应用于机器人标定的主动式靶标装置设计与精度优化
2019-09-12宋光明温秀兰韦中宋爱国
,宋光明,温秀兰,韦中,宋爱国
(1.东南大学 仪器科学与工程学院,江苏 南京 210096; 2.南京工程学院 自动化学院,江苏 南京 211167)
随着机器人技术的快速发展,工业机器人的应用领域也在不断地拓展。然而工业机器人较差的绝对定位精度限制了其在高端制造领域的应用。目前主要利用机器人标定技术提升工业机器人的精度性能[1-3]。在机器人标定技术中常用的测量设备有三维视觉测量设备、激光干涉仪、球杆仪、激光跟踪仪等[4-8],其中激光跟踪仪是目前较为常用的位置或位姿测量设备。但激光跟踪仪的测量范围受限于被动式靶标的光线接收角度,一般仅为±30°。研究表明,较小的测量范围会降低工业机器人的标定精度[9]。主动式靶标能够通过微型伺服电机主动调节靶球的朝向,从而扩大了激光跟踪仪的测量范围。譬如API公司生产的二自由度主动式靶标和莫斯科国立工业大学的Kosterev等人所设计的二自由度主动式靶标[10]。但这两种主动式靶标都需要较高的制造装配精度,极大地提高了装置的制造成本和难度。
为降低装置的制造成本并保证测量精度,设计了一种具有三自由度的主动式靶标装置,能够实现激光跟踪仪的大范围测量。并针对加工装配等因素导致的测量误差问题,提出一种精度优化方法。该方法利用圆点分析法与基于距离平方误差模型法精确地辨识了主动式靶标装置的DH模型参数,并将装置的测量误差补偿到激光跟踪仪的测量位置向量中,实现高精度的空间点位置测量。
1 工业机器人标定系统简介
工业机器人标定系统原理图如图1所示。图1中坐标系OBXBYBZB为工业机器人的基坐标系,坐标系OLXLYLZL为激光跟踪仪的测量坐标系,坐标系OTXTYTZT为工业机器人的工具坐标系。涉及的测量过程均符合GB/T 12642-2013与ISO9283工业机器人性能规范及其试验方法标准[11-12]。图1的左侧为埃夫特智能装备股份有限公司所生产的工业机器人ER10L-C10,末端负载最大为10 kg,重复定位精度为±0.05 mm,轴1~轴6的运动范围分别为±175°,+64°/-162°,+165°/-81°,±178°,±132°,±180°。所设计的主动式靶标装置安装在该机器人的末端法兰盘上。图1的右侧为海克斯康有限公司生产的激光跟踪仪Leica AT960,该设备的测量不确定度为±(15 μm+6 μm/m)。

