水稻气力有序抛栽钵苗运动过程研究
2019-05-24姚颖杰王玉兴唐艳芹罗锡文
姚颖杰,王玉兴,唐艳芹,罗锡文
(华南农业大学 工程学院,广州 510642)
0 引言
目前,我国自行研制的水稻抛秧机械种类较多[1-6],而有序式抛秧机一般采用导苗管结构,以实现水稻钵苗的有序移栽。导苗管结构会直接影响水稻移栽的直立度、入土深度及行株距的均匀性[7]。研究导苗管对抛栽效果的影响,往往以最终抛栽效果为指标,进行土槽试验或者田间试验;但是,相应的试验费时费力,且无法反映水稻钵苗在导苗管内运动的情况。因此,有学者采用高速摄影试验的方式[8],观察水稻钵苗在导苗管内某一特定位置的运动情况;但高速摄影只能反映在投影的二维界面内水稻钵苗的运动情况,无法直观地反映水稻钵苗在三维空间的运动状态。为此,有学者提出采用仿真试验的方式进行研究。朱克武等人曾利用LS-DYNA软件,对水稻钵苗抛栽过程进行研究;但受限于当时软件版本以及计算水平,只能分别对水稻钵苗吹出瞬间、水稻钵苗与导苗管后壁碰撞瞬间进行仿真[9-10]。
近年来,随着软件版本的升级及计算机运算水平的提高,运用LS-DYNA软件进行仿真的模型规模呈指数性增长。国内外学者已可以利用LS-DYNA模拟降落伞打开过程、游轮与冰山碰撞过程等复杂的流固耦合模型[11-14]。为此,本文提出利用LS-DYNA仿真方式,以水稻气力有序抛栽为研究对象,研究水稻钵苗的运动轨迹与钵苗在导苗管出口处位置分布,为提高抛栽行株距有序性提供理论依据。
1 水稻气力有序式抛栽原理
水稻气力有序抛栽过程中,工作装置依靠电磁阀控制喷嘴有序喷射气流,吹出秧盘对应穴位中的钵苗。钵苗被吹离秧盘后,经导苗管导向,有序落入田间,进而实现钵苗有序抛栽。导苗管采用4管结构,每个分管对应1组喷嘴,每组喷嘴上排3个,下排4个,对称分布,如图1所示。上排喷嘴与水平面夹角为15°,下排喷嘴与水平面夹角为9°,每个喷嘴喷射气体时间为0.02s。

图1 气嘴序号图示Fig.1 The dynamic graphic of the nozzles’ numbers
2 仿真试验
2.1 仿真试验方法
水稻气力有序抛栽,涉及喷嘴喷射气体、钵苗脱离秧盘及钵苗在导苗管内运动3部分。气体喷射一般采用FLUENT软件进行模拟,因此利用FLUENT建立了五通管模型,模拟抛栽工作时,喷嘴出口处的气流速度,再将此作为水稻钵苗运动模型(LS-DYNA模型)的输入数据,最终模拟出水稻气力有序抛栽钵苗的运动过程。
2.2 建立五通管模型
抛栽工作装置通过五通管结构实现气体的喷射。五通管分为1个进口和4个出口,每个出口对应连接在导苗管各条分管内,而进口则经电磁阀与储气罐连接,电磁阀接通时,4个出口同时喷射气体。
五通管模型采用标准的K-EPSILON模型。设定材料模型为空气模型,密度为1.25kg/m3。设定流体(空气)入口和出口为PRESSURE-INLET,入口压力为0.5MPa,出口压力为0MPa。迭代计算收敛后,导出五通管出口处的速度云图,如图2所示。将每个出口按照图3进行划分,导出Ai、Bi、Ci、Di、Ei各个节点的气流速度,求得平均速度,整理如表1所示。
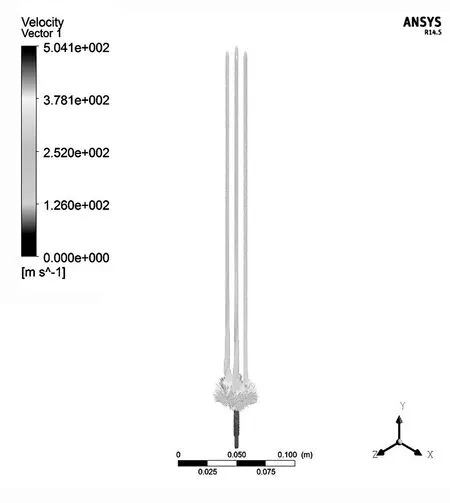
图2 五通管气流速度矢量图Fig.2 The velocity vector chart of the five coupling tube

