高速行驶车辆位置信息快速检测系统设计
2019-09-12纪少波刘振革2韩文扬3韦金城3
王 豪, 纪少波, 刘振革2, 韩文扬3, 韦金城3, 李 萌
(1.山东大学 能源与动力工程学院,山东 济南 250061; 2.山东技师学院 汽车工程系,山东 济南 250200;3.山东省交通科学研究院,山东 济南 250031)
车流量检测、车速检测、交通信号控制智能化及违章拍照等属于交通领域的常规工作。这些工作都离不开车辆行驶位置信息的监测,目前车辆位置信息有多种测试方法,如超声波检测、红外线检测、雷达检测及地感线圈检测等[1-4]。其中,地感线圈检测方法由于具有精度高、成本低及使用方便等优点,得到了更多的应用[5-7]。目前车辆位置检测研究多数采用计数设定时间内的脉冲个数的方法分辨频率的改变量[8-9],这种检测方式为了提高精度,需要采用较长的计数时间,由此带来了响应时间长的问题,无法满足高速行驶车辆位置信息检测的要求。市场上的车辆检测器大多用于低速车辆位置信息检测领域,如停车场、地下车库等场合。但这些车辆检测器均存在车辆位置信息检测时间长、反应速度下降等问题,对高速路上大量行驶的车速快、车长短的轿车而言,这种处理方法存在严重的漏判问题,难以适应高速行驶车辆位置信息检测。有必要采用改进的处理方法提高地感线圈的检测速度,满足高速行驶车辆位置信息检测的需要。
1 系统整体结构设计
系统提出了一种以单片机为核心的高速行驶车辆位置信息检测装置及方法,其整体结构设计如图1所示。本系统设计电路采用LC振荡电路产生正弦信号,经过整形电路转换成标准的TTL电平信号,单片机通过输入捕捉功能捕获车辆经过时的脉冲信号。车辆行驶经过地感线圈时,由于车辆切割磁场的作用,在车辆内部产生自成闭合回路的感应电涡流,电涡流的磁场方向与原有的磁场方向相反,导致地感线圈的电感量减小,从而引起LC振荡电路输出脉冲信号频率增加[10-12]。单片机通过定时器功能检测输出脉冲信号频率的变化,判断车辆的位置,并通过开关量信号输出电路、指示灯输出、蜂鸣器输出及通信输出等多种方式将车辆位置信息进行指示。此外,为了防止系统工作异常,设计了单片机外部自动复位电路,在长时间检测不到车辆行驶通过时,电路发出控制信号,令单片机复位。
车辆行驶至地感线圈位置时,地感线圈电感的微弱变化能够使振荡电路的频率产生改变。由于频率的改变量小,加上干扰成分的影响,如果只测量一个脉冲信号的周期变化存在误差。所以目前的车辆位置检测多采用测量设定时间内的脉冲个数,这种方式对于高速行驶的车辆会带来检测不出来的问题。另外,如果脉冲信号存在瞬间的干扰信号,不容易去除,这种方法会存在较大的误差。为此本系统改进检测算法,通过单片机定时模块获取多个脉冲的持续时间,通过增加脉冲数的方式增加计时时间,提高位置信息检测的精度;系统在计数持续脉冲总时间的过程中,同时实时测试每个脉冲的时间,如果发现脉冲时间过短,则判断该脉冲信号为高频干扰的影响,进而将该脉冲去除,据此消除高频干扰对计数时间的影响。根据地感线圈振荡电路的常用频率范围及车辆位置检测信息的精度,这种方式的检测时间一般可以控制在5 ms以内,有效地提高了车辆位置检测的速度。
