仿生光磁导航技术发展研究综述*
2019-09-09赵慧俊刘晓晨郭肖亭
刘 俊, 赵 菁, 赵慧俊, 刘晓晨, 郭肖亭, 唐 军, 申 冲
(中北大学 仪器科学与动态测试教育部重点实验室 仪器与电子学院·太原·030051)
0 引 言
从古时候看太阳东升西落简单辨别方向,到如今精密的全球卫星定位导航系统(Global Positioning System,GPS),人类一直以来都对导航有很大的需求。仿生技术是建立在生物学、电子学、生物物理学、控制论、人机学、数学、心理学及自动化技术基础上的,利用电子学、机械技术研究生物结构,对能量转换和信息流动的过程进行模拟,从而达到改善和创造崭新的自动控制装置的目标的技术。至此,作为一种新型导航技术,仿生导航技术吸引了国内外研究者的目光。
导航是一种为运载体在航行时提供连续、安全和可靠服务的技术,是一门涉及到计算机、微电子、数学、自动控制、航空航天等众多领域的交叉学科。导航可分为自主式导航和非自主式导航。所谓自主导航,就是运动体完全依靠所载的设备,自主地完成导航任务,和外界不发生任何光、电联系,否则则称为非自主导航。导航技术不仅在人们的日常生活中发挥了重要的作用,而且在军事国防领域也占据着极其重要的地位,如在导弹制导、侦察等领域中可发挥重要作用。基于多种导航技术的组合导航系统,也高度依赖卫星信号。然而,这些导航系统易受外界干扰而无法正常工作,如人为损坏卫星设施、人为电子对抗等。为此,人们开始将目光转向仿生导航,研究各种生物在日常行为中所使用的导航方法,寻找不易受到外界干扰的新型导航方法,由此即产生了仿生导航。
仿生导航是对自然界中某些生物如何利用某种环境或者利用何种自然特性实现导航而进行研究的基础上,通过模仿这些生物现象和原理并将之应用于实际的一种新兴技术。生物经过长期进化,逐渐形成了与生长环境相适应的组织、结构和生活方式,这为人类的技术创新提供了想象空间和参考依据。
1 仿生光流导航
1.1 仿生光流导航的原理
在自然界中,蜜蜂在往返巢穴时,是依靠飞行过程中感受到的视觉变化来进行导航的。当蜜蜂在自然界中飞行时,自身相对于外部物体的运动会在其视网膜上产生图像变化。这种图像变化形成了所谓的“光流”信息,蜜蜂正是根据这种“光流”信息来执行速度测量、着陆、姿态控制等各种导航任务。“光流”的概念是Gibson在1950年首先提出来的。它是空间运动物体在观察成像平面上的像素运动的瞬时速度(如图1所示),是利用图像序列中像素在时间域上的变化及相邻帧之间的相关性来找到上一帧图像与当前图像之间存在的对应关系,从而计算出相邻帧图像之间物体的运动信息的一种方法。“光流”信息除了可提供距离信息外,还可提供角度信息,其在目标对象分割、识别、跟踪、机器人导航及形状信息恢复等方面均有着非常重要的应用。

图1 光流法显示物体的瞬时速度Fig.1 Optical flow method shows the instantaneous velocity of an object
1.2 国内外发展现状
2000年, 德国的Neumann H等人[1]提出了一种基于光流的机器人导航方法,该方法能够使机器人在非结构化的环境中避开障碍物并确定可以安全通过的自由空间。经实验验证,该方法十分适合被应用于导航任务中。2003年,Tautz J[2]提出了“蜜蜂的距离估计是基于飞行过程中所经历的光流积分”的观点。2011年,韩国的Seung-Eun Yu[3]提出了一种全新的、基于地标的机器人归航导航匹配方法。与传统的图像匹配算法相比,新方法提高了准确率。2014年,法国学者Roubieu等人[4]在真实的物理机器人上实现了“横向光流调节自动驾驶仪”。该驾驶仪由两个相互交织的反馈回路组成(速度回路和横向控制回路),每个回路都有自身的光流(Optical Flow,OF)设定点。结果表明,仿生机器人可以在走廊安全地进行导航,并对干扰做出适当反应。