基于轮廓信息的目标候选区域提取算法
2019-09-16胡永兵
章 新,王 年,唐 俊,胡永兵
(安徽大学 电子信息工程学院,安徽 合肥 230601)
目标检测是计算机视觉研究中的一个重要领域.目标快速检测与目标准确定位是目标检测领域中两个重要的研究方向,其在医学工业、行人检测、遥感图像分析、车牌定位识别中有着重要的应用前景.目标检测方法有多种,近年来基于滑动窗口检测方法的应用非常广泛,并得到很多学者的关注[1-5 ].
通过分析文献[10]算法的检测结果,发现背景窗口的数量达到整个候选区域数量的一半以上时,后续的检测、识别处理会受到直接影响.如果能识别出背景区域或直接跳过背景区域检测,就可以提高检测效率.基于此想法,论文使用Prewitt算子提取图像特征,采用二值化标准梯度特征方法来训练两个级联的二值化线性分类器,在使用非最大值估计候选区域后利用轮廓信息筛选候选区域.由PASCAL VOC 2007数据库上对论文方法的广义评价结果可知,平均每幅图像产生780个目标候选区域,获得召回率为0.936.
1 特征与颜色空间
1.1 Lab颜色空间
Lab颜色空间能够非常好地描述一切光源色与物体的颜色[11].Lab颜色空间描述的是颜色的显示方式,是一种与设备无关的颜色模型,也是一种基于生理特征的颜色系统.它是用数字化的方法来描述人的视觉感应,弥补了RGB模式依赖设备色彩特性的不足.Lab颜色空间用虚构的均匀颜色分布替换了原有的色彩分布,弥补了RGB色彩模型中色彩分布不均的缺点.因此,论文将采用Lab颜色空间对物体的颜色进行描述.
1.2 二进制Prewitt算子
