浅谈塑料离合踏板臂使用Tetrahedron有限元网格的后处理
2019-09-10谢文辉
谢文辉
摘 要:汽车轻量化为节能减排作出了巨大贡献,而“以塑代钢”是轻量化中很常用的途径。有限元分析作为“以塑代钢”中一个非常重要的评估工具,约束其分析准确性的因素除了材料参数的定义、有限元分析模型的建立之外,还有有限单元网格的选择。对于壁厚不均匀的塑料离合踏板臂,使用Tetrahedron网格类型进行有限元分析,后处理时最大节点应力以及此网格单元的最大积分点应力也会有差异。结果显示,网格密度、积分点数量的变化对积分点应力的变化相对更小。
关键词:塑料离合踏板臂;Tetrahedron网格;节点应力;积分点应力
1 概述
在汽车轻量化中,塑料离合踏板臂是“以塑代钢”非常典型的案例,在部分合资原始设备制造商(Original Equipment Manufacture,OEM)中得到了平台化的应用,而以吉利、长城等为代表的自主品牌,也在积极导入。对于整个踏板模块而言,其发展轨迹为全金属方案—混合型方案—全塑料方案。
离合踏板臂从金属换成塑料方案后,由于其高分子材料本质,以及注塑成型缺陷的影响,以下几点技术要求需要特别关注:满足人机工程学(翘曲变形)、确保满足长期工况(强度)、确保满足长期使用稳定性(疲劳耐久)、高低温环境下正常使用(高低温循环)、良好的耐腐蚀性。
在满足空间要求的前提下进行踏板臂纵向强度实验项评估时,有限元软件里面除了材料参数定义、有限元模型的建立对仿真结果有很大影响之外,如何选择网格类型、如何利用后处理进行评估也是非常重要的。本文使用了Tetrahedron网格分析,探究后处理结果中节点应力和积分点应力的区别,为CAE工程师提供参考。
2 产品描述
2.1 结构描述
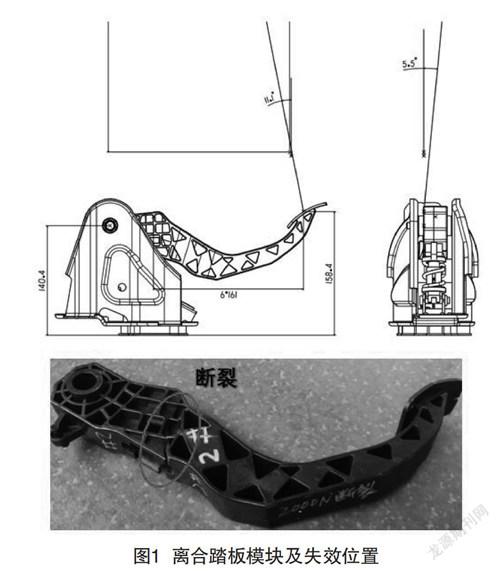
图1为一个离合踏板模块实例,主要零件包括塑料离合踏板臂与组成离合踏板支架的钣金件,以及连接两者的螺栓、踏板臂的复位弹簧[1]。
塑料离合踏板臂为注塑成型生产零件,而零件壁厚是不均匀设计的。假如在Moldflow中进行模流分析其密度,可以看到:芯层厚度高的区域注塑结束后密度较低,现实体现为芯层有缩孔缺陷。为降低注塑成型缺陷对零件性能的影响,注塑过程需要保证“产品密度高”,注塑工艺上体现为高背压、高保压压力和长保压时间等,利用优化的注塑成型工艺来避免产品因注塑成型缺陷而导致性能不足。
2.2 工况描述
为确保满足长期使用工况,OEM会通过踏板臂纵向强度实验来评估其强度。每个OEM根据其平台设计指标的不同,设定的载荷大小也不一样。对此案例讨论的离合踏板模块,加载位置选定踏板臂表面几何中心、垂直于踏板臂表面加载。踏板模块主要靠踏板支架底座与BIW进行连接,踏板臂通过限位杆限制踏板臂的运动角度、弹簧进行复位[2]。
在此实验条件下,在载荷达到2 000 N时,踏板臂会在图1所示位置发生断裂失效。
3 有限元仿真
3.1 网格选择
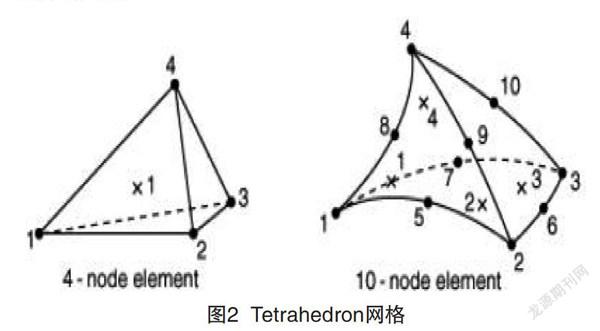
有限元仿真的网格选择,很大程度上受到零件结构的影响。由于塑料踏板臂整体壁厚不均匀,同时考虑到网格生成的可能性以及仿真时间成本,选择如图2所示的Tetrahedron网格[3],采用C3D4以及C3D10M两种积分点形式作为对比。