实验证明,与传统的图像匹配算法相比,该方法从任意位置返回指定点的成功率更高。2015年,瑞典的Linander等人[5]研究了平移光流量的突然变化对大黄蜂的位置和速度控制的影响,找到了大黄蜂避障飞行的原因,为机器人避障导航提供了参考。2018年,Franceschini[6]根据苍蝇的复眼结构,设计了光流导航的策略和传感器,为工程师提供了应用于智能自动驾驶车辆等领域的新型装置和机器。同年,墨西哥天体生物学研究所的Aguilar-Gonzalez Abiel[7]提出了一种像素/窗口并行方法,使用绝对差分和的相关函数来计算光流。此外,为了改善灰度梯度,Aguilar-Gonzalez Abie还提出了将灰度梯度的旋度作为预处理步骤的想法。实验证明,该算法提高了光流精度和处理速度。2018年5月,Pakpong Chirarattananon[8]提出了一种将光流与惯性测量单元相结合的方法,以估计无人驾驶飞行器(Unmanned Aerial Vehicle,UAV)的飞行高度。该直接使用通过图像梯度评估光流信息的方法,简化了计算步骤。2018年6月,美国的Ashraf等人[9]针对当前的导航系统高度依赖GPS的问题,提出了一种基于卡尔曼滤波器的智能光流算法。针对传统测量方法在计算过程中成本高且速度慢的问题,提出了一种基于人工蜂群的块匹配算法,提高了光流算法的实时性与精度。2019年,美国明尼苏达大学的DoTien等人[10]介绍了一种自适应光流算法。该算法通过逐步使用更多部分的图像信息,在不利条件下(如当在黑暗、无纹理地板上飞行时)精确地估计了四旋翼飞行器的水平速度,提高了精确度。2019年,Boris Miller等人[11]通过光流估计了无人机的速度,精确确定了无人驾驶飞行器的高度,提高了准确性。2019年,法国的Julien Dupeyroux等人[12]提出了一种蚂蚁灵感导航方法。沙蚁根据大气的偏振模式解算自身的航向信息,并根据步幅计数方法和光流信息来判断行进的距离。由蚂蚁启发的路径积分(Path Integral,PI)策略可用于补充经典光流技术,具有高鲁棒性和实时性的特点。2019年,加拿大的M. M Mostafa等人[13]介绍了一种智能混合视觉辅助惯性导航系统(Vision Aided Inertial Navigation System,VAINS)。该系统包括了全球卫星导航系统(Global Navigation Satellite System,GNSS)和惯性导航系统(Inertial Navigation System,INS)。该混合系统基于光流和回归树的单目视觉测距、高斯过程回归(Gaussian Process Regression,GPR)和用于数据融合的扩展卡尔曼滤波器(Extended Kalman Filtering,EKF),减小了累积的定位漂移误差,提高了系统的可靠性。
2018年,北京航空航天大学的陈中原等人[14]将多个光流传感器安装在不同位置、不同观察方向的微型飞行器上,对飞行器周围的光流进行了检测。采用EKF对惯性和光流数据进行了融合,来估计导航误差,降低了由光流信息失锁而引发的精度发散,提高了导航精度。同年,宁晓琳等人[15]提出了一种基于光流的角速度估计方法。与以前的方法不同,新方法只需要两个连续图像中的恒星坐标,消除了星形识别的过程,降低了计算的复杂度。同年7月,南京航空航天大学的杨盛伟等人提出了一种基于Mean-Shift算法的光流测速优化方法。该方法可以有效减少干扰对无人机测速的影响[16]。同年9月,兰州交通大学的曾幼涵等人针对惯性导航积分累积误差大的问题,提出了一种基于惯性和光流的融合算法[17]。该算法不需要外部辅助定位系统,不需要已知飞行环境,不需要昂贵的传感器,降低了传统INS对GPS的依赖。同年9月,中国船舶重工集团公司的周秀珍等人针对微型飞行器在定位过程中GPS信号无效且无已知地面合作目标的情况,提出了一种导航算法。