高清视频图像跟踪器硬件设计
2019-09-10张金涛张宏飞裴文浩
张金涛 张宏飞 裴文浩
关键词:跟踪器;图像采集;DSP;FPGA
中图分类号:TP391.41 文献标识码:A 文章编号:2096-4706(2019)06-0042-03
Keywords:tracker;image acquisition;DSP;FPGA
0 引 言
隨着电子技术的发展,图像处理技术在生活和工业中应用得越来越广泛[1]。在图像处理技术中,目标识别与跟踪技术一直是众多学者研究的热点,目前跟踪技术的实现主要采用图像跟踪器,其主要实现的功能是采集视频图像,通过跟踪算法对目标进行跟踪定位。早起的可见光摄像机输出主要采用PAI制式模拟视频为主,其分辨率可达到720×576(像素)。由于传感器技术的不断发展,以Camera Link为接口的摄像机得到了广泛的应用,视频分辨率大大提高。分辨率的提高有利于场景侦查,而且对于视频图像跟踪器来说,更有利于目标跟踪和定位。但随着视频图像分辨率的提高,直接导致跟踪算法运算量加大,无法满足系统实时性的需要[2]。本文图像跟踪器设计结构由单片FPGA与两片DSP组合而成,具有可靠性高、成本低的优势。两片DSP可以对数据进行并行处理,大大提高了计算效率,达到系统实时性的要求,更有利于系统完成目标跟踪、透雾算法等技术的扩展。同时,每片芯片都包含多个高速串行串口,可以对数据进行快速输入输出操作,而且为日后系统升级提供便利,更好地适应未来高实时性跟踪和多目标跟踪算法的研究。
1 图像跟踪器硬件的总体设计
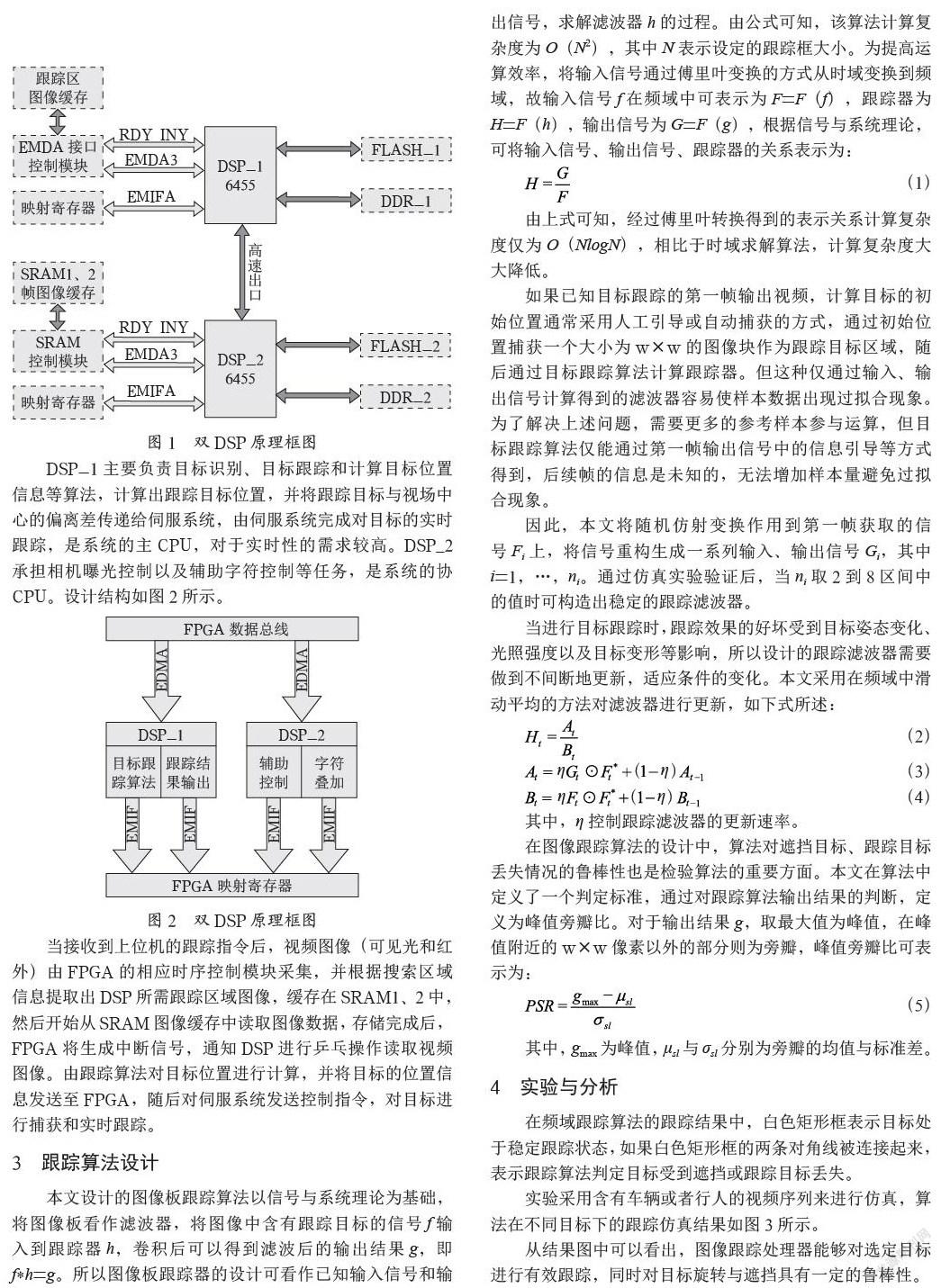
图像跟踪器接收的信号主要由前端可见光摄像机采集到的视频信号,经过模数转换后传入FPGA中,对其进行信号处理。图像跟踪器电路采用双DSP策略,图像跟踪器接收到上位机的指令后,一片DSP主要承担相机曝光控制以及辅助字符控制等任务,另一片DSP主要负责目标识别、目标跟踪和计算目标位置信息等算法,计算出跟踪目标位置,并将跟踪目标与视场中心的偏离差传递给伺服系统,由伺服系统完成对目标的实时跟踪。最后由图像跟踪器将处理后的视频图像通过视频编码将信号传输至视频监视器,完成最终成像。
