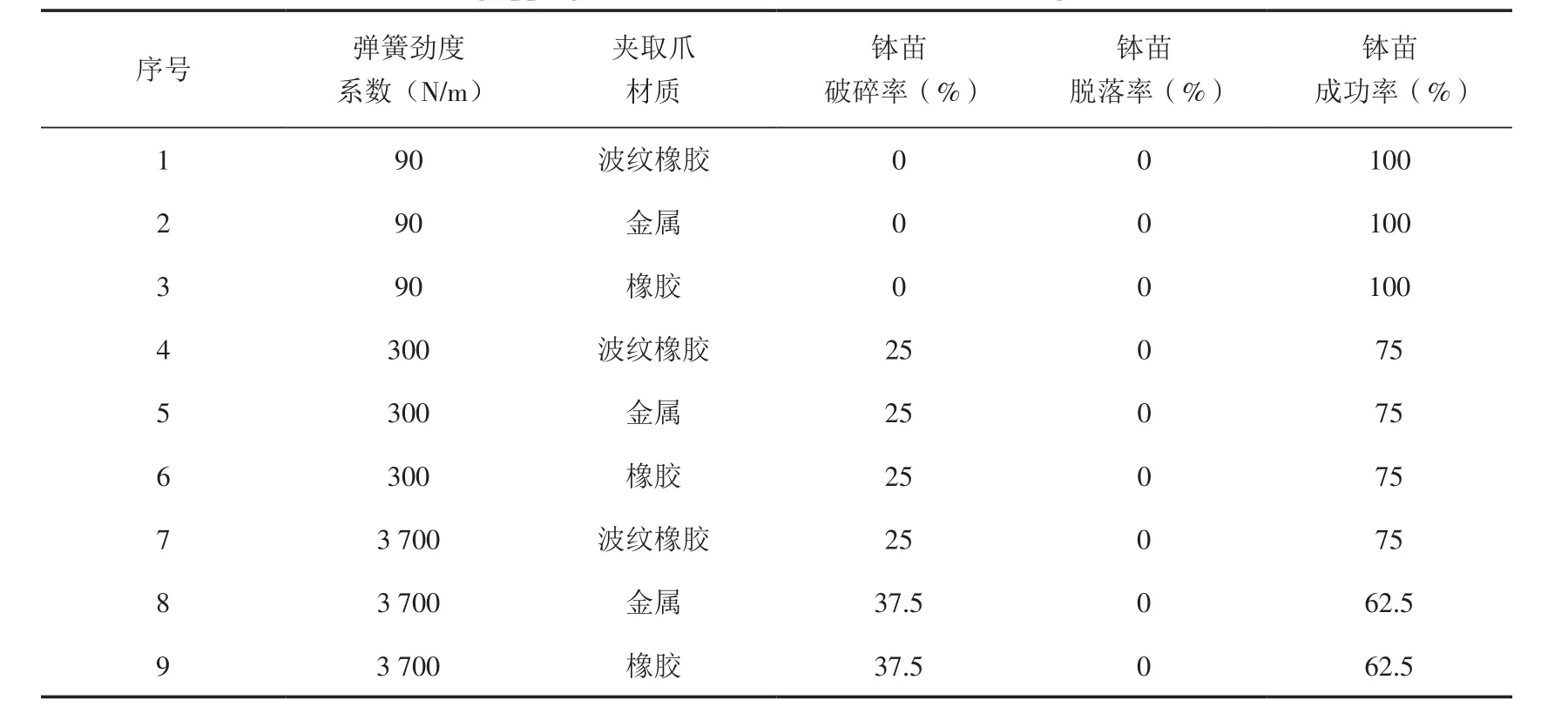
表3 弹簧劲度系数、夹取爪材质的选择对钵苗夹取成功率的影响Table 3 The influence of the spring stiffness coefficient and the choice of the material of the gripping claw on the success rate of the seedlings
通过对比改变弹簧劲度系数、夹取爪材质后,钵苗破碎率、脱落率、成功率等各因素后发现,当弹簧的劲度系数与夹取爪的材质发生改变后,对钵苗的夹取成功率都有很大的影响。当弹簧的劲度系数为90 N/m时无论夹取爪是波纹橡胶还是金属,亦或是橡胶,其夹取成功率均为100%,利用SPSS软件对夹取爪材质的影响显著性进行方差分析(单因素),最终得到P值为0.56,远大于显著性水平(0.05),所以可以得到结论,此3种夹取爪的材质对夹取苗成功率无显著差异。根据表3发现同弹簧劲度系数下不同夹取爪材质所对应的钵苗夹取成功率不尽相同,这种情况主要是辣椒钵苗长势各不相同和试验随机因素导致,夹取爪的材质对取苗成功率几乎没影响。
2.2 前进速度对投苗工作的影响
该文在某温室内,对辣椒钵苗进行投苗实验,投苗基质含水量为24%;在使用移栽装置对辣椒钵苗进行投苗的过程中,对移栽设备设置了不同的行进速度,从0.2 m/s到0.55 m/s不等。随着机组前进速度的提高,钵苗移栽后的直立度会发生变化,在投苗筒倾角的相对位置不变的情况下,改变机组的前进速度,直立度合格率和株距变异系数关系如图7所示。
随着机组前进速度增加,土壤的回流速度增加,使得移栽后的辣椒钵苗得到了及时固定;而当机组的前进速度低于一定值(0.3 m/s)时,直立度受到了很大影响,辣椒钵苗倾倒率很高;当机组的前进速度高于一定值(0.55 m/s)时,钵苗所受牵连速度过大,会导致钵苗前倾现象较大,可能会引发埋苗率大幅增加。实际应用中,行进速度设置为0.4 m/s较为理想。