其新颖之处是采用了三层嵌入式卡尔曼滤波器结构实时进行光流计算及三维转换,可以有效提高飞行器在室内和室外飞行时的效率和鲁棒性[18]。同年10月,太原工业学院的王瑞荣等人针对光照极弱或光流传感器离地高度小于摄像头焦距的情况,提出一种基于Elman神经网络的速度预测方法[19],提高了导航系统对环境的适应性。同年11月,宁夏大学、长春工业大学的郝志洋等人针对在室内环境下GPS信号弱或无GPS信号的情况,提出了将改进ORB算法与特征光流算法相结合来得到飞行器的光流信息数据,并且将光流信息数据与飞行器的惯导数据相融合[20],提高了飞行器的姿态稳定性。
1.3 发展趋势
目前,仿生光流导航技术已经在军事、工业、建筑及医学等领域获得了广泛的应用。随着系统集成技术的不断发展,仿生光流导航模型正不断趋于小型化、集成化。人类对仿生技术的深入研究使应用于该技术的生物特性的种类会不断扩大,而这些都将会促进仿生光流导航技术的发展。未来,该技术将大量被应用于各种智能机器人的设计与研发当中,在国防、医学制药、食品检验、工业等关系国计民生的领域中发挥突出的作用。虽然,目前仿生光流导航技术已经取得了很大进步,但其在稳定性、再现性和精度等方面还存在很大缺陷。因此,未来需在巩固现有技术的基础上,不断完善其性能。仿生光流导航技术的具体发展趋势如图2所示。

图2 仿生光流导航技术的发展趋势Fig.2 Development trend of bionic optical flow navigation technology
2 仿生偏振光导航
2.1 仿生偏振光的导航原理
由于大气粒子的散射作用,太阳光在经过地球大气层时产生了规律性分布的偏振态,其能提供天空光的偏振度和偏振角信息,并呈现出了一系列时空连续分布特性。众多研究表明基于这种特性,许多生物可以实现自主导航。T. Labhart和E. P. Meyer[21]经过研究发现,蟋蟀等昆虫复眼背部区域(Dorsal Rim Area,DRA)规则排列的特殊小眼结构是其对天空偏振光敏感的基础,如图3所示。DRA区域的感杆束短且宽(如图3(a)所示),提高了对光强的接收率。即使在光线较暗时,复眼仍具有较高的灵敏度。这些昆虫还具有三类偏振对立神经元(Polarization-Opponent neurons,POL-OP),如图3(b)、图3(c)所示,其对偏振光的响应随体轴与太阳子午线方向夹角的不同而呈正弦曲线变化。当夹角为10°、60°和130°时,对偏振的响应最大。蟋蟀通过对三类输出信号进行综合解译,进而得到导航信息。
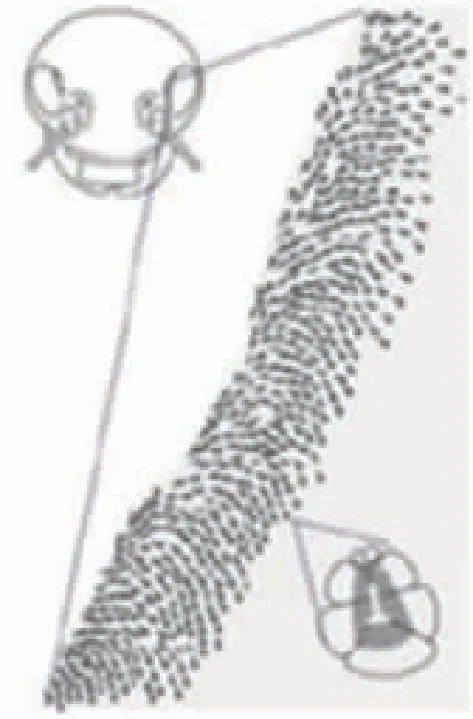
(a)DRA区域视神经感杆

(b)POL-OP的响应

(c)中心复杂神经元的功能

(d)晴朗天空偏振光分布模式示意图及 蟋蟀DRA区域视野范围图3 蟋蟀的偏振敏感机理Fig.3 Polarization-sensitivive mechanism of crickets
2.2 仿生偏振光导航的国内外研究现状
在国外,有关偏振光导航的研究可以追溯到19世纪初。法国学者Arago首先发现了天空光的偏振现象[22]。1982年,瑞士苏黎世大学的Wehner提出了描述天空偏振光分布模式的Rayleigh模型[23],之后该模型成为了现有大气偏振模式中被应用得最为广泛的理论模型。2000年,苏黎世大学的Dimitrios Lambrinos等人根据沙蚁的导航机理设计了偏振传感器,它可以利用检测到的天空偏振信息实现二维导航定向,并且成功地完成了导航实验[24]。澳大利亚学者Javan Chahl将偏振传感器搭载在飞行器上进行了相关实验,实现了飞行体的导航与稳定控制,打开了无人机导航的新途径[25]。2018年9月,加州理工学院的Giraldo Ysabel Milton等人发现果蝇的E-PG神经元可作为内部罗盘,并且通过实验发现E-PG神经元可以跟踪太阳从而进行导航[26]。