2 系统硬件结构设计
2.1 LC振荡电路设计
系统的硬件由环形地感线圈、振荡电路、单片机及输出信号处理电路等部分组成。环形地感线圈通常埋在路面以下,长宽各约1.5 m。当线圈中通以电流时,在地感线圈的周围就会产生电磁场。对于匝数为N,长度为l的螺线管型线圈,其线圈内的磁场自感量为
(1)
式中,μr为介质的相对磁导率;常数μ0=4×10-7h/m;A为线圈的环绕面积当车体经过线圈时,车体切割线圈产生磁场。车辆金属部件产生感应电涡流,电涡流产生的磁场会引起感应电流磁场的变化,由线圈的电感量公式可知,当车辆从环形线圈上通过时,线圈作为振荡电路的一部分,其电感量会减少。
振荡电路首先采用1∶1隔离变压器与地感线圈相连,隔离变压器的另一端串联两个电容构成LC谐振电路,该谐振电路的谐振频率为
(2)
图2为振荡信号电路,通过反接稳压管使正弦振荡信号幅值限制在5 V之内,振荡电路供电为+5 V,通过电阻的分压,使振荡电路的PNP三极管工作在放大状态。振荡电路起振后产生正弦波,并传送至NPN三极管的基级。三极管的发射极等效电阻较低且通过增加电容,用于通过硬件消除高频干扰脉冲的影响。当所加电压高于三极管的导通电压时,三极管导通,输出低电平;当所加电压小于导通电压时,三极管截止,输出高电平,将正弦信号转换为矩形波信号。

图2 振荡信号电路
2.2 单片机及信号处理电路设计
单片机及信号处理电路包括单片机及周围电路、开关量输出信号处理电路和TTL整形电路等,如图3所示。单片机采用Freescale公司生产的S9S08DZ60单片机,该单片机片内自带输入捕捉、两个定时器模组,总线频率最高可达20 MHz,满足装置的功能需求。开关量信号输出电路则通过NPN三极管将车辆到来状态信息转化为5 V和12 V电平向外输出。TTL整形电路采用施密特触发器CD4093芯片将振荡电路产生的矩形波信号转换成标准的TTL电平信号,送入单片机的输入捕捉功能引脚中。另外,单片机电路包括蜂鸣器及LED灯电路,通过声音及灯光提示车辆到来信息。另外,为了便于装置与其他系统关联,设计了RS232通信功能,可以通过通信方式传递相关参数。
2.3 单片机自动复位电路设计
单片机自动复位采用了两种工作模式。
