医用充气式自动扩宫棒的设计
2019-09-09陈仁金孙小杨杨波庞皓文石翔翔
陈仁金,孙小杨,杨波,庞皓文,石翔翔
西南医科大学附属医院 肿瘤科,四川 泸州 646000
引言
一些妇科手术(宫腔镜、人工流产、刮宫术、放取环等)需对宫颈进行扩张以及在对妇科肿瘤(宫颈癌、子宫内膜癌等)患者实施近距离后装放射治疗时,为了能够更好地放置后装施源器,同样需要对患者宫颈做扩张准备[1-3]。但是,对于宫颈粘连或宫颈萎缩患者,扩宫操作往往非常困难。目前,临床上现有的常用扩张宫颈的方法为:采用直径不同的钢棒,先用直径最小的扩宫棒探查子宫的位置、形态,然后从小到大依次换用不同直径的扩宫棒放入宫颈,在宫颈停留一段时间后再取出更换更大直径的扩宫棒,如此反复插拔不同直径的扩宫棒以达到扩张宫颈的目的。然而,通过这种反复插拔的操作,使扩宫棒与紧缩的宫颈表面反复强烈摩擦,不仅增加患者的疼痛感,还会加剧宫颈表面毛细血管的破裂,导致宫颈内外口损伤,甚至导致患者出血过多,难以确保扩张宫颈的过程安全顺利进行。同时,不同直径的扩宫棒反复多次进入宫腔,容易将污染物带入宫腔,使腔内感染的概率增大。再次,医生需要不停的更换直径不同的扩宫棒,操作非常繁琐,耗时长。海藻宫颈扩张棒与钢棒相比,能够减小钢棒强行机械扩张导致的宫颈损伤和出血等并发症,安全可靠[4],但是海藻宫颈扩张棒扩宫过程耗时长,主要应用于人工流产领域[5],实时扩张宫颈的临床应用不多。
因此,研发一种能够减少患者出血和痛苦,缩短医生的操作时间并简化扩张宫颈过程的实时扩宫棒,具有非常重要的临床应用意义[6]。本文针对现有扩宫棒存在的缺点,将现代控制技术应用于自动扩宫棒的设计中,研制了一种医用充气式自动扩宫棒,以解决现有扩宫棒存在的诸多问题。通过模体测试,充气式自动扩宫棒满足设计要求,能根据设定的压力自动调节棒体内空气压力,操作方便。本文将对自动扩宫棒的结构和控制系统做详细介绍。
1 系统设计
系统设计主要包括自动扩宫棒的结构设计、硬件电路及软件控制策略的设计。其结构设计已获得国家实用新型专利(专利号:ZL201620603447.2)。
1.1 结构设计
本文设计的充气式自动扩宫棒主要由棒体、充气部分和连接部分等组成。总体结构示意图,见图1。
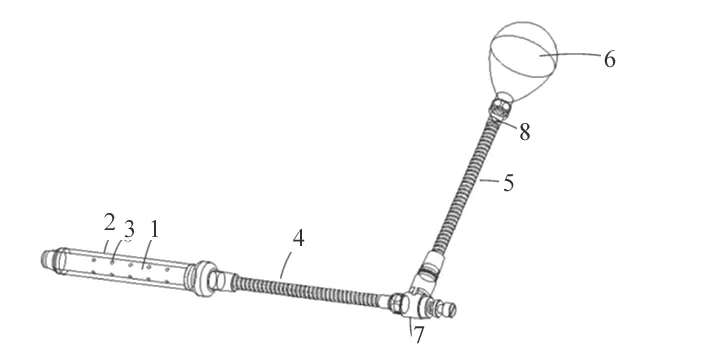
图1 充气式自动扩宫棒结构示意图
棒体用于插入患者宫颈,棒体上密封套设有一橡胶软管。位于橡胶软管内的棒体四周对称设置有若干通气小孔,气体通过通气小孔进入软管内。棒体内安装有空气压力传感器,用于检测棒体内部实时压力变化。棒体设计为前端呈类锥形的细棒,使医生更容易将棒体插入患者宫颈口。棒体内部为空心的通气通道,通过通气软管与充气气囊相连接。
导气管分为第一导气管和第二导气管,其结构相同。第一导气管和第二导气管通过螺纹与比例电磁阀相连接,通过比例电磁阀的控制可实时控制管内的压力。气囊通过不断压缩空气从而增大气体压力使棒体压力增大,控制系统控制电气比例阀的开口大小,从而保证棒体内压力适中,即能达到扩张宫颈的目的,又能减少患者的疼痛感。因为棒体外逐渐膨胀的软管不断作用于宫颈口内壁,从而使宫颈口逐渐得到扩张。