同年,伊利诺斯大学的Missael Garcia等人提出了一种基于螳螂虾视觉系统的高动态范围偏振成像传感器,实现了140dB的动态范围和61dB的最大信噪比[27]。之后,来自昆士兰大学的Samuel B.Powell等人提出了利用水下偏振模式进行地理定位。他们使用仿螳螂虾的水下偏振相机进行了测试,地理定位平均精度达到了6m/1km[28]。2019年1月,艾克斯-马赛大学的Julien Dupeyroux等人根据沙漠蚂蚁复眼的启发设计了一种2像素的偏振视觉传感器,其在紫外波段具有特殊的灵敏度,性能优异[29]。
国内对于大气偏振光仿生导航的研究起步相对较晚,但是同样取得了很多成果。合肥工业大学的高隽课题组从2003年开始了仿沙蚁的偏振光导航研究,在大气偏振光分布特性及其相关理论、大气偏振信息获取及其导航应用等领域开展了大量的研究工作[30]。2005年,大连理工大学的褚金奎课题组开始对基于瑞利散射理论的大气偏振模式的理论仿真及其导航应用开展研究,提出了一种基于最小二乘支持向量机的航向角误差补偿算法[31],之后又研制出了许多微型化的偏振传感器[32-33],还设计出了偏振光实时定位系统[34]。实验证明,该系统满足了实时性和精度方面的需求,可被应用于实际定位。
哈尔滨工业大学的卢鸿谦等人将偏振光定姿定向加入到了组合导航之中,提出了基于多个偏振探测单元的太阳矢量敏感装置和太阳矢量估计算法[35],提高了系统的可靠性和精确性。中国科技大学通过与中科院先进制造所合作,将研制的成像式偏振光导航传感器应用到了汽车导航系统,并且获得了与惯性导航、GNSS一致的导航精度[36]。中北大学刘俊课题组提出了一种基于全天域大气偏振模式的姿态计算方法[37],实验证明该算法具有较高的精度。2018年10月,北京航空航天大学的赵慧洁等人研究了不同天空条件下的大气偏振模式,提出了一种利用偏振角(Angle of Polarization,AOP)的对称性求出太阳子午线的导航方法[38],提高了系统的鲁棒性。2019年,西北工业大学的周军等人提出了一种基于天空偏振光传感器和磁力计的姿态确定方法,推导了偏振传感器和三轴磁强计的测量模型,最终以卫星姿态方程为状态方程,提出了一种用于计算卫星姿态的卡尔曼滤波器[39],并通过实验验证了其估计卫星姿态信息的可行性。同年2月,大连理工大学的关乐等人提出了一种基于极坐标变换的全偏振信息提取方法,提高了偏振角的精度[40]。国防科技大学的张文静等利用Sony最新的IMX250-MZR微偏振阵列芯片,实现了60FPS以上的实时天空偏振模式测量。经过实验测试,其航向角获取精度超过了0.1(°)[41]。
2.3 发展现状
目前,仿生偏振光导航在器件方面,主要朝着微型化、集成化的方向发展。Sony公司目前研制出了像素化的偏振CMOS传感器,在传感器的光电二极管上集成了一层偏振片,四个不同偏振角度的偏振片分别置于单个像元上,将每四个像元作为一个计算单元。同时,仿生偏振光导航在算法方面,还有待进一步完善,通过改进算法可以进一步提升导航的自主性及精度(如图4所示)。

图4 仿生偏振光导航发展趋势Fig.4 Bionic polarized light navigation development trend
3 仿生类脑导航
3.1 仿生类脑导航原理
人类在很早的时候就发现某些动物具有辨别方向的能力,即便是在极其恶劣的环境中,它们也能完成准确高效的道路导航,俗话说的“老马识途”就是最真实的写照。研究者们根据生物(如蚂蚁、蜜蜂、鼠类等)拥有的大脑定位功能进行了一系列仿生类脑导航研究。科学家莫泽夫妇和约翰·奥基夫分别于1971年和2005年发现了大脑中的两种神经细胞——位置细胞和网格细胞,如图5所示。这两类细胞有机地构成了大脑的定位系统,前者在脑中形成所处地点的地图,后者形成帮助大脑进行精确定位和导航的坐标系统。1984年James Ranck等人发现的头方向细胞、2008年研究人员发现的边界细胞以及2015年莫泽夫妇发现的速度细胞,均起到了辅助导航的作用。其中,头方向细胞能够辨别生物头部的朝向,边界细胞可以计算生物到达墙壁等边界的距离,速度细胞在生物脑中充当了“速度计”的角色,用于判断生物在某一时刻的移动速度。