(1) 由MAX708芯片及其外围电路组成复位电路,MAX708的低电平复位输出脉冲端与单片机复位引脚相连,如图4所示;利用单片机的定时器定时向MAX708芯片发出控制信号,当单片机由于干扰等原因死机时,MAX708收不到单片机发出的控制信号,则该芯片的复位输出脉冲端产生200 ms的复位脉冲输出,使单片机复位,重新进入工作状态。
(2) 本系统的装置主要用于高速公路领域,车流量大,根据这个特点提出了第二种复位模式:根据道路

图4 单片机自动复位电路
的车流量情况,确定一个无车辆通过的最小时间限值,单片机通过定时器确定设定时间内是否有车辆通过,如果没有则认为系统工作异常,通过单片机控制MAX708的手动复位引脚发出控制信号,令单片机复位。
3 程序控制系统设计
3.1 工作模式设定
在地感线圈实际使用过程中,由于不同地感线圈的匝数和面积存在差异,造成地感线圈的输出电感量存在一定差异;此外安装环境的差异、外界温度的变化以及车辆经过路面时对地感线圈的挤压变形,均会对地感线圈的电感量造成影响。因此,需要对设定脉冲个数对应的脉冲时间计数值进行标定,以满足不同条件下的使用要求。本系统有两种工作模式,即自动标定模式和正常工作模式,每次装置上电复位后,首先进入自动标定模式,标定结束后,进入正常工作模式,系统程序工作流程图如图5所示。

图5 程序设计框图
自动标定是在检测电路复位瞬间,无车辆经过条件下,通过对设定脉冲数对应的时间进行统计的方式获取。在检测电路上电或复位瞬间,且无车辆经过条件下,通过单片机的输入捕捉功能捕捉下降沿信号,得到连续10次设定脉冲个数的时间计数值;去掉计数值中的最小值和最大值,得到剩下8次计数值的平均值,将此值作为当前安装环境下无车辆通过时,单个脉冲的持续时间计数值,该值与设定脉冲个数的乘积即为标定得到的计数基准值。自动标定结束后,自动进入正常工作模式。
正常工作模式:通过单片机的输入捕捉功能得到设定脉冲数对应的时间,具体实施过程如下:假如设定的脉冲数为m,振荡电路输出的矩形波信号经过CD4093处理后进入单片机的输入捕捉引脚,将该脉冲的持续时间与之前脉冲的持续时间累加;另外,脉冲个数加1,当脉冲个数达到m时,得到的总累加时间即为当前情况下设定脉冲数对应的时间。
得到设定脉冲数对应的时间后,将该时间与标定模式得到的基准时间进行比较,如果设定脉冲数对应时间与基准时间的差值未超过设定限值,则认为无车辆经过。如果超过限值,则继续判断下一次设定脉冲数对应的时间,只有当连续3次设定脉冲数对应的时间与基准时间的差值均超过设定限值,则认为当前车辆行驶至地感线圈位置。
3.2 干扰信号处理
图6为异常干扰信号的示意图,此类干扰信号多为高频成分,持续时间短,如果未能去除,将导致设定脉冲数统计的时间缩短,影响统计的精度。为此,每当一个脉冲信号到来时,将每个脉冲的时间计数值进行存储,并将连续得到的20个脉冲的时间值按大小排序,去掉2个最大值和2个最小值后,求得剩余16个脉冲时间的平均值。将当前脉冲的计数值与平均值比较,如果差值的绝对值未超过设定限值,则认为当前脉冲是正常信号,将当前脉冲的计数值进行累加;反之认为当前脉冲是干扰信号,计数值不予累加处理。通过这种处理方法消除异常干扰信号对设定脉冲数对应时间的影响。