目标与背景的很大区别之一是目标具有良好的闭合边界.Prewitt算子是利用目标区域中像素点左右、上下邻点灰度差值是否达到极值来检测边缘.它对噪声具有平滑的作用,错检率低.论文先按照不同比例将目标图像缩放成36种不同尺寸大小的窗口,再使用Prewitt算子代替梯度幅值来计算物体的特征值,经过观察得知使用Prewitt算子计算的特征会使目标之间显示出更强的相关性.如图1所示,使用Prewitt算子得到的模板边缘处的特征值比中间的特征值亮度要高一些,即模板中间目标区域的特征值较边缘处的特征值亮度要低,而使用梯度幅值计算特征得到的模板表现的特性比较杂乱.
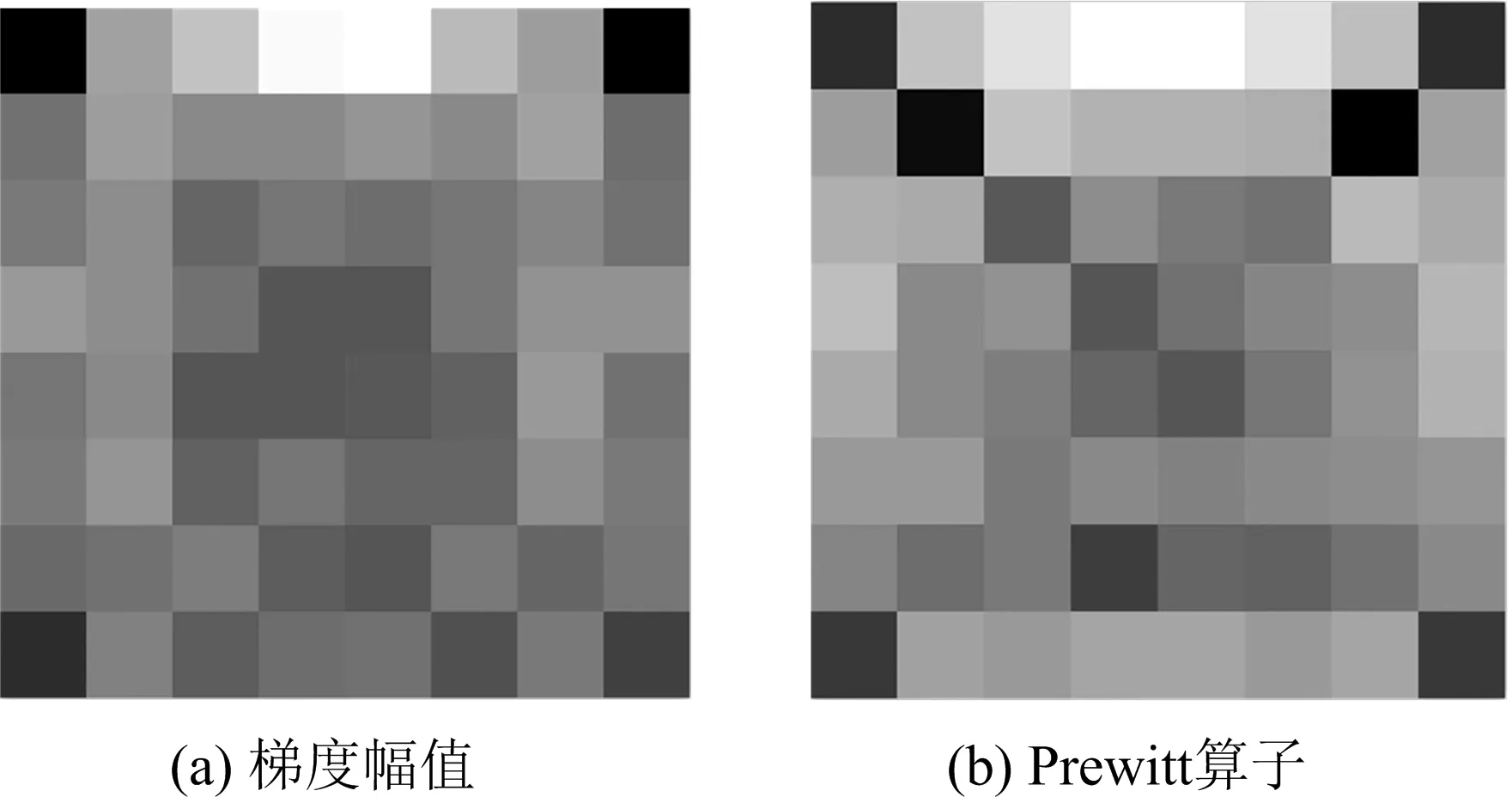
图1 训练模板
Prewitt算子[12]是一种利用周围8个邻域像素的值来确定这个像素梯度的算子.它的4个模板由4个卷积核形成,如图2所示.在处理时,图像中的每个点都使用这4个模板进行卷积.
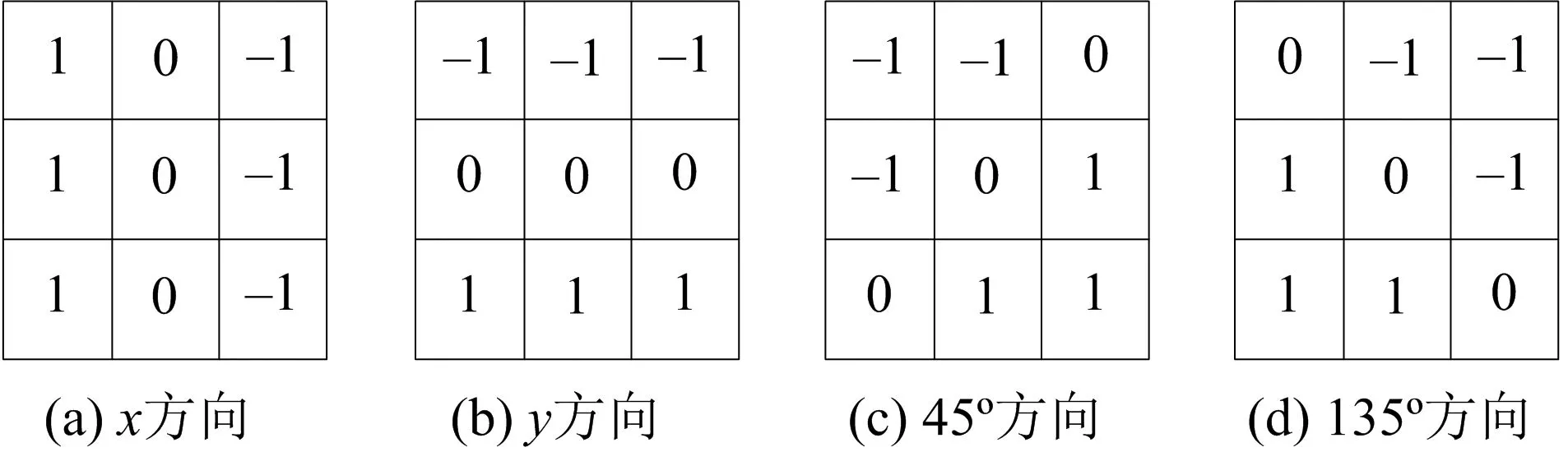
图2 Prewitt算子模板
在计算图像中每个点的特征值时,先分别使用x方向、y方向、45°方向和135°方向的模板计算水平方向的特征S1、垂直方向特征S2、斜边方向的特征S3和S4.用Prewitt算子求特征值的表达式为
(1)
(2)
(3)
(4)
然后将x方向的特征S1与y方向的特征S2融合成一个方向特征gradl_x,45°方向的特征S3和135°方向的特征S4融合成斜方向特征gradl_y.最后采用min(|gradl_x|+|gradl_y|,255)融合成该点的特征值,并将其存入一个byte中.