图3 喷嘴出口节点划分Fig.3 The node division of the nozzle’s outlet表1 喷嘴出口节点速度Table 1 The node velocity of the nozzle outlet
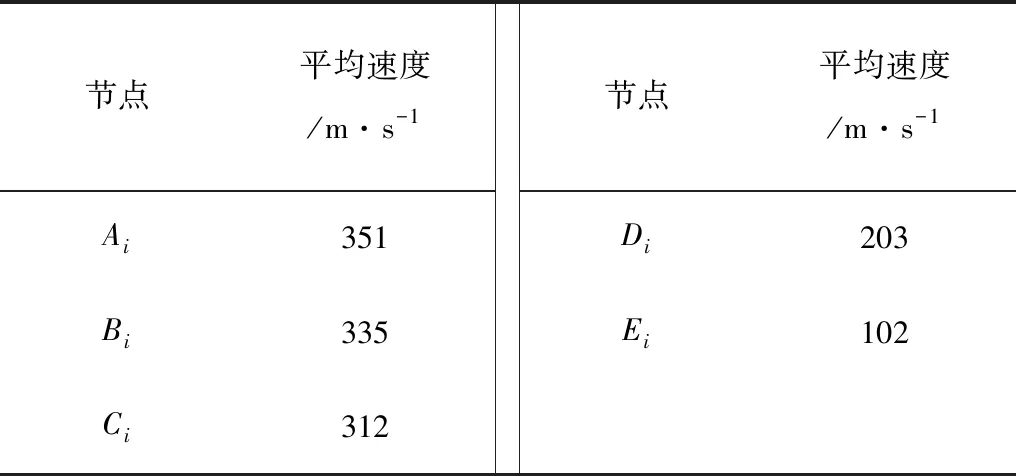
节点平均速度/m·s-1节点平均速度/m·s-1Ai351Bi335Ci312Di203Ei102
2.3 建立钵苗运动模型
水稻钵苗的运动仿真模型,包括钵土、水稻秧苗、导苗管、秧盘及空气。本文利用ANSYS WORKBENCH中EXPLICIT DYNAMICS(LS-DYNA EXPORT)模块进行相应的网格划分、约束定义、重力定义和计算参数定义;之后生成相应K文件,导入LS-PREPOST进行其他关键词的修改。修改的关键词包括各项材料的定义、接触的定义及ALE相关关键词的定义。
本文将钵土、水稻秧苗、导苗管材料模型定义为*MAT_ELASTIC,将秧盘[9]材料模型定义为*MAT_RIGID。各材料模型参数,如表2所示。
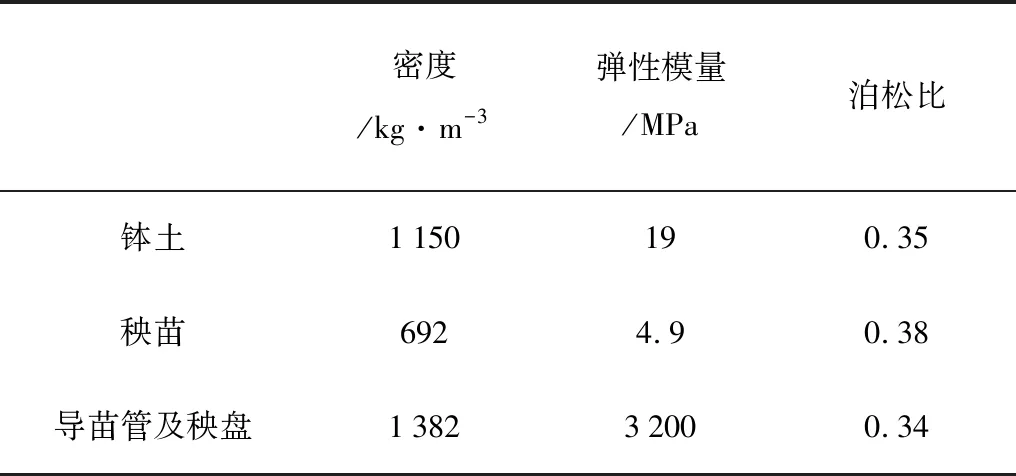
表2 主要材料基本参数Table 2 The basic parameters of main material
将空气材料模型定义为*MAT_NULL。其中,密度为1.25kg/m3,动力粘度系数为1.745 6×10-5Ns/m。空气的状态方程由*EOS_LINEAR_POLYNOMIAL表示,即
p=c0+c1μ+c2μ2+c3μ3+(c4+c5μ+c6μ2)e
其中
式中p—气体压力;
c0、c1、c2、c3、c4、c5、c6—多项式各项系数;
e—内能;
V—气体的相对体积。
仿真模型中,空气模型按理想气体进行参数设定,空气材料基本参数如表3所示。因为理想气体是符合γ律状态方程的气体,故有
c0=c1=c2=c3=c6=0
c4=c5=γ-1
初始状态时,空气模型满足
式中p0—初始气体压力;
γ—比热系数;
e0—初始内能;
V0—气体的相对体积。
其中,比热系数γ=1.4,初始相对体积V0=1。设定初始时空气压力p0=1.013×105Pa,则可得对应e0=2.533×105J/m3。

