基于力反馈的手功能康复训练系统设计
2019-09-12
(东南大学 仪器科学与工程学院,江苏 南京 210096)
近年来,我国因脑卒中造成的偏瘫患者数量逐渐增多,医学原理和临床医学证明,科学的康复训练对于偏瘫患者受损伤肢体运动功能的恢复有重要作用[1]。康复训练系统是一种集合了康复医学、机器人学、信息科学、计算机科学等多学科知识的康复医疗设备,以现代康复医学理论为基础,借助机器人辅助患者进行康复训练来替代康复医师对患者一对一的训练,从而提高治疗效率和降低成本[2]。机器人具有许多人类所无法比拟的优点,例如,长期、稳定地重复训练,精确、客观地观测训练与运动参数,提供实时的反馈、远程训练等[3]。康复机器人的应用有助于医生更有针对性地依据患者的康复情况制定康复训练方案,加快患者的康复进程[4]。
目前,针对上肢、下肢的康复医疗机器人已经开始在临床广泛使用,且效果显著,但针对手指的康复机器装置却很少,其主要原因是人体手指的运动模式较为复杂[5],自由度高且手指易受损伤。针对以上问题,本文设计了一种基于磁流变液的力反馈手功能康复训练装置,满足手指康复训练的要求。系统设计过程中,保证系统的安全性和稳定性是最基本的原则[6]。通过实验验证,本系统设计合理,具有可行性和可靠性,能有效帮助偏瘫患者实现受损手部功能的恢复。
1 手指康复训练系统构成
手指康复训练系统的整体组成如图1所示,上位机软件通过USB通信向下位机ARM芯片发送特定格式的指令进而控制机构带动患者手指做康复训练,同时,上位机显示并存储患者手指运动位置、压力等信息作为评估患者康复阶段的依据。

