欧拉角和等效轴角参数表示下机械腕的轨迹规划和奇异性分析
2019-09-10王玉花姜庆昌野秀玉刘新柱
王玉花 姜庆昌 野秀玉 刘新柱


摘 要:为了解决机械腕的控制问题,研究了由欧拉角和等效轴角参数表示的数学奇点。通过计算角速度和角加速度,研究机械腕的奇异位形,并根据它们之间的关系,设计了三种轨迹规划方案,以保证机械腕运动的连续性和稳定性,以及机械腕姿态的优雅性和简洁性,实现实时控制。
关键词:欧拉角;奇异性;轨迹规划
中图分类号:O152.5
文献标识码: A
随着科学技术的进步,机器人技术有了巨大的发展。机器人操作手是由一系列连杆和相应运动组成,要实现复杂的运动,完成规定的操作,研究机械腕的运动规律必不可少[1]。在笛卡尔坐标系中,机械腕的空间描述可以用位置矢量和姿态矩阵来表示[2]。在本文中,我们分析了欧拉角和等效轴角参数表示下的机械腕的奇异位形,利用得到的数学关系式,给出了适用于不同条件下的关节运动控制方案,从而实现机械腕简单的操作控制。
1 位姿矩阵
刚体相对于固定坐标系的定向描述是运动学的主要研究内容。在笛卡尔坐标系中,围绕腕点旋转的机械腕的定向可用固定坐标系和机械腕的运动坐标系之间的旋转矩阵表示[3],而这个旋转矩阵来自于三维欧氏空间的正交群SO(3),作为一个三维流形,SO(3)称为R3上的旋转群。
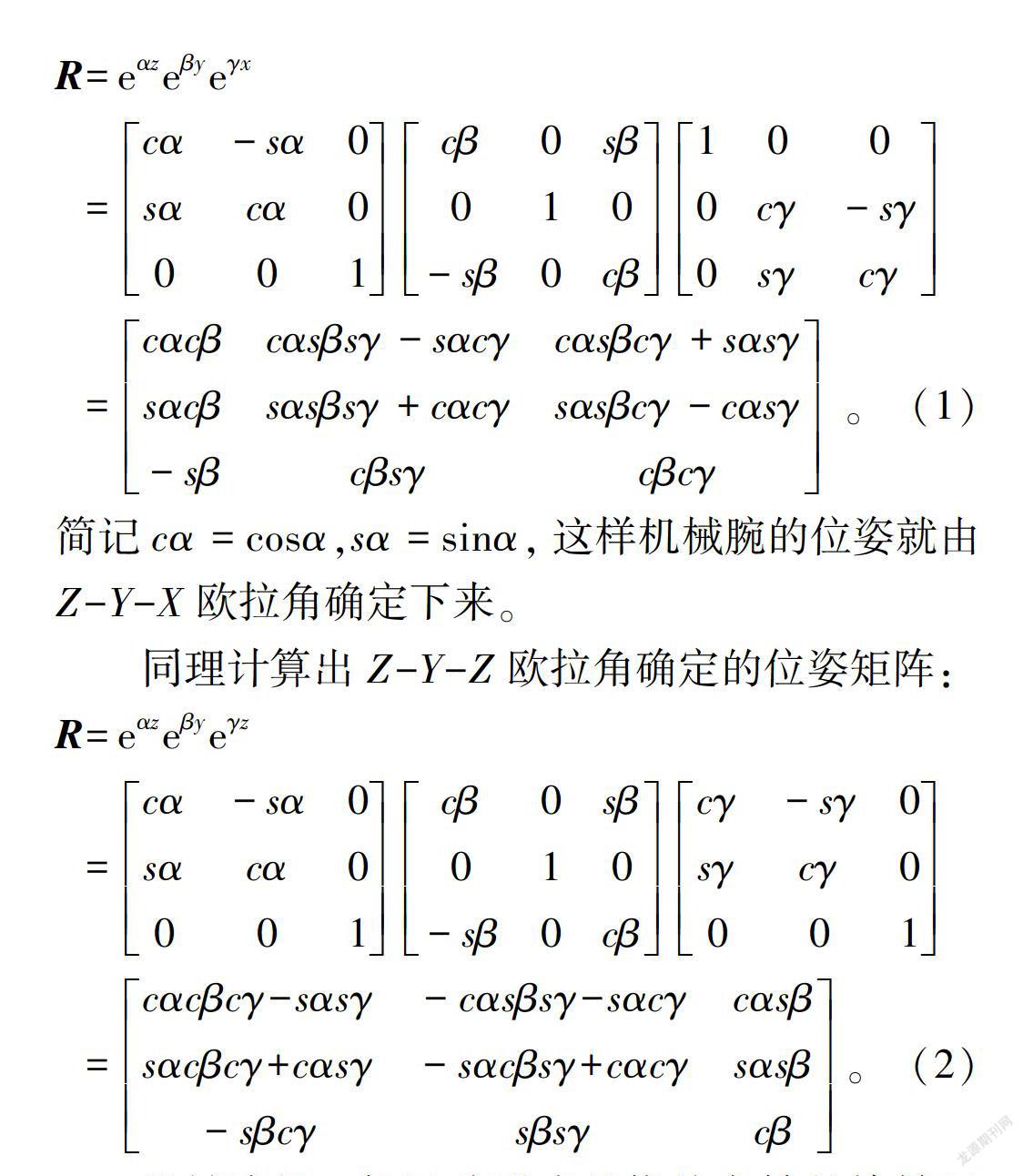
描述物体空间位姿通常用欧拉角进行定义。设机械腕的运动坐标系与固定坐标系重合, 运动坐标系与Z轴,Y轴,X轴的欧拉角分别为α,β,γ,通过正运动学分析,给定关节角向量(α,β,γ)T,可计算出机械腕的位姿矩阵为
(1)
简记cα=cosα,sα=sinα,这样机械腕的位姿就由Z-Y-X欧拉角确定下来。
同理计算出Z-Y-Z欧拉角确定的位姿矩阵:
R=
eαzeβyeγz
=cα-sα0sαcα0001cβ0sβ010-sβ0cβcγ-sγ0sγcγ0001
=cαcβcγ-sαsγ-cαsβsγ-sαcγcαsβsαcβcγ+cαsγ-sαcβsγ+cαcγsαsβ-sβcγsβsγcβ。(2)
机械腕的一般运动形式是绕给定轴的旋转运动,可以通过旋转变换求出其等效轴角,用等效轴角坐标系表示姿态的变换。设ω=(ω1,ω2,ω3)T∈R3表示旋转轴方向的单位向量,θ∈R为旋转角度,如果刚体以单位角速度绕ω轴旋转θ角,则等效轴角坐标系下的位姿矩阵为
R=eω⌒θ
=I+ω⌒sθ+ω⌒2(1-cθ)
=ω21(1-cθ)+cθω1ω2(1-cθ)-ω3sθω1ω3(1-cθ)+ω2sθω1ω2(1-cθ)+ω3sθω22(1-cθ)+cθω2ω3(1-cθ)-ω1sθω1ω3(1-cθ)-ω2sθω2ω3(1-cθ)+ω1sθω23(1-cθ)+cθ,
(3)
其中ω⌒=0-ω3ω2ω30-ω1-ω2ω10稱为角速度矩阵,是反对称阵,为三维旋转群SO(3)的李代数。
2 奇异性分析