1.2 使用方法
患者平躺于妇科床上,将阴道口暴露于医生眼前。医生将自动扩宫棒的棒体套上避孕套,通过患者阴道,轻轻插入患者宫颈,使棒体中部位于宫颈。此时医生通过气囊不断向棒体内充气,气体从通孔处流向橡胶软管,橡胶软管逐渐膨胀,膨胀的橡胶软管使宫颈内壁受到压力而扩张。当压力达到设定值后,控制系统实时控制比例电磁阀的开口,从而能保证棒体内压力稳定。经过一段时间后,由于宫颈扩张后其作用于橡胶软管的压力减小,此时医生再通过气囊充气以增加棒体内压力,从而进一步扩张宫颈,直到满足临床要求为止。该充气式自动扩宫棒操作简单方便,对医生的技术水平要求较低,经过简单的培训后即可操作使用。
1.3 控制策略软件设计
本文对自动扩宫棒的控制主要是对棒体内空气压力进行控制。若棒体内空气压力过大,会导致橡胶软管过度扩张,扩张的软管外壁作用于患者宫颈口,必然导致患者疼痛加剧,甚至导致出血;若棒体内压力过低,压力不足导致橡胶软管在宫颈口的压力作用下内凹,起不到扩张宫颈的作用。同时,不同患者宫颈口的闭合程度不一样,对不同患者施加的空气压力也不同。以上因素都对自动扩宫棒空气压力的控制提出了更高的要求。本文设计的控制系统硬件部分主要由主控单元、电气比例阀、压力传感器、A/D 和D/A 转换装置构成。
为了更好地实现系统扩展和软件升级,本文选择TI 公司生产的TMS320F28335 作为控制系统的主控芯片。该芯片集成了DSP 和微控制器的长处,既能够实现高精度的数据处理任务,又能高效率地完成实时控制;同时具有丰富的IO 接口,便于系统扩展;6 组互补对称的PWM 输出[7],对电气比例阀的控制也更为方便;芯片上集成了一个12 位的A/D 转换器,对压力传感器的信号处理不需要配置专用的A/D 转换模块,只需要对传感器输出的信号做分压处理就能满足信号输入要求。
控制系统的基本原理为:控制器通过A/D 转换,对棒体内的气体压力信号进行采集与处理。设定值以模拟量的方式输入控制器中,与采集到的电信号值进行比较,通过电气比例阀的调节作用,使检测到的气压反馈电流信号与系统的输入电流信号之差减小并趋于零,从而实现对棒体内气压信号对输入信号的跟踪,以达到调节棒体内压力稳定在一定范围的目的。控制系统的原理图,见图2。
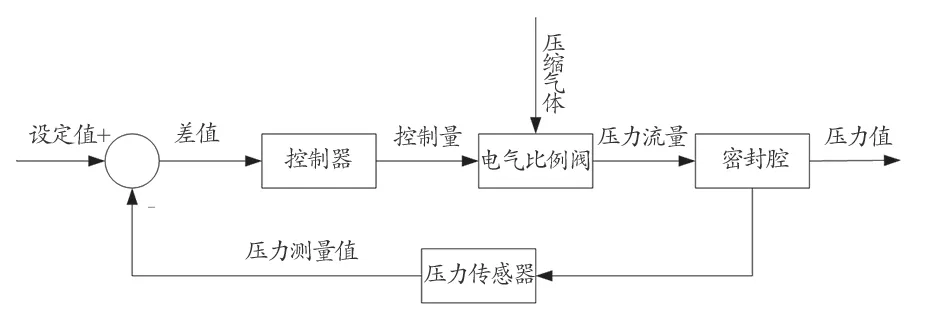
图2 控制系统原理图
根据相关研究报导,一些智能控制方法[8]现已逐渐应用到电气比例阀的控制中,例如模糊控制技术[9]、神经网络技术[10]、自适应控制技术[11]等,并已取得良好的控制效果。本文根据实际需要,对系统采用自适应控制的方法,其基本调节过程如下:当给定的设定信号大于反馈信号时,电气比例阀阀门开口变大,进入棒体内的气体流量增大,棒体内气压升高,压力传感器检测到的气压反馈信号增大,电压偏差信号随之减小;反之,当给定的设定信号小于反馈信号时,比例阀的阀门开口关小,流入气室内的气体流量减少,棒体内气压逐渐降低,直至电压偏差趋于零。