图7 行进速度对装置的影响Fig.7 Effect of walking velocity on the device
2.3 投苗筒角度对移栽效果的影响
在投苗过程中,最终投苗位置与实际理想计算会有一定偏差,通过试验确定当投苗筒的倾角处于8°~18°时,能够满足“零速投种”要求,当投苗筒的倾角变小时,钵苗的株距变异系数就会越小,直立度会随之升高,但是一旦机组速度增加,必须将投苗筒的角度减小从而满足移栽的农艺要求。该设计采用机组的前进速度为0.4 m/s。当前进速度不变时,改变投苗筒的角度,分析移栽效果的变化,如图8所示。根据投苗角度和机组前进速度对直立度合格率和株距变异系数的影响,最终确定机组前进速度为0.4 m/s,投苗筒垂直倾角为10°的条件下工作效率更高。
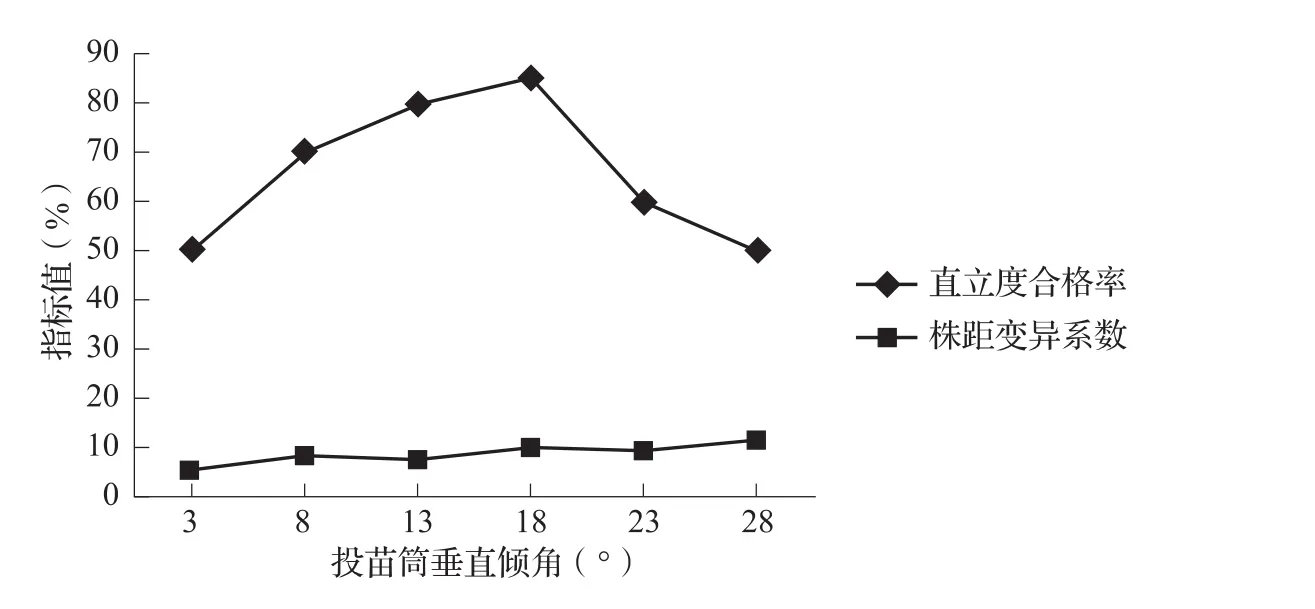
图8 投苗筒的垂直倾角对株距和直立度的影响Fig.8 Influence of vertical inclination angle of seedling tube on plant distance and verticality
2.4 不同速度下取苗成功率与基质含水率实验
为研究不同速度与不同含水率基质对取苗成功率的影响,该文在不同速度下,针对不同含水量基质环境进行取苗实验。实验基于Q128-1型穴盘展开,穴盘为圆椎体空穴,高度45 mm,下孔直径常规16.1 mm、上孔直径长32 mm,规格为16×8,每盘共计128株,局部结构如图9所示。

图9 钵苗盘局部放大Fig.9 Partial enlargement of seedling tray
当基质的含水率升高时,钵苗盘所受外力的限度会发生改变得出基质含水率的高低、取苗速度与取苗成功率的关系,如图10所示。

图10 基质含水率与取苗成功率关系Fig.10 Relationship between substrate moisture content and seedling success rate
根据实验数据得出,随着基质含水率增加,取苗成功率逐渐下降。当取苗速度提升,取苗成功率会随之降低。综上所述,最佳基质含水率为20.45%,取苗速度为80株/min,在基质含水量高于43.09%时,应降低取苗速度至80株/min及以下,以保证取苗成功率。
3 结论
该文针对温室大棚辣椒钵苗的移栽需求,设计了一种自动移栽机,移栽机包括取苗机构、顶出装置、投苗筒、机架等部件。针对自动移栽机进行不同速度、不同含水量基质条件下的投苗取苗测试,得出投苗机最佳运动速度为0.4 m/s,投苗筒的最佳放置角度为10°,基质最适宜含水量为20.45%。最后在不同含水率的基质下通过实验研究取苗成功率的分布规律,得出移栽机从钵苗盘取苗到栽植机构具有较大广泛适用性与简易性的结论,有利于提高温室内辣椒移栽的工作效率与自动化水平。