图1 手指康复训练系统构成
在使用过程中,康复训练装置同时具有主、被动训练模式,被动训练由直流电机带动手指进行运动,主动训练时,患者手指主动施力,由磁流变液阻尼器提供相应的力反馈。在训练过程中,通过编码器、力矩传感器等采集患者手指运动过程中的运动范围、力等信息,帮助医生评估患者手指的康复阶段,同时为了避免训练装置对手指造成二次损伤,采用了有源/无源混合的力反馈交互驱动装置对康复训练机构进行稳定、精准地控制。
下面主要对康复训练系统的机构和控制方法做介绍。
2 康复训练系统机构设计
根据人体手指的生理结构特征,如图2所示,人体手指的各种动作主要是依靠肌肉带动指骨,进而改变关节之间的位置实现的,其中,拇指的动作主要与腕掌关节(CM),掌指关节(MP),指间关节(IP)有关,除拇指之外的其余四指结构相似,主要由掌指关节(MP)、近端指关节(PIP)、远端指关节(PIP)决定其运动[7],由此,设计如图3所示的手功能康复训练机构。机构主要由手指训练机构和驱动传感装置两部分组成,手指训练结构分为拇指训练结构和食指训练机构,驱动传感装置包括光电编码器,直流电机、磁流变液阻尼器和力矩传感器。如图3,拇指训练机构由两组驱动传感装置控制,分别帮助拇指完成弯曲/伸直运动和外展/内收的运动;食指训练机构由一组驱动传感装置控制,实现食指的弯曲/伸直运动。下面分别对食指、拇指训练机构进行介绍。
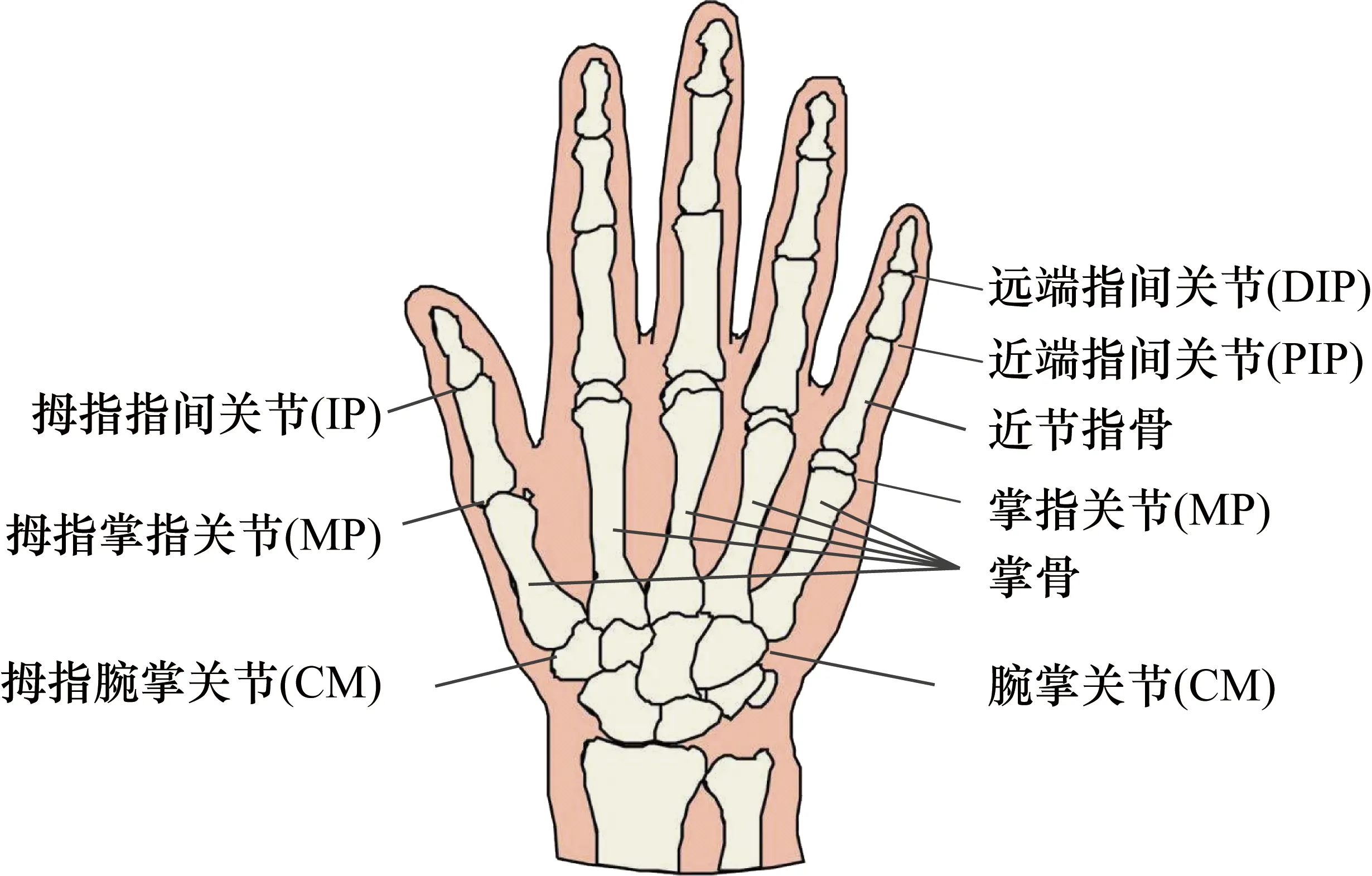
图2 人体手指生理结构

图3 手指康复训练系统机构
2.1 食指训练机构
根据食指的结构和运动特点,设计如图4(a)所示的机构辅助食指实现平面内的弯曲/伸直运动,整体采用连杆机构,由4个连杆、2个指套和1个固定座组成,其中驱动杆连接驱动轴,带动整个机构运动。在机构中,由于后端指套在前后连接杆上运动的行程很短,因此在前后连接杆上设置了光滑导槽,后端指套在导槽中作短距离滑动,在前、后指套分别安装尼龙贴用于固定手指。当患者使用时,机构在一组驱动传感装置的控制下,带动食指完成掌指关节(MP)和近端指间关节(PIP)的弯曲/伸直运动。如图4(b)为食指使用机构时的示意图,此外,由于相似的生理结构和动作,此机构同样适用于中指,无名指的康复训练。
2.2 拇指训练机构
人手的拇指和其他4个手指在生理结构上有所不同,在于拇指只有一个指间关节(IP),但是腕掌关节(CM)的运动更加灵活,可以配合其他手指完成拿、捏等动作,因此拇指训练机构的设计不同于其他手指。考虑到拇指指间关节活动范围小,本设计中拇指训练机构只提供掌指关节(MP)的弯曲/伸直运动和腕掌关节的外展/内收运动,其中腕掌关节的外展/内收的动作在日常生活中的使用尤为频繁,可以想象此动作轨迹类似与顶点位于手腕处的圆锥面,因此设计如图5(a)所示的拇指运动机构,采用两组驱动传感装置分别实现两种运动。其中,驱动T1带动拇指训练机构在两块挡板之间实现弯曲/伸直运动,驱动T2与T1相配合带动拇指顶部做圆锥运动,从而实现外展/内收的动作。考虑到拇指关节不能旋转,因此在做外展/内收运动时需要一个辅助的万向节机构,如图5所示。