从文献[13]可知将模板二值化有很多的优点,因此论文使用二值化标准梯度特征方法来二值化Prewitt算子提取后的特征.由于候选目标窗口的位置不同,Prewitt特征会有不同的权值,所以使用等式(5)来近似计算候选区域内存在目标的可能性得分,从而快速获得目标候选区域
OL≈vi·sl+ti,
(5)
其中:vi,ti∈R分别代表学习获得的尺寸i对于模板W的系数和偏移量;sl≈〈WC,gl〉是滤波器得分,gl是标准化Prewitt特征,l是位置,i是尺寸.
2 候选区域检测
2.1 非最大值约束检测
非最大值约束是用来对候选目标窗口进行预测的方法,先将待检测的图像重构成训练所获得的目标尺寸大小,若是候选目标尺寸越多,则检测的范围就会越广;然后再对重构后的图像进行Prewitt特征的计算,依据这些特征使用非最大值约束提取候选目标窗口的基点;最后将这些基点结合训练目标尺寸构建出目标候选区域.
目标检测耗时的关键因素之一是目标候选区域的数量.在保证检测精度情况下,为了减少候选区域的数量,论文利用物体的轮廓和训练模板获得目标尺寸进行候选区域的选择与构建,结果显示提取的候选区域数量只有文献[10]中产生窗口数的一半,且召回率较高.
2.2 基于轮廓信息的候选区域检测
基于轮廓信息预测候选区域是在基于非最大值约束方法构建出候选区域的基础上对候选区域进行选择、提取,从而确定最终的候选目标窗口.如图3所示,物体的轮廓信息是比较完整的,且其中描述物体的轮廓数也是较多的,而背景的轮廓信息是松散的.虽然其围成的轮廓数目很多,但是其轮廓围成的面积却是相对较小的.
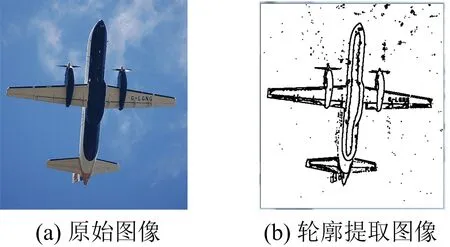
图3 轮廓信息图
基于此种特点,使用轮廓信息对候选区域进行二次筛选,即在使用非最大值约束的方法构建出候选区域之后,再利用轮廓信息,确定候选区域中的完整轮廓的数目和有效轮廓数目,以数目多少来表示一个候选区域是有效的可能性,并基于此对候选区域进行评分,再进一步根据阈值确定候选目标窗口的信息.为了减少筛选候选区域的时间,将候选区域重置成32×32大小后,再利用轮廓信息进行筛选.
2.3 整体算法框架
为了有效地减少候选目标窗口的数量,论文在文献[10]算法的基础上进行了改进.图4给出了改进后的算法流程.首先进行参数训练,得到相应参数与模板;然后再输入测试图像产生的一系列不同大小Prewitt特征,用非最大值进行预测,再使用轮廓信息进行二次筛选;最后用训练图像注释来核实标记.