图1 工业机器人几何参数标定系统
2 主动式靶标装置及DH模型辨识
2.1 主动式靶标装置的机构设计
图2为所设计的主动式靶标装置。该装置主要包含3个微型直流伺服电机与一个1.5 in的靶球,其中伺服电机的轴线相交于靶球的中心,分别用于调节靶球的3个轴线方向。微型直流伺服电机角度控制精度为0.088°,通信总线为RS485。其中1号微型直流伺服电机通过L形连接件与工业机器人末端法兰盘固定连接。
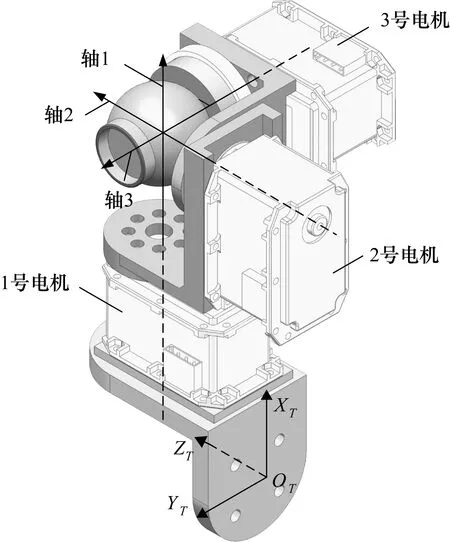
图2 主动式靶标装置的三维模型
但因机械加工精度低与装配误差等问题,3个微型直流伺服电机的轴线并未相交于靶球的中心,这将引入较大的位置测量误差,且该误差随着靶球的运动而变化。因此,将该装置视为一个三自由度串联机器人,首先利用DH模型对其进行运动学建模,并通过几何参数标定获取精确的DH模型参数。基于该模型计算得到靶球中心的精确空间位置,并基于坐标系转换方法将该误差补偿到激光跟踪仪的测量坐标中。
2.2 基于圆点分析法的DH参数初辨识
首先利用圆点分析法初步辨识该装置的DH模型参数,具体步骤如下。
① 将工业机器人各轴归至零位,再将主动式靶标装置安装在机器人的末端法兰盘上,并控制主动式靶标装置的微型直流伺服电机使该装置处于零位状态。
② 分别单独旋转3个微型直流伺服电机,激光跟踪仪测量靶球的空间轨迹点,再利用最小二乘法拟合得到轨迹圆1的轴线向量、轨迹圆2的轴线向量及轨迹圆3的轴线向量。
③ 将各个轴线向量定义为关节i的关节坐标系Φi(i=1,2,3)的zi轴。Φ4为主动式靶标装置的末端坐标系,其原点是装置零位时的靶标中心,Φ0为装置的基坐标系,如图3所示。基于DH模型的坐标变换步骤,确定从Φi-1坐标系到Φi坐标系的转换矩阵。根据DH模型参数定义,θi为xi-1轴到xi轴的夹角,绕zi-1轴正向为正;ai为zi-1轴到zi轴的距离,沿xi轴正向为正;di为xi-1轴到xi轴的距离,沿zi-1轴正向为正;αi为zi-1轴到zi轴的夹角,绕xi轴正向为正。

图3 基于圆点分析法的主动式靶标装置DH模型辨识
④ 基坐标系Φ0到Φ1的转换矩阵A1无法直接利用圆点分析法获得。但因主动式靶标装置固定安装在工业机器人法兰平面,将工业机器人的默认工具坐标系作为装置的基坐标系Φ0。通过旋转工业机器人关节6,获得轴线向量n6,即工具坐标系ZT轴方向,如图4所示。轨迹圆R6圆心沿轴线n6的反方向平移距离L01得到基坐标系Φ0的原点OT,L01为靶球中心点到装置安装平面的名义距离。工业机器人沿默认工具坐标系X轴方向移动,计算得到Φ0的X轴方向向量,从而建立主动式靶标装置的基坐标系Φ0。
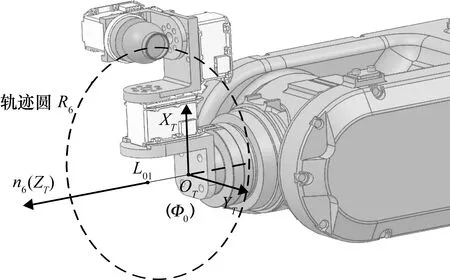
图4 确定主动式靶标装置的基坐标系
根据以上数据计算主动式靶标装置的DH模型,建立其运动学模型。
2.3 基于距离平方误差模型的DH参数精辨识
圆点分析法辨识的DH参数虽符合实际机械构型,但无法拟合其他误差因素引起的定位误差,装置的总体定位精度仍较差。为进一步提高装置的定位精度,利用基于距离平方误差模型法对DH模型进行精辨识。首先建立式(1)所示的位置误差模型。
Δp=KΔη
(1)
式中,Δp为末端位置误差向量;K为相对于基坐标系扩展雅克比矩阵;Δη为几何参数误差。

(2)
(3)

(4)
DH参数的初辨识与精辨识结果如表1所示,精辨识后靶标的DH参数发生了较明显的变化,主要集中在A2与At两个转换矩阵,由图3的实际测量点图像可以看出测量点分布并非十分圆滑,而圆点分析法无法将这些误差考虑进去,精辨识可以更精细地拟合这些误差。