图4 食指训练机构

图5 拇指训练机构
3 控制系统设计
3.1 控制电路总体结构设计
康复训练系统下位机控制电路采用模块化设计,包括主控制器模块、通信模块、驱动控制模块、传感器数据采集模块和电源管理模块,如图6所示。其中,主控制器模块使用CORTEX-M3内核的LPC1700系列ARM芯片,该芯片具有丰富的外设接口,满足康复训练系统的需要。
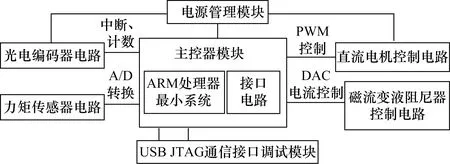
图6 下位机控制电路
3.2 驱动传感装置选型及设计
3.2.1 力矩传感器
为了使下位机控制系统能够实时采集到患者使用康复训练装置时手指受力信息,本系统采用SY-8414-D型电阻应变式静态扭矩传感器测量输出轴力矩,其参数如表1所示,传感器信号通过SY-BSQ-3型的变送器,转换为0~5 V的标准电压通过A/D转换输入到ARM芯片进行处理。由采集到的力矩信息和机构尺寸信息,计算得到患者使用过程中的手指受力。

表1 力矩传感器参数
3.2.2 光电编码器
手指康复训练系统使用型号为E40S6的增量式光电编码器,根据旋转方向对编码器转轴转动时输出的脉冲信号进行计数,检测患者使用过程中手指的位置和手指运动的速度等信息。
3.2.3 磁流变液阻尼器
本系统使用圆盘式磁流变液阻尼器作为力反馈执行装置的无源执行器,在患者主动施加力时,产生相应的阻力。其结构图和实物图如图7所示。阻尼器主要由转子(旋转盘)、定子(固定盘)、绝磁环、线圈、轴、密封圈和外壳等部分组成。其中,线圈紧绕在绝磁环上,壳体内充满了磁流变液,在轴孔处和壳体的密封处各设有密封圈以防止磁流变液漏出,壳体、线圈、转子以及各部分间隙内的磁流变液共同组成了一个磁路[8]。壳体中充满的磁流变液由易磁化微粒、载液和稳定剂组成,线圈不通电时,壳体内没有磁场,磁流变液呈现牛顿流体状态,当线圈通电时,随着电流的增大,壳体内磁场增强,液体的粘度也会随之增大并最终失去流动性变为固态,在此过程中阻尼器的输出力矩也会逐渐变大,因此可以通过控制流入磁流变液阻尼器中线圈的电流大小调节其输出力矩,从而在患者使用时,能够产生相应的力反馈。

图7 磁流变液阻尼器装配图与实物图
3.2.4 直流电机
在进行手指训练时,需要主动型驱动执行器来牵引手指机构的运动,主要考虑以下几个因素:① 能够长时间工作在低速或者是堵转的状态下;② 能够提供满足条件的转矩,且易于控制、稳定性好;③ 安全可靠且使用寿命长。
根据以上要求,本设计选用的是LYX系列55LYX04稀土永磁直流力矩电机,电机相关参数如表2所示,它可以长时间工作在低转速甚至是堵转的状态下,不需要经过齿轮减速而直接带动负载,并且能提供足够大的扭矩。