根据逆运动学分析,由(2)式和刚体最终的运动姿态矩阵R=rij3×3,可以计算出相应的关节角度向量。反解(2)式求得逆运动学方程为
β=atan2(r312+r322,r33),
α=atan2(r23sβ,r13sβ),
γ=atan2(r32sβ,-r31sβ)。
由姿态空间的拓扑结构可知,空间刚体姿态的奇异性是不可避免的。如果sβ≠0, 根据逆运动学方程可获得(α,β,γ) 和(α+π,-β,γ+π)两组解。 但当β=0时,仅可求得α+γ的值,当β=π时,可求得α-γ的值。即当sβ=0时,只能推出α±γ的值,不能确定α,β,γ的值。也就是说,欧拉角参数表示下的运动姿态存在奇异位形,机械腕的运动性能无法保证,此时的奇异位形被称为SO(3)的二维子流形。
此外根据(3)式可得:
cθ=(r11+r22+r33-1)/2,(4)
ω=(ω1,ω2,ω3)T
=12sθ(r32-r23,r13-r31,r21-r12)T。(5)
从(4),(5)式看出,(ω,θ) 和(-ω,-θ)对应的位姿矩阵R=rij3×3是相同的,此时控制系统必须在两种解决方案中进行选择,等效轴参数表示的运动姿态也存在奇异位形。并且当θ趋于0或π时,旋转轴ω变得不明确,奇异现象更为严重,需要进一步研究。
因为位姿矩阵R是正交矩阵,满足RRT=I3×3。求导得:R·RT+R·RT=03×3 ,
即R·RT+(R·RT)T=03×3,令ω^=R·RT,表示刚体瞬间的角速度矢量矩阵。
由(2)式计算,可得
·cαβ·+sαsβγ·α+cβγ·0sαβ·-cαsβγ·-cαβ·-sαsβγ·-sαβ·+cαsβγ·0。(6)
(6)式给出了关节空间中欧拉角速度矢量与笛卡尔空间中腕部角速度矢量的关系,其对应的矢量形式为
ω= ω1ω2ω3=0-sαcαsβ0cαsαsβ10cβα·β·γ·。 (7)
记J=0-sαcαsβ0cαsαsβ10cβ,称为Z-Y-Z欧拉角参数表示下的雅可比矩阵。易算得J=-sβ,显然当β=0或π时,雅可比矩阵奇异在这些点上,给定机械腕的角速度,无法确定关节角速度,Z-Y-Z型欧拉角参数表示的运动姿态存在一阶运动奇异位形。下面我们对(7)式进一步求导,可得刚体的瞬时空间角加速度
ω·1ω·2ω·3=0-sαcαsβ0cαsαsβ10cβα¨β¨γ¨+
-cα-sαsβcαcβ-sαcαsβsαcβ00-sβα·β·α·γ·β·γ·。(8)
当β=0或π时,需要无限的关节角加速度来产生有限的机械腕角加速度,这样施加在旋转接头上的扭矩将变为无限大。因此在这些点上,存在二阶奇异运动, 角速度和关节加速度的控制将会中断[4]。
此外由(3)式可得
ω^=R·RT=0-ω3θ·ω2θ·ω3θ·0-ω1θ·-ω2θ·ω1θ·0,(9)
ω=(ω1,ω2,ω3)Tθ·。(10)
其中θ·是角速度矢量。显然当θ等于0时,机械腕位形奇异;仅当θ·或θ¨不等于0时,才能保证运动的正常进行。
3 机械腕的轨迹规划