表1 主动式靶标装置的DH参数辨识结果
3 空间点测量误差优化补偿方法
在完成主动式靶标的DH参数标定后,虽能精确获得靶标在其局部坐标系内的实际坐标,但并未将该误差补偿到相应的测量数据中。为实现误差补偿,需要将在工具坐标系中的靶标的位置向量转换到测量坐标系中,并补偿到激光跟踪仪测量点的位置矢量中。

OL=LRB·R·POtcp+PL
(5)
式中,POtcp为机器人工具坐标系下测量点的位置向量;PL为测量坐标系下测量点的位置向量。
所建立运动学模型仍存在一定偏差,主要源于基坐标系偏差,为提高测量精度,添加了基坐标系位置偏差补偿参数p和角度偏差补偿参数q。将式(5)改写为
(6)
(7)
式中,Ai,Bi,Ci为在第i个关节点机器人示教器中获取的ZYZ欧拉角;q1,q2,q3分别为q向量的分量。
将工业机器人在零位状态时旋转关节6,测量靶标的轨迹点及并记录对应的位姿角度A,B,C带入式(6)和式(7),求解ε最小时的p和q,将辨识后的参数按照式(6)和式(7)的方式进行补偿,便可计算得到测量点的精确空间坐标值。
4 测试实验及讨论
搭建了图5所示的实验测量系统,从工业机器人的关节测量范围和测量精度两个方面验证所设计的主动式靶标装置的功能。

图5 主动式靶标装置的实验测量系统
首先,以工业机器人基于圆点分析法的几何参数标定技术为基础,对比被动式靶标与主动式靶标的测量范围。将激光跟踪仪固定在距离工业机器人约2 m的位置,分别单独转动工业机器人的6个旋转轴,每次旋转均从该旋转轴的一个极限位置旋转至另一个极限位置,分别使用被动式靶标与主动式靶标装置进行测量。记录靶球从进入激光跟踪仪的测量范围到脱离激光跟踪仪测量范围之间的旋转角度,实验结果如表2所示。数据表明该装置能够有效地扩大机器人标定过程中的测量范围。依据文献[7]中所述,较大的测量范围能够有效地提高参数的辨识精度。

表2 主动式/被动式靶标的关节角度测量范围对比
其次,为验证所提出的测量装置及方法的测量精度,在工业机器人的工作空间内随机选择1个非零位的位姿点,单独旋转关节6并调节主动式靶标装置使激光跟踪仪始终能测量靶标。控制工业机器人关节6以10°步长旋转,激光跟踪仪测量轨迹点,并记录机器人示教器的姿态参数以及主动式靶标装置的角度参数。工业机器人关节6的旋转并不改变机器人默认工具坐标系的原点位置,因此理论上经过误差补偿的测量点均应等于该位姿的工具坐标系原点的坐标。由于无法获得工具坐标系原点的实际位置,通过所有测量点转换过后的密集程度来体现测量精度的好坏,评价函数如式(8)。因工业机器人关节6的轴线存在一定的同轴度误差,因此利用T-mac靶标进行相同的实验做参照。
(8)


图6 测量精度的验证结果
综上所述,所设计的主动式靶标装置结合所提出的精度优化算法,能够保证测量精度在0.0507 mm。同时基坐标系与测量坐标系存在一定的转换误差,也将影响测量精度,但应用于基于原点分析法的工业机器人几何参数标定时,目前的测量精度能够满足测量需求。
5 结束语
为解决工业机器人标定精度受限于被动式靶标的激光光线接收角度范围,设计并提出了一种主动式靶标装置及优化补偿方法。该方法首先利用圆点分析法初步辨识主动式靶标装置的DH参数,其次基于距离平方误差模型法对该装置进行DH参数的精辨识,最后基于坐标系转换将主动式靶标装置的位置向量补偿到激光跟踪仪测量点的位置向量。实验结果表明,所设计的主动式靶标装置能够有效地扩大工业机器人关节的测量范围。其次验证了所提出的精度优化方法能够将该装置的测量误差降低93.31%,实际定位精度达到0.0507 mm,能够满足工业机器人几何参数标定的精度要求。
