基带交叉极化干扰抵消技术研究
2019-09-10王毅曹素莎
王毅 曹素莎
摘要:随着移动计算设备、多媒体业务等通信业务的迅猛发展,频谱拥挤问题越来越突出。为解决频谱资源短缺,可以采用频率复用技术,其中双極化传输就是一种重要的频率复用技术。对双极化传输过程中产生的交叉极化干扰需要进行干扰抵消。对于快速变化的信道,当前的LMS-XPIC技术无法跟踪信道的变化,提出了跟踪性能更好的NIRLS-XPIC算法,并进行了仿真分析和比较。结果表明,NIRLS-XPIC收敛快,能跟踪信道变化,且比RLS-XPIC计算复杂度低。
关键词:双极化复用;交叉极化干扰抵消;数值迭代;最小二乘法;跟踪性能;误码率
中图分类号:TN911.4文献标志码:A文章编号:1008-1739(2019)18-60-3
0引言
双极化频率复用技术(Co-Channel Dual-Polarization,CCDP)是在同一波道内采用相同的载波同时传输两路正交极化波[1]。频谱宽度不变,使频谱利用率提高1倍,具有很好的应用前景。
由于不均匀大气介质以及地物地貌对电波的散射反射,使得在同频载波上传输的两路正交极化波产生交叉极化干扰[2]。需要在通信系统接收端引入交叉极化干扰抵消器(Cross-polarization Interference Canceller,XPIC)来去除交叉极化干扰。目前对于XPIC的研究主要使用LMS-XPIC算法[3],其性能稳定、实现简单,但收敛速度较慢,跟踪性能不够好,当跟踪性能不足以跟踪信道的快速变化时,会导致抵消器输出比特误码率性能下降,严重时甚至导致抵消器失效。
1原理
交叉极化干扰抵消可在基带、中频或射频进行,本文选择在基带实现。在消除干扰时,既要考虑交叉极化信号对同极化信号的交叉干扰,又要考虑同极化方向的码间干扰,所以XPIC采用均衡和抵消并行的结构[4]。
在进行干扰抵消时,无法事先得到输入信号的统计特性,使用相关的自适应算法对抽头系数等参数进行自动调整,使滤波器获得最好的实现性能。交叉极化干扰抵消的过程是把接收的H路信号经过滤波器之后得到的干扰信号与V路信号相减,再把相减后得到的信号与期望的输出信号相比较来调节滤波器的系数,使得相减得到的信号与期望信号最接近,实现交叉干扰抵消的目的。交叉极化鉴别度XPD是衡量算法优劣的重要指标,即本信号经信道传输后得到的主极化分量与另一信号经信道传输后产生的交叉极化分量之比[5],如式(1)所示。

2.2 NIRLS-XPIC
传统RLS算法对递推更新计算引起的累计舍入误差敏感,而累积误差最小二乘算法在递推更新过程中引入了另一个附加参数———累积误差[7],残余误差被累积到第次递推更新过程中予以消除,从而消除了误差。
根据累积误差RLS算法对递推更新计算引起的舍入误差不敏感的特性,权衡迭代算法的复杂度,可以采用数值迭代方法(Max-CD算法[8])来近似实现矩阵求逆,将近似矩阵求逆运算带来的均衡器抽头加权更新偏差作为累积误差RLS算法的残余误差向量进行消除,保证了算法的收敛性能和跟踪性能。因此,与数值迭代算法结合的累积误差RLS算法性能不会存在大的损失,计算复杂度降低。这种算法就是数值迭代最小二乘(Numerical Iterative Recursive Least Square,NIRLS)算法。
3实验仿真
为了验证NIRLS算法的性能好坏,使用Matlab对LMS-XPIC,RLS-XPIC,NIRLS-XPIC三种算法进行了仿真分析比较,LMS-XPIC步长设置为2.2×10-2,RLS-XPIC和NIRLS遗忘因子设置为=0.98,横向滤波器为11阶。
3.1跟踪性能分析
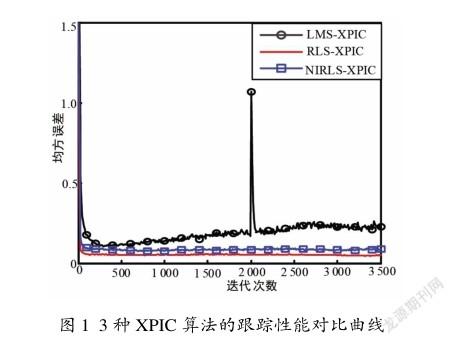
仿真信号采用QPSK,=10 dB,=20 dB,第2 000次迭代时,再次插入训练序列来观察算法跟踪性能可以看出:NIRLS-XPIC, RLS-XPIC收敛后的均方误差一直保持平稳,而LMS-XPIC收敛后的均方误差出现发散现象。基于LMS算法的抵消器每次迭代的过程是找最相邻的点,在有训练序列时误差减小,再次插入训练序列时LMS-XPIC因为跟踪性能差相位发生变化,均方误差还小但误码率已经很高,导致误差曲线出现凸起,需要再进行一次收敛过程,即LMS-XPIC算法跟踪不上信道的变化,而NIRLS-XPIC算法和RLS-XPIC算法均能较好地跟踪信道的变化。
3.2误码率分析
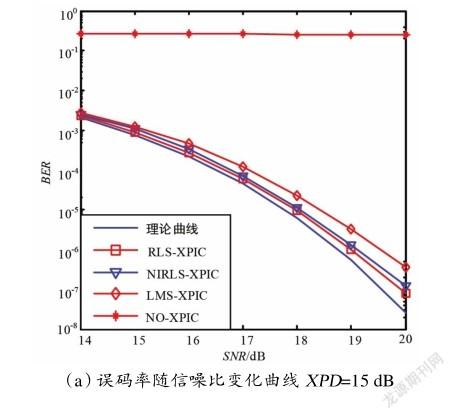