图5 神经网络Fig.5 Neural networks
3.2 国内外研究现状
2008年,中南工业大学的学者针对动态避障问题,提出了一种基于无线传感器网络(Wireless Sensor Network,WSN)与蚁群算法的新算法。实验证明,该算法在多动态障碍物的实时环境下提高了传统遗传算法的整体性能[42]。2009年,南京航空航天大学俞晓磊等人根据受到外部刺激的兔子观察到的嗅球神经活动,提出了一种基于感知-动作仿生学的新型无人机导航多感知统一反应机制[43],提高了无人机的自主导航能力。2013年,吉林大学的孙超提出了一种实现生物机器人自动导航的新方法。该方法采用广义回归神经网络(Generalized Regression Neural Network,GRNN)[44],对人体操作的控制过程进行了分析和建模。实验证明,该方法可成功地控制生物机器人精确地进行路径导航。2013年,吉林大学的李颖提出了一种基于仿生优化算法的降维方法——蚁群优化选择(Ant Colony Optimization Selection, ACO-S)法,以用于高维数据集[45]。实验结果证明,该方法是一种可应用于移动机器人导航的有效工具。2014年,上海大学制造业自动化与机器人重点实验室提出了一种基于神经行为学原理的移动机器人仿生导航算法[46],其包括了用于环境感知的生物天线模型和用于运动规划和控制的改进算法,减少了计算负担。2015年,国防科技大学机电工程与自动化学院的张潇等人在传统鼠类导航模型(Rat Simultaneous Localization and Mapping,Rat-SLAM)的基础上引入了光学双轴速度传感器和微惯性测量单元(Micro Inertial and Measurement Unit,MIMU)[47],其环境适应性和精度均得到了提高。同年,浙江大学的田莉雯等人实现了一种分别从顶部摄像头和鼠载摄像头两个角度设计的大鼠自动导航系统[48],成功模拟了GPS导航系统,提高了系统的可行性。2016年,北京工业大学的李倜构建了基于大鼠海马结构(生物进行空间认知的核心脑区)的神经网络模型,并将此模型应用于快速准确的认知地图构建[49]。实验证明,机器人能够快速准确地进行导航。同年,空军工程大学信息与导航学院的周阳等人指出,自由移动的啮齿动物大脑中的头方向细胞(Head Direction Cells,HDC)和网格细胞(Grid Cells,GC)分别与移动方向和距离有关,这些细胞在啮齿动物的路径整合中起到了重要作用[50]。他提出了基于HDC和GC特性的、由生物学启发的路径集成模型,并验证了模型的有效性和稳定性。2017年,厦门大学智能类脑系统重点实验室提出了一种基于模糊关联BK积分的仿生机器鱼路径规划方法[51],并通过实验验证了该方法的有效性。同年,安徽工程大学电气传动与控制重点实验室的许曈等人针对自组织映射(Self-Organizing Map,SOM)神经网络仿生优化方法实时性不佳的问题,提出了一种可降低系统复杂度的动态增长自组织映射(Dynamic Growing Self-Organizing Map,DGSOM)神经网络算法,并将其与Rat-SLAM模型进行了融合[52],以更快地实现闭环检测,使系统具有良好的实时性。同年,电子科技大学的彭杰钢等人根据弱电鱼具有的主动电子定位功能提出了三种定位算法,其中包括交叉定位算法、随机定位算法与频域粒子群优化定位算法[53],实现了黑暗环境下水下定位系统的任务。同年,四川大学的唐华锦等人通过分别实现海马体和内嗅皮质的认知记忆和映射功能,开发了一个神经生物学启发系统[54],使移动机器人能够在迷宫环境中执行基于任务的导航。