在运动学中,轨迹规划通常在任务空间或关节空间中执行。在工程实践中我们需要预期平滑的轨迹。但是在某种情况下,关节空间中的轨迹不是直线的,这将导致机械腕的定向精度变差,并增加关节控制的复杂性。如果在联合空间中执行轨迹规划,则保持关节平稳运行是可行的,但机械腕在此过程中运行不稳定。以上情况是由SO(3)拓扑结构引起的,它不是简单的连通空间,而是道路连通空间,换句话说,存在一个“奇点”。如果我们要保证在任务空间中准确定位并在关节空间中平稳运行,则不能保证运动的连续性。在这种情况下,运动可以分为以下三种情况。
(1)任务空间中的轨迹规划
如果我们希望机械腕在任务空间中平稳移动,则角速度矢量或角加速度矢量应保持恒定。通过ω=(ω1,ω2,ω3)Tθ·和ω·=(ω1,ω2,ω3)Tθ¨,我们知道θ·或θ¨应该保持不变。对应于(7)和(8)式,可得
0-sαcαsβ0cαsαsβ10cβα¨β¨γ¨+
-cα-sαsβcαcβ-sαcαsβsαcβ00-sβα·β·α·γ·β·γ·=0,(11)
和0-sαcαsβ0cαsαsβ10cβα·β·γ·=0。
(12)
也就是说,关节角速度矢量α·,β·,γ·T和关节角加速度矢量α¨,β¨,γ¨T必须满足等式(11)和(12)。在这种情况下,施加在关节上的扭矩变化时,相应的关节角速度矢量和角加速度矢量必须随之改变,因此控制问题变得复杂。 所以上述方法适用于被动关节,如球形关节。 而对于主动关节,则增加了实时控制的难度。
(2)联合空间中的轨迹规划
机械腕一般设计成主动关节,选择三个欧拉角作为控制参数。如果要求主动关节的运动平稳进行,最佳轨迹规划应在关节空间进行,α·,β·,γ·T 或α¨,β¨,γ¨T必须是恒定的,以确保联合规划是可行的。但从(7)和(8)式可以看出,角速度矢量ω和角加速度矢量ω·易发生变化,所以机械腕的运动不能在空中保持平稳。也就是说,机械腕的旋转轴随时变化,这将导致机械腕运动不稳定和定向准确性更差。
(3)精确定位的轨迹规划
在Z-Y-Z欧拉角参数表示下,假设运动由三個独立的关节连续致动。当前一关节动作结束时,下一动作才可执行。在这种情况下,无论在任务空间还是在关节空间,过渡点的运动都不能平稳地动作,运动虽然定向精度最佳,但其连续性会变差。
4 结论
通过计算姿态矩阵的一阶、二阶运动学方程,得出了关节空间和任务空间之间的角速度和角加速度的关系。
分析了机械腕运动机构的奇异性, 设计了三种轨迹规划方案,分析了各自的优缺点和适应性,为实现机械腕的简单操作控制,提供了理论依据。
参考文献:
[1]LIU G F, LOU Y J, LI Z X. Singularities of parallel manipulators: a geometry treatment[J]. IEEE Transactions on Robotics and Automation, 2002, 19: 579-594.
[2]TCHON K. Singularities of the Euler wrist[J]. Mechanism and Machine Theory, 2002, 35: 505-515.