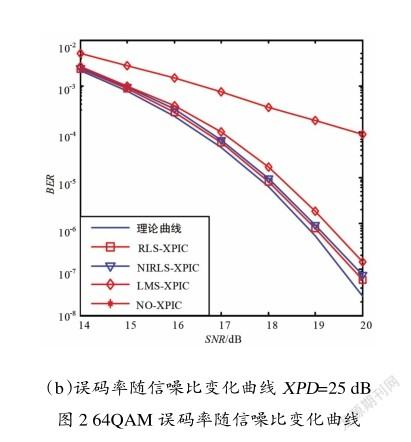
如图2所示,是64QAM下误码率随信噪比变化曲线图,XPD为25, 15 dB。分析BER特性可以看出,XPI对信号误码率有严重影响,有XPIC的接收器明显优于没有XPIC的接收器;干扰越严重(XPD数值越大)抵消效果越明显;与理想抵消相比,实际的XPIC后还残余着一定干扰,当=10-6时,NIRLS-XPIC效果与RLS-XPIC效果相差不大,比LMS-XPIC有约0.3 dB的提升。
3.3交叉极化改善度分析
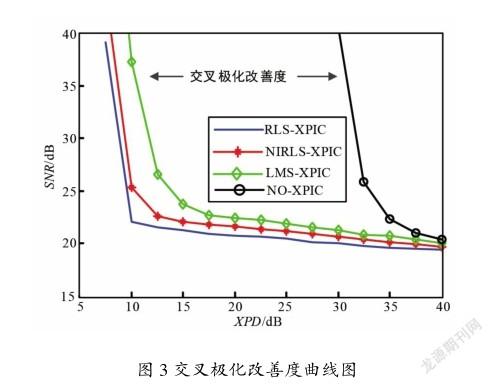
对于干扰抵消的效果好坏,一般是由信号通过XPIC前后的XPD值之差(交叉极化改善度)来作为衡量XPIC性能的指标。图3为采用64QAM测试了=10-6情况下的交叉极化改善度,可以看出,XPD越大,交叉极化干扰对系统的影响越小;基于LMS算法进行XPIC的系统比没有XPIC的系统的XPD改善约为20 dB;基于RLS算法和基于NIRLS算法进行XPIC的系统比没有XPIC的系统的XPD改善约为23 dB,比LMS-XPIC提升了约3 dB,系统性能得到改善。
3.4计算复杂度分析
设横向滤波器阶数为,若以XPIC算法每次抽头加权更新中复数乘法运算的次数表征算法的复杂度,计算可得:LMS-XPIC计算复杂度为2,RLS-XPIC计算复杂度为22+5,NIRLS-XPIC计算复杂度为7。NIRLS-XPIC算法与LMS-XPIC的复杂度都与成线性关系,容易硬件实现,而RLS-XPIC算法计算复杂度与呈平方关系,NIRLS-XPIC抵消算法复杂度高于LMS-XPIC算法,但远远低于传统的RLS算法。与LMS-XPIC算法相比,NIRLS-XPIC算法增加了一定的计算复杂度,但得到了更好的收敛性能和跟踪性能。
4结束语
利用CCDP+XPIC技术,一路信号工作在垂直极化,另一路信号工作在水平极化,XPIC有效地消除了交叉极化干扰。在有效降低了计算复杂度基础上,与传统的LMS-XPIC算法相比,NIRLS-XPIC收敛快速、收敛后误差小、跟踪性能好、交叉极化改善度高,使用NIRLS算法的交叉极化干扰抵消器性能更优良。
参考文献
[1]黎盛泉,廖羽宇,陈宁.交叉极化干扰工程边界条件分析[J].电子信息对抗技术,2016,31(4):43-46.
[2]李师师.无线通信系统中XPIC及载波同步实现技术研究[D].成都:电子科技大学,2014.
[3] Peter N,Mikhail P,Marek K,et al.The Design,Development and Implementation of a Cross-Polarization Interference Cancellation System for Point-to-point Digital Microwave Radio Systems[J]. IEEE CCECE,2011:1365-1369.
[4]苑津津.极化调制信号的交叉极化鉴别度(XPD)补偿算法研究[D].北京:北京邮电大学,2017.
[5] Hugo P,Nuno B C. Cross-Polarization Interference Cancelation (XPIC) Performance in Presence of Non-linear Effects[C]//IEEE INMMIC,2010.
[6] Herbig,P. A New Acquisition Technique for Carrier Recovery with QAM Signals[J].1993 Fourth European Conference on Radio Relay Systems,,1993:316-321.
[7] Cusani R,Baccarelli E,Di B G,et al.A Simple Polarization-Recovery Algorithm for Dual-polarized Cellular Mobile-radio Systems in Time-variant Faded Environments[J]. Vehicular Technology,IEEE Transactions on,2000,4(1): 220-228.
[8]魏宗帥.高速数传系统中的极化干扰抵消关键技术研究[D].长沙:国防科学技术大学,2015.