2018年,安徽工程大学的陈孟元针对在复杂的室内场景中、传统鼠类导航模型(Rat-SLAM)因光线变化或其他因素而导致的算法性能降低的问题,提出了构建一种基于多细胞导航机制的BVGSP-SLAM模型,将RTAB-Map闭环检测策略引入到了Rat-SLAM系统[55],提高了系统的准确度。同年9月,大连理工大学的关乐等人受到弱电鱼在检测和识别物体方面的卓越性能的启发,设计了可以解决类似远程物体感知问题的技术传感器系统。通过构建在导电介质(水或电离气体)中可产生电流脉冲并同时可感测局部电流密度的设备,将有源电子定位原理应用于系统中,实现了远程物体的高精度感知[56]。同年,国防科技大学的郑贤德等人注意到鱼类可以利用侧线器官感知周围的流场并由此实现导航,进食和避开捕食者、障碍物[57],这为新型水下探测技术的发展提供了重要参考。应用由9个水下压力传感器组成的人造侧线,形成了十字形传感器阵列,提高了导航性能。2019年,中北大学课题组针对卫星信号中断条件下的INS误差累积问题,提出了一种基于海马导航细胞模型的类脑导航方法。通过类脑导航模型的校正,降低了INS的累积误差,提高了导航精度[58]。
2017年,奥地利学者Hartbauer Manfred等人[59]通过研究蝗虫的“碰撞探测器神经元”开发了一种简单的算法,来重现在目标逼近期间的神经元响应,并设计了一个简单的车辆碰撞检测系统,提高了处理速度。2018年7月,印度国家技术研究所的Sahu C等人[60]修改了蚁群优化技术的基本参数,以增强对自适应蚁群优化的控制,并设计和开发了一种新型导航控制器,提高了算法效率。2019年,Oyvind Arne Hoydal等人[61]指出海马体和内侧内嗅皮质是大脑系统的一部分。在导航过程中,它们可以在近端环境中绘制自定位地图。同年,Francesco Savelli[62]得到了啮齿动物的路径整合与位置细胞和其他空间细胞的基本属性密切相关的结论,探讨了机器人如何在不熟悉的领域进行地图构建和路径整合。
3.3 发展趋势
纵观仿生类脑导航技术的发展现状,其研究方向虽然多种多样,但总体上仍处于初级阶段,许多问题还值得探讨和进一步解决。如何在复杂的环境(如室内外光线变化、突发障碍物等因素)下完成快速准确的导航,以及如何减少长时间导航产生的误差,是亟待解决的问题。可以说,将来仿生类脑导航不仅能够在人们的日常生活中发挥重要作用,也将在军事国防领域占据重要地位。借鉴生物模型完成空中及水下导航,也是未来发展的重要方向。
4 仿生地磁导航
4.1 仿生地磁导航原理
地磁场是地球上非常重要的物理场,它包含十分丰富的参数信息。许多研究表明,很多生物都可以利用地磁场进行定位和导航[63]。地球的外核中富含铁流体,这些流体的运动形成了地磁场。它是一种矢量场,如图6所示。磁力线环绕地球时产生的磁倾角、磁偏角以及不同磁纬度对应的磁场强度,构成了地磁场三要素[64]。因此,地磁场可以稳定地为一些动物提供导航信息。
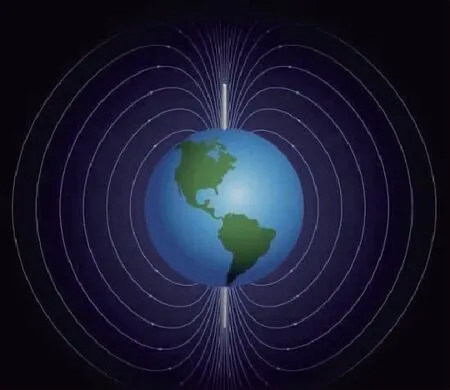
图6 地磁场Fig.6 Geomagnetic field
4.2 仿生地磁导航的国内外研究现状
地磁导航可以追溯到古代使用的指南针及罗盘等,这种导航利用磁偏角进行导航。到近代,随着仪器设备的发展及人们对仿生地磁导航更加深入的研究,仿生地磁导航也成为了导航的热点方向。1977年,英国Clarendon实验室的Leask M J通过研究候鸟的迁徙提出鸟类的视网膜上有光敏色素来感知周围磁场,由此发现了一种新的磁感知模型[65],为之后的研究奠定了基础。2000年,来自美国伊利诺伊大学的Ritz等人对之前的模型进行了修正,并且发现视网膜上的隐花色素是磁感应系统的一部分[66]。2007年,Wiltschko发现鸟类存在两种磁感知机制,除了视网膜上的光受体,还有一种涉及富铁粒子的过程。