2 跟踪器模块设置
本文设计的图像跟踪器采用FPGA与DSP共同实现跟踪功能的设计路线,通过两片TI公司生产的TMS320C6455(以下简称C6455)系列DSP和Altera公司生产的Cyclone系列FPGA芯片,由单板完成图像跟踪器的所有功能。C6455是TI公司目前研发的C6000系列中数据处理能力最强的一款芯片,芯片主频为1.2GHz,计算峰值可以达到9600MIPS。C6455主要拥有数据储存量大、计算能力强和可扩展性高等技术优势,可以出色地完成该跟踪器的目标跟踪算法[3]。
本文设计的硬件结构图如图1所示,由一片FPGA和两片DPS芯片组成。两片DSP为对称结构,每片分别包含2组DDR2存储芯片,内存大小为256MB,同时带有两片Flash ROM。DSP与FPGA之间由EMIF口相连,完成数据输入输出,各DSP之间的通讯方式由高速串口完成。
3 跟踪算法设计
4 实验与分析
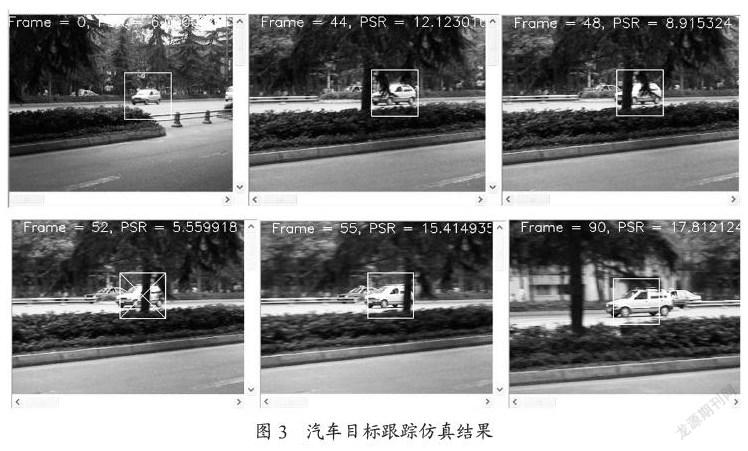
在频域跟踪算法的跟踪结果中,白色矩形框表示目标处于稳定跟踪状态,如果白色矩形框的两条对角线被连接起来,表示跟踪算法判定目标受到遮挡或跟踪目标丢失。
实验采用含有车辆或者行人的视频序列来进行仿真,算法在不同目标下的跟踪仿真结果如图3所示。
从结果图中可以看出,图像跟踪处理器能够对选定目标进行有效跟踪,同时对目标旋转与遮挡具有一定的鲁棒性。
5 结 论
实验表明,本文设计的采用FPGA与DSP为核心架构的图像跟踪器能够解决处理高清图像时数据量大的问题,同时可以实现对目标的实时跟踪,在遇到目标遮挡和旋转的情况下,具有一定鲁棒性。
参考文献:
[1] 邹春勇,尚海林.基于CameraLink接口高清图像跟踪器设计 [J].科学技术与工程,2012,12(19):4672-4675.
[2] 王洪迅,赵天云,毕笃彦,等.高速侦察图像数据的获取和缓冲 [J].微电子学与计算机,2004(10):82-85.
[3] 李方慧.TMS320C6000系列DSPs原理与应用 [M].北京:电子工业出版社,2003.
作者简介:张金涛(1980-),男,汉族,山东菏泽人,工程师,学士,研究方向:直升机航电。