网格密度则选择使用单元尺寸为1.5 mm、2.3 mm和3.0 mm来进行对比。结合积分点数量和网格密度两个变量,进行6组有限元仿真分析。
3.2 建模说明
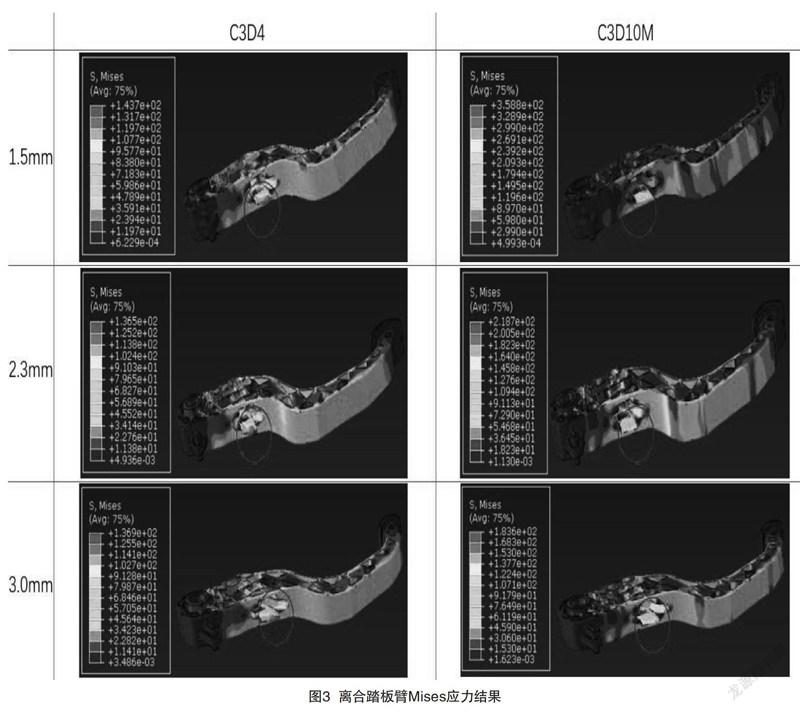
参考离合踏板臂实际实验情况,对离合踏板臂表面施加2 000 N载荷,而踏板支架底座与BIW连接处需约束6自由度,如图3所示;另外,需保证踏板臂模型已转动到其实际工作的极限角度,且限位槽处约束Z方向的自由度。以上工作全在Abaqus中进行。
材料使用40份玻纤增强的PA66,输入其在平衡时态时测定的真实Stress-Strain曲线;组成踏板臂支架的其余钣金零件可以使用标准的金属材料进行定义,如弹性模量2.10e+11 N/m2、泊松比0.30、密度7.85e+3 kg/m3。
保证材料、边界条件完成之后,使用Static,General的求解器,离合踏板模块零件之间使用0.3摩擦系数进行接触對的建立后,进行仿真分析[4]。
3.3 结果处理
如图3所示,无论用哪一种网格类型、网格密度,产品应力最大点位置与现实断裂位置相符合,不同的地方在于应力值的大小。
众所周知,Mises应力在云图显示结果为最大节点应力。在这里选取一个云图结果中Mises应力最大的网格进行Probe values查询,可以发现,云图上所显示结果其实为节点应力,而用Probe values去查询的结果为积分点应力。一般来说,有多少个积分点,就会有多少个积分点应力,最大的结果可以称为最大积分点应力。
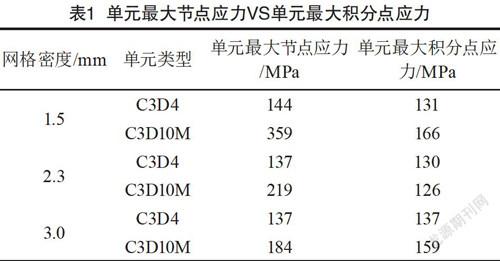
这时,查询上述6个模型的云图结果断裂(最大节点应力)位置网格的积分点应力,从表1可以发现,最大节点应力是随着积分点数量的增加而大幅度增加,但随着网格密度的增加却没呈现出明显变化规律;最大积分点应力随着积分点数量的增加没有呈现出明显变化规律,而随着网格密度的增加,最大积分点应力也没呈现出明显变化规律。
4 结语
此案例讨论的塑料离合踏板臂,由于采用不均匀壁厚进行结构设计,考虑到网格划分的难度以及成本,选择Tetrahedron进行网格划分可以大大节约设计开发成本。但在结果后处理时,CAE工程师可能会对该如何评判Mises应力结果产生疑惑。
通过此案例可以得知:(1)Mises应力结果在云图上显示,默认为节点应力值,而最大节点应力值的变化与网格积分点数目成明显的正比关系,而随着网格密度的增加却没有很大的变化。(2)对最大节点应力单元进行查询,最大积分点应力值与网格划分密度、网格积分点数目都没有明显的关联。
[参考文献]
[1]徐石安,江发潮.离合器设计[M].北京:清华大学出版社,2005.
[2]黄从奎,杨允辉,喻少高.扭转弹簧在助力式离合踏板中的应用[J].汽车实用技术,2015(12):108-111.
[3]HIBBITT,KARLSSON,SORENSEN,et al.ABAQUS/standard user’s manual version 6.14[M].北京:机械工业出版社,2014.
[4]马 成,汪 江,李光明.离合踏板力优化设计[J].农业装备与车辆工程,2015,53(4):71-73.