例如,鸟的上喙存在一种磁铁矿纳米颗粒,可以为其提供航向信息[67]。2010年,Storms W等人根据前人的理论,通过周边磁场强度的变化,设计了室内环境下的仿生地磁导航系统[68]。实验证明,该系统可在GNSS信号不可用时用于辅助惯性导航系统。英国伦敦大学的Marshall Stoneham等人在2012年提出了一种新型的、基于自由基的磁接收模型[69],解释了候鸟可以感知地球磁场的理论。2015年,北卡罗来纳大学的Brothers J通过研究海龟的归巢行为证实了地磁印记假说,证明了这种印记在海龟的产后归巢中发挥着重要的作用[70]。在这之后,Lohmann K J发现海龟和鲑鱼都具有检测沿海地区独特“磁性特征”所需的感官能力,而磁导航是海龟和鲑鱼长距离迁徙的主要导航模式[71]。2017年,西蒙弗雷泽大学的Lambinet V等人验证了蜜蜂可以感知磁场极性的假设[72]。韩国的Seong Ju-Hyeon等人通过将Wi-Fi与地磁相结合,提出了一种递归无线电图生成算法[73],增强了系统的实时性。
在国内,许多学者也对仿生地磁导航技术展开了广泛的研究。西北工业大学对仿生地磁的研究较早,取得的成果也较为丰富。2007年,晏登洋等人将惯性系统与地磁模型进行了组合,在Matlab环境下进行了仿真,提高了系统精度[74]。2014年,刘明雍等人从仿生角度出发,将导航过程归结为多目标搜索问题,建立了仿生导航模型,提出了一种基于时序进化策略的搜索方法[75],解决了导航过程中对先验地磁图的依赖问题。之后,他们针对地磁仿生导航过程中对搜索偏向性考虑不足的问题,提出了一种基于探索与开发权衡的导航方法[76]。实验证明,此方法能够有效提高导航效率。2016年,刘坤针对地磁场异常时载体导航失败的问题,提出了一种基于行为约束策略的仿生导航搜索方法[77],提高了自主导航的成功率。2017年,李红等人针对水下自主航行器地磁多参量多目标搜索问题,提出了地磁仿生导航的多目标进化搜索算法[78]。与传统的六边形路径搜索算法相比,多目标进化搜索算法更具有效性和优越性。2018年,王琼针对地磁导航受到先验地磁图的精度制约的问题,提出了一种平行接近的地磁梯度仿生导航方法[79],解决了传统方法依赖地磁先验信息的问题。2013年,中国科学院的吕琰提出了一种特殊的生物物理模型,包括基于磁铁矿和自由基的磁感应机制[80]。实验表明,所提出的模型可以用倾角罗盘解释鸟类的导航机制。2016年,东华大学的郭鹏杰将基于地磁导航的定位技术应用于小车之中,完成了智能小车的整体设计[81]。2018年,浙江大学的齐小康通过研究海龟等动物迁徙所依据的自然线索,利用数学建模及工程模拟,提出了仿生学地磁导航模型[82]。实验证明,此模型在精确导航领域有很好的应用前景。
4.3 发展趋势
目前,针对仿生地磁导航的研究,国内外尚处于仿真研究阶段。对于动物地磁导航使用的磁感知机制,业界的了解还不是特别深入。应加快完善仿生地磁导航模型,研究新型材料,提高仿生传感器件的灵敏度,使其向着微型化、集成化及智能化的方向发展(如图7所示)。

图7 仿生地磁导航发展趋势Fig.7 Bionic geomagnetic navigation development trend
5 结 论
向大自然学习,向人体自身学习是仿生学永恒的主题,也是仿生导航技术的发展方向。通过对仿生光流、偏振光、类脑和地磁导航四个方向的研究,可以看到目前仿生导航技术的机制已比较完善,已经能够制造出各种类型的仿生传感器,并将其成功应用于无人机导航等方面。同时,仿生导航在算法和器件上还有很大的发展空间。该研究也面临着许多困难,其稳定性和灵敏度还达不到较高水平,器件灵敏度和体积依然受到加工工艺与材料的限制。在未来,可以利用生物基因工程与微纳加工制造技术来改进现有仿生导航器件,使其具有微型化、集成化及智能化的特点,从而在保证小体积的前提下提高器件的灵敏度与探测的效率。