[3]于靖军,刘辛军,丁希仑,等. 机器人机构学的实现基础[M].北京:机械工业出版社,2008.
[4]赵晓颖,温立书,幺彩莲. 欧拉参数表示下姿态的二阶运动奇异性[J]. 科学技术与工程, 2012, 12(3), 634-637.
Singularity and Trajectory Planning of the Mechanical Wrist in Euler
Angles and Equivalent Axis Angle by Parameters Representation
WANG Yuhua1*,JIANG Qingchang2,YE Xiuyu3,LIU Xinzhu2
(1. College of Science, Jiamusi University, Jiamusi 154007, China;
2. College of Mechanical Engineering, Jiamusi University,Jiamusi 154007, China;
3. Jiamusi No.20 Middle School, Jiamusi 154007, China)
Abstract:
Aiming at the control problem of mechanical wrist, the mathematical singularities expressed by Euler angle and equivalent axial Angle parameters were studied. By calculating the angular velocity and angular acceleration, the singular configuration of the mechanical wrist was studied, and according to the relationship between them, three kinds of trajectory planning schemes were designed to ensure the continuity and stability of the movement of the mechanical wrist, as well as the elegance and conciseness of the posture of the mechanical wrist, so as to realize the real ̄time control.
Key words:
Euler angles; singularity; trajectory planning
作者单位:
(1.佳木斯大学理学院,黑龙江 佳木斯 154007;2.佳木斯大学机械工程学院,黑龙江 佳木斯 154007;3.佳木斯市第二十中学,黑龙江 佳木斯 154007)