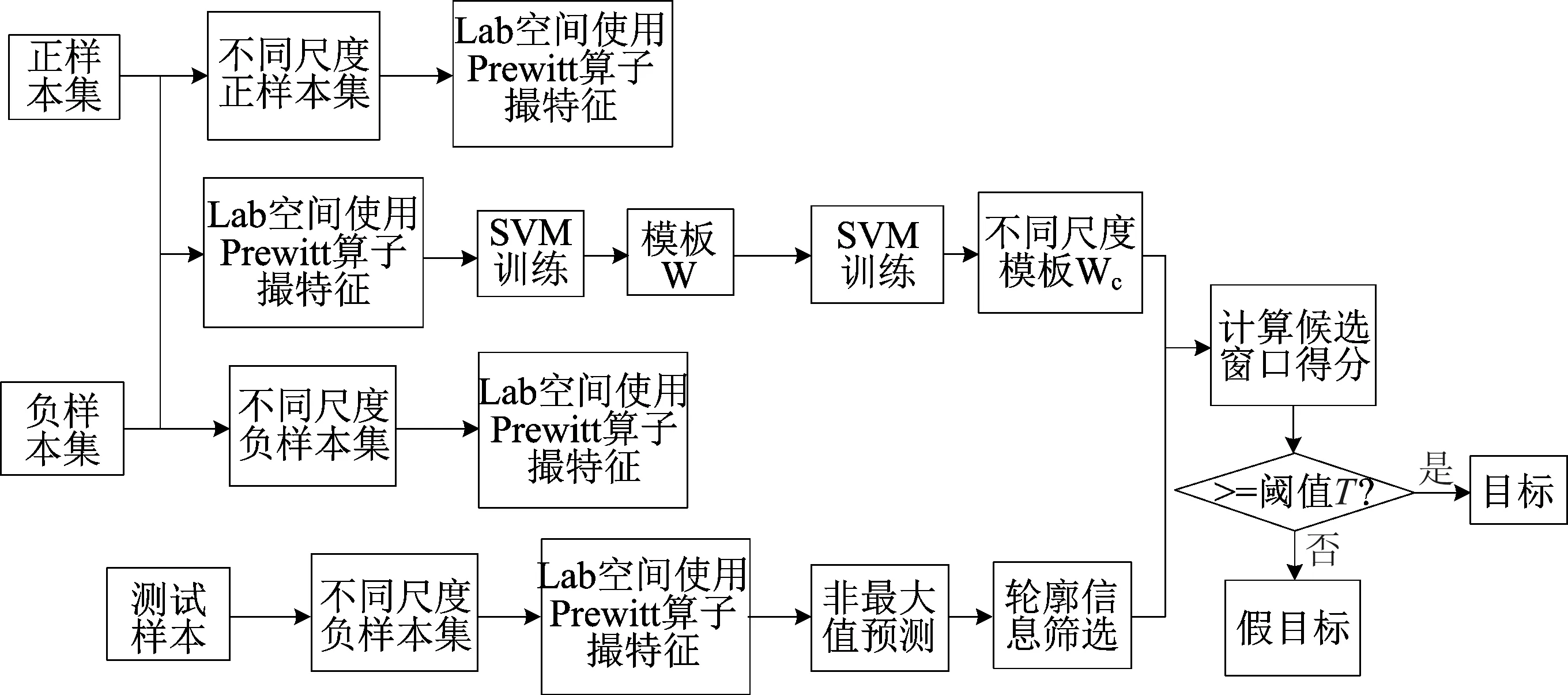
图4 算法框架
3 实验结果与分析
论文算法的运行环境为Intel(R) Core(TM) i7CPU的PC和Windows 7操作系统,算法实现平台是Visual Studio2012,在PASCAL 2007数据库上进行了验证.算法的评价指标为召回率.在对算法进行评价时,将评估结果与文献[9-10]的结果进行对比,采用的均是作者提供的源码.召回率计算式为
(6)
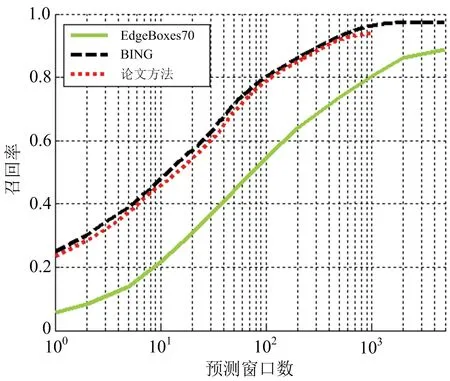
图5 召回率结果
图5给出了3种方法的候选区域数量与召回率之间的关系曲线图.从图中可以看出论文方法的召回率比文献[9]方法的召回率高,且候选区域数量比文献[10]方法的候选区域数量少.表1给出了论文方法与另外两种方法在PASCAL 2007数据库上平均每幅图像产生候选区域数量的差异以及平均处理时间.论文算法处理每幅图像的时间不是很长,但是相较于文献[10]的方法,计算效率还有待提高,这也是下一步研究需要改进的方面.