表3 空气材料基本参数Table 3 The air basic parameters
在ANSYS WORKBENCH生成的原始K文件中,空气模型的单元类型被设定为*SECTION_SOLID,该单元类型不适用于ALE运算,故将其修改为*SECTION_SOLID_ALE。同时,添加用于流固耦合运算的关键词 *CONTROL_ALE以及*CONSTRAINED_LAGRANGE_IN_SOLID。其中,将空气模型定义为MASTER,将其他模型组合并定义为SLAVE。
喷射空气由*BOUNDARY_PRESCRIBED_MOTION_SET关键词定义,该关键词定义喷嘴出口处空气的运动速度。因为每个喷嘴喷射气体时间为0.02s,故将该关键词的生效时间定义为0~0.02s。喷嘴出口处的空气模型各节点速度与表1各节点平均速度相对应。内外管1号喷嘴对应的钵苗运动模型如图4所示。

(a) 内管模型

(b) 外管模型图4 内外管1号喷嘴对应的钵苗运动模型Fig.4 The movement model of the pot seedling thrown from the No.1 nozzle in the inner and outer tubes
3 仿真结果及分析
本文采用LS-PREPOST作为后处理软件,对仿真结果数据文件(D3PLOT文件)进行读取并分析,在该软件中可以直观得到水稻钵苗在导苗管内的运动过程。对每一时刻的钵苗位置图进行叠加处理,能得到水稻钵苗在导苗管内的运动轨迹。
3.1 YZ投影面抛栽轨迹
水稻气力有序抛栽钵苗过程中,导苗管内外管中下段的弯折度差异,会影响钵苗抛栽的行距。研究仿真结果中,YZ投影面内的钵苗抛栽轨迹,为提高抛栽行距有序性提供理论依据。
YZ投影面内,水稻钵苗在内管中的抛栽轨迹如图5所示。各喷嘴抛出的水稻钵苗,在进入内管中段后,均会与中段的左侧面相接触;钵苗在与该面接触之后,均不产生明显弹跳,而是紧贴在该面上向下滑动;钵苗在滑离内管中段左侧面后,进入内管下段;在下段的运动中,各组钵苗均逐渐趋近内管下段的右侧面,最终与右侧面相接触;接触之后,各组钵苗均未产生明显反弹;到达内管出口处时,各组钵苗均靠近出口的右侧。
YZ投影面内,水稻钵苗在外管中的抛栽轨迹如图6所示。各喷嘴抛出的水稻钵苗,在进入外管中段后,也均会与中段的左侧面相接触。其中,第2组钵苗在与左侧面接触后产生了较为明显的弹跳,并与中段的右侧面相碰撞,但该组钵苗最终也和其他组一样,沿着外管中段的左侧面滑入外管下段;在下段的运动中,各组钵苗均趋近并与右侧面相接触;钵苗与外管下段右侧面接触后,均产生了明显的反弹;最终,到达外管出口处时,除第2、4组钵苗外,其余各组钵苗均靠近出口左侧。
在YZ投影面中,无论内管或者外管,钵苗均会沿中段的左侧面下滑,并在同一位置进入导苗管下段;进入导苗管下段的位置相同,提高了钵苗在导苗管下段运动的一致性,使得钵苗在导苗管出口的横向位置有集中分布的特征。