表2 直流电机参数
3.3 康复训练模式
本康复训练装置采用有源/无源混合的力反馈交互驱动装置,将电机与磁流变液阻尼器相结合,康复训练系统主要有两种训练模式,被动训练模式和主动训练模式。在被动模式下,直流电机作为有源执行器,当电机带动手指进行运动时,由于电机的超调特性,在接近目标位置时,使用磁流变液阻尼器辅助其停止,使患者在使用过程中手指的运动更加稳定、安全[9]。同时利用光电编码器和力矩传感器实时测量机构运动速度和患者手指受力情况,防止患者手指由于运动速度过快造成损伤。被动训练设置控制流程图如图8所示。
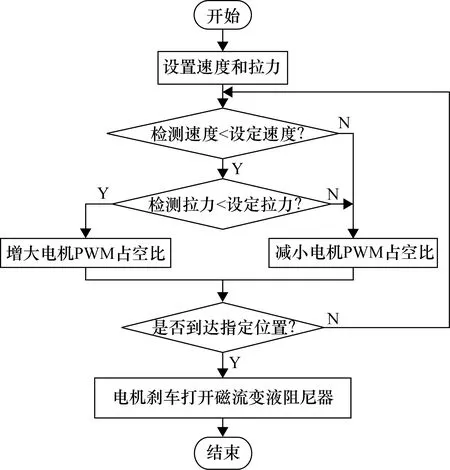
图8 被动训练控制流程图
在主动训练中,上位机通过与下位机ARM通信,控制流入磁流变液阻尼器电流大小,完成对阻力的设置。患者手指抵抗阻力在一定范围内做相应的训练动作,为了提高患者训练积极性,在主动模式下,设计不同的小游戏用于提高患者的使用体验。相应的主动训练模式流程图如图9所示。两种训练模式相互结合,有助于患者更加科学、有效地完成康复疗程。
4 实验
为了测试手功能康复训练系统的有效性,在完成系统调试后,进行了实验验证,通过光电编码器记录在被动训练一个周期内手指运动机构的转动角速度,并用力矩传感器记录主动模式下手指往返一周期的受力信息,以食指为例,其曲线图分别如图10(a)、图10(b)所示。从图中可以看出,在进行被动训练时,手指训练机构的转动速度曲线平滑,患者手指受力。由此可见,加入了磁流变液阻尼器的主被动混合力反馈交互驱动装置,不仅使得运动更加平稳,更大大提高了系统的安全性,在主动训练中,通过对流入磁流变液阻尼器电流的控制,使得患者可以感受到稳定的力反馈。

图9 被动训练控制流程图

图10 手指运动机构的转动角速度
在进行连续被动训练实验时,对食指训练机构的驱动轴转动角度与人手关节转动角度进行了测量与分析,如图11所示。从图中可以看出,食指驱动轴在0~90°范围转动时,掌指关节和近端指间关节活动范围可分别达到0~87°和0~108°。

图11 被动训练食指关节转动角度
在进行拇指被动训练时,通过测量驱动轴T1、T2转动角度,得到拇指的掌指关节活动范围为0~76°,腕掌关节活动范围为0~83°,满足了手指关节转动的需要。
在保证系统的可靠性与稳定性的基础上,本项目以一名偏瘫患者为实验对象,对系统的有效性进行相关的实验研究。该患者手指不能进行主动的运动且手指关节呈现僵硬、挛缩等症状,按照临床上康复训练的强度,本次实验为期15 d,每天上、下午让患者使用本系统进行45 min的被动训练,如图12所示;记录患者每天食指、拇指所能承受的最大运动范围,实验数据如图13所示。可见患者在使用本系统进行训练后,手指关节的运动范围呈现明显增大趋势,说明本系统能够有效地帮助患者恢复手指运动功能。

图12 偏瘫患者进行康复训练
5 结论
本文设计了一种基于力反馈的用于偏瘫患者手功能康复的训练系统。详细描述了康复训练系统的组成,并对设计的训练机构进行运动学分析。为了实现训练过程的稳定性和安全性,采用了主被动混合力反馈交互驱动的控制方法。对系统进行了实验验证,结果表明设计的手功能康复训练系统具有可行性和可靠性。

图13 偏瘫患者手指关节运动范围