表1 候选区域预测与目标检测时间
图6为两种方法提取的候选目标区域.
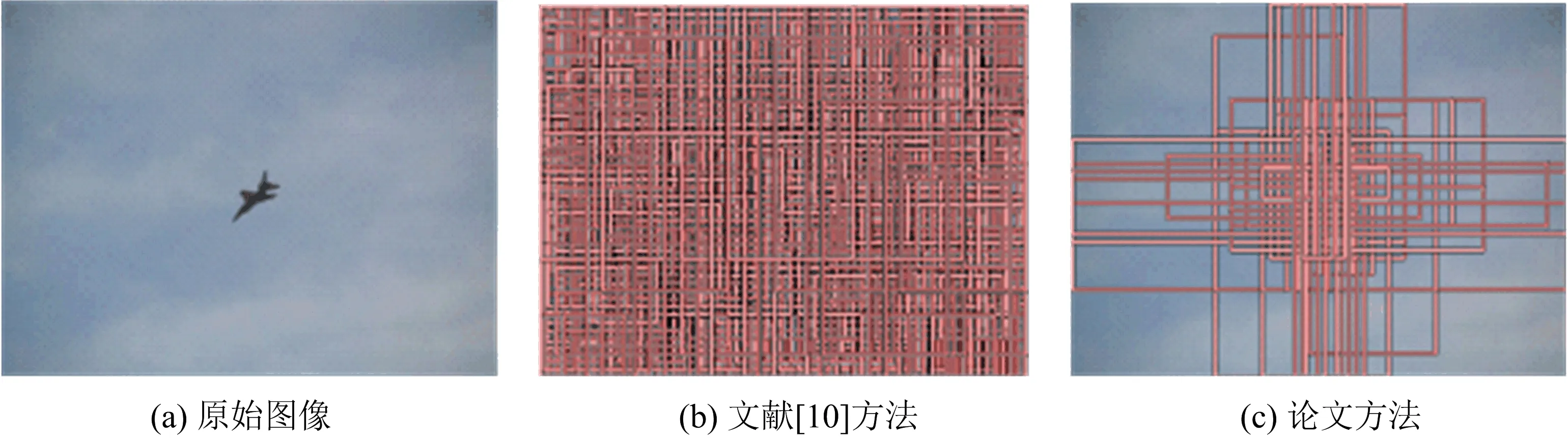
图6 两种方法提取的候选目标区域
结合表1和图6来看,采用论文方法产生的候选区域主要集中在有物体区域,且平均每幅图像产生的候选区域数较文献[10]方法少了近一半,有效减少了后续检测、识别的处理时间,这归结于论文采用了轮廓信息进行了二次筛选.论文方法是在文献[10]方法的基础上加入了轮廓信息进行二次筛选的改进算法,在筛选时可能存在着误差,因而召回率相较于文献[10]方法略微有所降低.文献[9]方法的实现平台是Matlab,运行时间相对较长.
4 结束语
论文提出了一种基于非最大值约束的基础上进行二次提取目标候选区域的算法.以Lab颜色空间对物体的颜色进行描述,利用Prewitt算子提取特征,采用二值化标准梯度特征方法训练出具有出色检测能力的二值化模型,以非最大值来构建出初始候选区域,最后使用轮廓信息进行二次筛选.评估结果表明:论文算法在保证了较高目标召回率的同时,候选区域数量也较文献[10]方法少了近一半;同时,在一些背景简单或单一的目标检测中,论文算法产生的目标候选框数量低于70,这对背景简单或单一的目标检测具有积极意义,有效减少了后续检测、识别的处理时间.虽然论文算法处理每幅图像的时间不是很长,但是相较于文献[10]的方法,计算效率还有待提高,这将是作者后续研究需要改进的地方.