图5 内管YZ投影面内钵苗运动轨迹Fig.5 The trajectory of the pot seedling in the YZ plane of the inner tube

图6 外管YZ投影面内钵苗运动轨迹Fig.6 The trajectory of the pot seedling in the YZ plane of the outer tube
3.2 XY投影面抛栽轨迹
导苗管内管在XY面的投影,和导苗管外管在XY面的投影一样。仿真结果中,XY投影面内的钵苗抛栽轨迹,为提高抛栽株距有序性提供理论依据。
XY投影面内,水稻钵苗在内管中的抛栽轨迹如图7所示。各喷嘴抛出的水稻钵苗,首先会与内管上段的后壁(XY投影面中,导苗管的左端面)碰撞,并产生明显的反弹;各组钵苗与后壁碰撞的位置较为一致,均略低于抛栽初始位置;各组钵苗反弹后进入内管中段,并逐步趋近内管前壁(XY投影面中,导苗管的右端面);除第6组外,其余各组钵苗与内管前壁碰撞后,均产生明显的反弹,各组反弹程度较为相似。但是,各组钵苗与前壁碰撞位置有明显差异,导致钵苗反弹后,在内管下段的运动轨迹差异明显,最终各组钵苗到达内管出口处的位置无明显规律。
XY投影面内,水稻钵苗在外管中的抛栽轨迹如图8所示。各喷嘴抛出的水稻钵苗,在外管上段的运动轨迹,与钵苗在内管上段的运动轨迹基本一致;在外管中段,除了第2、3组外,其余各组的钵苗均会与外管前壁碰撞并反弹。但是,各组钵苗与外管前壁的碰撞位置、碰撞后的反弹程度却有所差异,导致各组钵苗在外管下段的运动轨迹差异明显,最终各组钵苗到达外管出口处的位置无明显规律。
在XY投影面中,无论内管或者外管,导苗管前后壁对钵苗的运动轨迹都没有明确的导向作用。钵苗进入导苗管下段的位置不唯一,加剧了钵苗到达导苗管出口的纵向位置不确定性,进而使钵苗纵向位置分布无明显规律。
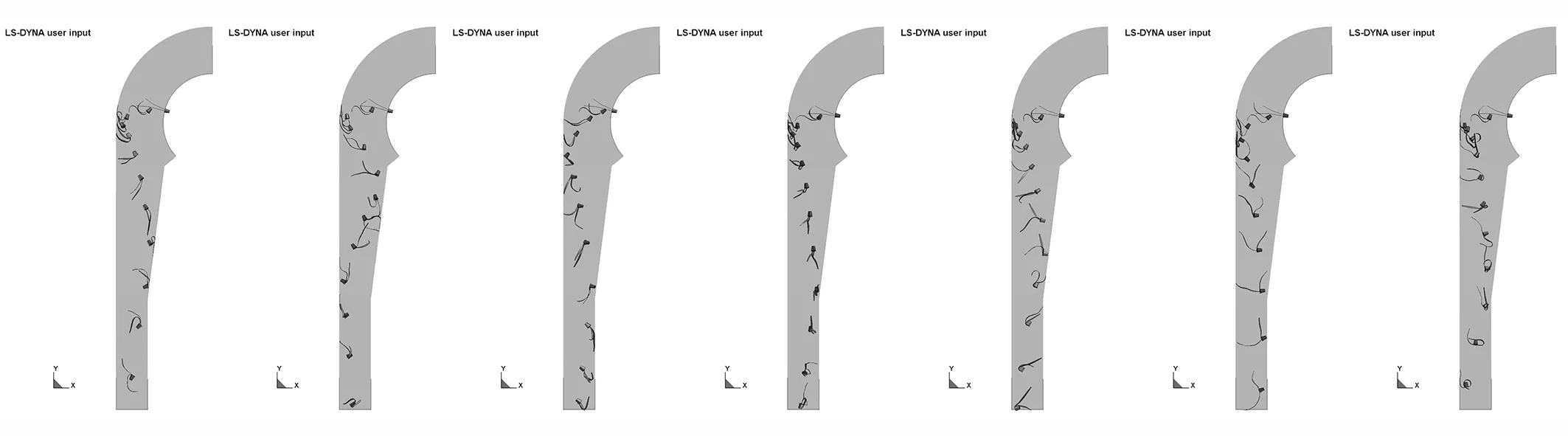
图7 内管XY投影面内钵苗运动轨迹Fig.7 The trajectory of the pot seedling in theXYplane of the inner tube