1.4 模拟量输入通道设计
压力传感器输出的信号较弱,且容易受到外界环境的干扰[12],因此本文所设计的控制系统对输入的棒内空气压力信号进行滤波和放大。由于外界干扰信号主要为高频信号,因此本控制系统设计的Sallen-Key 型二阶低通滤波器[13]用于信号调理电路。同时,因为压力传感器输入的模拟电压信号幅值为0~5 V,而DSP 的A/D 转换模块电压输入范围为0~3 V,所以在滤波的前向通路需要设计分压电路。为了保护DSP 芯片的A/D 模块,信号在A/D 转换前设置限位电路,其原理图如图3 所示。
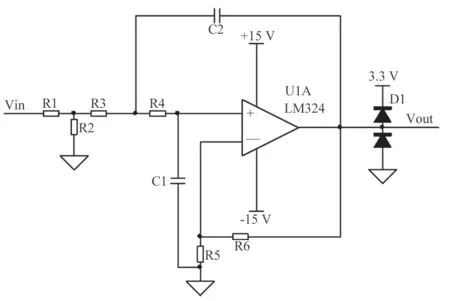
图3 模拟量输入电路
图3 中,R1、R2 构成分压电路,R3、R4、R5、R6、C1、C2 和LM324 构成Sallen-Key 型二阶低通滤波器,D1构成限位电路。输入电压Vin 经过分压和两级RC 低通电路后,再接到LM324 的同向输入端。高频信号的幅频特性下降速度为-40 dB/十倍频,比一阶低通滤波器提高一倍,满足设计要求。
2 实验结果与讨论
本文设计的充气式扩宫棒最大的优势在于减轻患者痛苦、简化扩宫流程和缩短扩宫时间,因此实验主要对比充气式扩宫棒和传统钢棒对宫颈的损伤和两种扩宫方式完成同样的扩宫效果需要的时间。实验装置[14]选用两个完全相同的女性人体模体,分别准备一套扩宫钢棒和一套充气式扩宫棒。通过比较宫颈口的划痕多少评估扩宫棒对患者的损伤程度,损伤等级分为轻度、中度和重度三级。为了避免不同医生对扩宫操作的熟练程度不同导致扩宫时间不同等人为因素的影响[15-16],采用同一个医生先后对两个相同模体实施完成相同宫颈口扩张尺寸的扩宫钢棒和充气式扩宫棒操作,并分别记录宫颈口损伤程度和操作时间。实验结果,见表1。
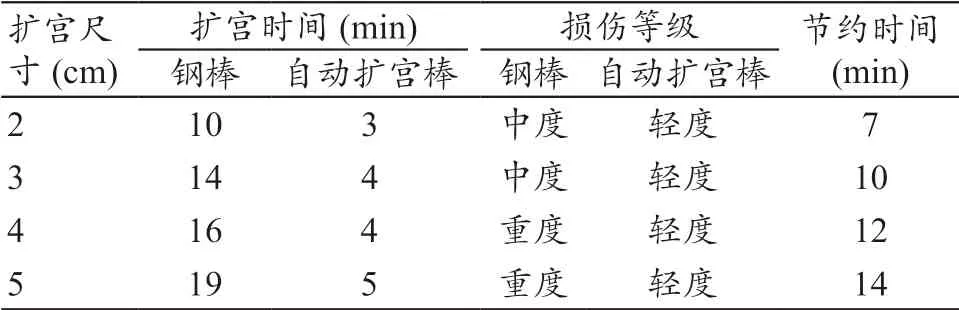
表1 充气式自动扩宫棒和扩宫钢棒实验结果比较
从实验数据可以看出,充气式自动扩宫棒能够显著提高扩宫效率,并减小扩宫过程中反复插拔钢棒造成的宫颈口损伤。其次,自动扩宫棒能大大减少扩宫时间,既减小了医生的工作强度,又增加了患者的舒适度。因此,本文研发的充气式扩宫棒能够显著改善传统扩宫方式的不足,使患者和医生都能够得到最好的扩宫体验。
3 结论
本文研究的充气式自动扩宫棒能够根据不同患者宫颈的情况,通过设置不同的压力值自动完成棒体内压力调节。当自动扩宫棒插入宫颈后,通过气囊逐步增加棒体内压力,压力传感器自动感应棒体内压力,当棒体内压力与设定压力趋于平衡时,DSP 控制电气比例阀开口大小,使棒体内压力与设定压力相等,从而可以根据不同患者宫颈情况设定不同棒体压力,使整个扩宫过程变得方便、简洁。充气式扩宫棒的研制减轻了患者的痛苦,缩短了扩宫时间,降低了患者出血过多的风险,具有很大的临床应用价值。