图6 异常干扰信号去除方法
3.3 自动复位模式设计
装置采用了两种复位模式,其中模式一在程序中定时给MAX708发出控制信号,如果程序工作正常,控制信号会定时发出,此时MAX708不会输出单片机复位信号;当程序死机时,定时控制信号无法发送,MAX708给单片机发送复位信号,实现程序死机时的复位设计。模式二则通过定时器计时时间,在计时的过程中判断是否有车辆通过,每次车辆到来自动将定时器的定时时间清0;当定时器的计时时间超过设定时间,仍无车辆到来的状态,则认为系统工作异常,通过MAX708芯片实现系统的复位。
4 模拟试验测试
4.1 振荡电路测试
本系统是根据地感线圈与电容形成的LC振荡电路对车辆通过时的信号进行判断,为了验证设计电路的可行性,首先对设计电路进行电路图仿真测试。电路图仿真软件为LTspice XVII模拟器,运行已搭建完成的LC振荡电路,如图7(a)所示,图7(b)为仿真软件输出信号波形。经过仿真软件分析,搭建的电路能稳定地输出振荡信号,改变模拟线圈的电感量,输出振荡信号的频率有明显的变化。

图7 仿真软件测试
4.2 模拟测试
在实验室中用该系统和铁板对车辆经过地感线圈进行模拟测试,用示波器捕捉电路中的频率变化,测得铁板经过前和经过时的振荡信号如图8所示。无铁板经过时测量频率为106.032 kHz,铁板经过时振荡信号频率增加到107.103 kHz,通过上述正常工作模式可有效检测出频率变化。由于铁板质量较轻,在实际道路上的应用会产生更好的频率变化效果。
5 结论
① 本文设计了基于地感线圈的高速公路车辆检测装置,车辆通过地感线圈时,LC振荡电路输出脉冲信号频率发生改变,单片机捕捉脉冲信号的频率变化,判断车辆位置。
② 系统有两种工作模式,自动复位模式中对设定脉冲个数对应的脉冲时间计数值进行标定;正常工作模式下,通过单片机定时模块获取多个脉冲的持续时间,通过增加脉冲数的方式增加计时时间,提高检测精度的同时,也有较快的检测速度。
③ 为了减少干扰信号的影响带来车辆误判,本系统改进算法,实时测试每个脉冲的时间,去除高频干扰的时间计数值;并在系统长时间检测不到车辆通过时,
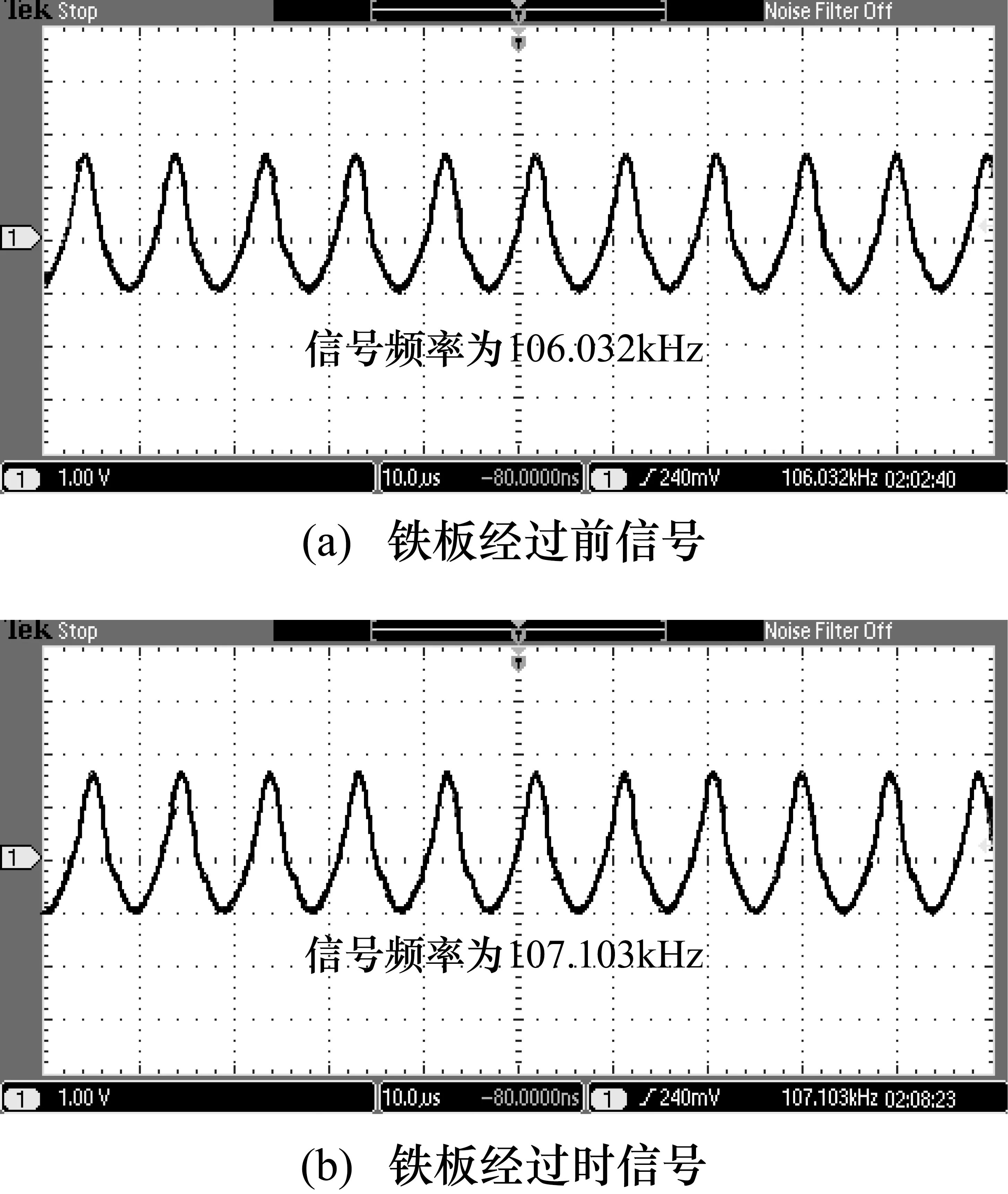
图8 铁板经过前和经过时的振荡信号
进行自动复位,进入自动标定模式。
④ 对系统进行模拟试验测试,试验结果表明,LC振荡电路能产生稳定的正弦信号,当模拟车辆经过时,单片机能捕捉到信号的频率变化,并进行精确有效的判断。