图8 外管XY投影面内钵苗运动轨迹Fig.8 The trajectory of the pot seedling in theXYplane of the outer tube
4 高速摄影试验验证
4.1 试验装置
为验证仿真模型的合理性,搭建了一套高速摄像装置进行试验。试验装置包括高速摄影机(Phantom Miro系列)、高速摄影激光照明系统、计算机及气力有序式抛秧机,如图9所示。

图9 高速摄像试验装置Fig.9 The device for the high-speed photography experiment
4.2 试验材料与方法
试验所选用的水稻品种为“郑旱10号”,叶龄为2.5叶。试验所用钵苗育秧盘为蜂窝状机抛育秧盘。
试验前,调节各喷嘴的角度,使之与仿真试验中的喷嘴角度一致。试验时,调节气力有序式抛秧机工作气压为0.5MPa,采用抛秧工作档位进行抛秧;此时,喷嘴喷射气体时间为0.02s。导苗管为对称结构,同种类型的管(以内外管区分类型)在理论上,抛栽效果是相同的。因此,抛秧过程中,高速摄影机仅记录导苗管右侧内外管的钵苗运动情况。
4.3 试验结果
试验后,利用高速摄影机配套的PCC 2.6软件对拍摄到的视频进行处理,记录各钵苗到达导苗管出口时所处的位置,并进行统计,如图10所示。其中,记录钵苗位置时,分别以导苗管内外管出口的左侧面以及后壁为基准。
根据图11和图12的统计结果可得:钵苗到达内管出口时,86.3%的钵苗与内管出口左侧面的距离超过0.03m,即86.3%的钵苗位于内管出口的右半部分;钵苗到达外管出口时,76.9%的钵苗与外管出口左侧面的距离小于0.03m,即76.9%的钵苗位于外管出口的左半部分。

图10 高速摄影试验结果Fig.10 The result of the high-speed photography experiment

图11 内管出口处钵苗横向位置分布图Fig.11 The distribution map on the lateral position of the pot seedlings at the outlet of the inner tube

图12 外管出口处钵苗横向位置分布图Fig.12 The distribution map on the lateral position of the pot seedlings at the outlet of the outer tube
根据图13和图14的统计结果可得:钵苗到达导苗管内外管出口时,在出口前后壁之间的位置分布无明显规律;无论内管或者外管,在出口前半部分抛出的钵苗数量,与在后半部分抛出的钵苗数量较为接近,在内管和外管出口后半部分(靠近导苗管后壁)抛出的钵苗数量分别占总数55.5%和52.1%。

图13 内管出口处钵苗纵向位置分布图Fig.13 The distribution map on the longitudinal position of the pot seedlings at the outlet of the inner tube

图14 外管出口处钵苗纵向位置分布图Fig.14 The distribution map on the longitudinal position of the pot seedlings at the outlet of the outer tube
5 结论
1)利用ANSYS FLUENT和ANSYS LS-DYNA相结合的方式,建立了水稻气力有序抛栽的仿真模型,对水稻钵苗在导苗管内外管中的运动过程进行分析,并通过高速摄影试验,验证仿真模型的合理性。
2)水稻钵苗会紧贴导苗管内外管中段的侧面下滑,最终滑入导苗管下段并被抛出。水稻钵苗被抛离导苗管时,在出口处的横向位置有集中分布的特点,与钵苗在中段的运动轨迹有关。导苗管的前后壁对钵苗的运动轨迹没有明确的导向作用,导致最终钵苗在出口的纵向位置分布较为分散。