永磁同步直线电动机的改进双矢量MPC电流控制
2019-09-04谢高硕施昕昕王通通
林 健,谢高硕,万 其,施昕昕,周 磊,刘 晗,王通通
(南京工程学院,南京 211100)
0 引 言
与旋转电机加滚珠丝杆所构成的直线运动机构相比,永磁同步直线电动机(以下简称PMSLM)具有高加速度、高精度和快响应速度等优点,很多学者对直线电动机的控制与应用做了深入的研究[1-2]。由于取消了机械传动环节,外界的干扰以及电机内部存在的推力波动更容易对电机的性能造成影响,会使电机运行时出现振动和噪声。PMSLM控制系统包括位置环、速度环和电流环,速度控制器根据实际速度与期望速度输出期望电流。为保证直线电动机能在某一速度下平稳运行,电流环需要较高的跟踪与调节能力,以保证能够时刻追踪期望电流,抑制各种扰动[3]。电流环的控制方法有:直接推力控制[4-5],比例积分(PI)控制[6]和模型预测控制。直接推力控制利用滞环控制,鲁棒性强,响应迅速,但电流脉动较大;PI控制在稳态下可实现电流无静差,控制精度高,但需整定参数,系统的动态性能受带宽限制;模型预测控制(以下简称MPC)[6-8]是利用当前的状态、控制量和模型计算系统将来的状态,再利用价值函数与期望值进行滚动优化的算法。MPC电流控制动态响应快、电流脉动小、无需参数整定,理论上能在2个采样周期内追踪到期望电流值,但在线计算量较大。
MPC电流控制方法常用的是单矢量MPC、占空比MPC两种方法。三相两电平电压逆变器共有8种开关状态,能产生6个有效矢量和2个零矢量,即逆变器共能产生7种电压矢量。单矢量MPC在一个采样周期中仅作用一个最优电压矢量,算法简单、响应速度快[9-10],但由于仅能在7种电压矢量中选择控制量,电流跟踪精度较差。为此,文献[11-12]提出了占空比MPC,由于占空比是在最优电压矢量确定之后再计算,因而不能保证最优电压矢量在加入占空比后仍为最优。文献[13]提出最优占空比直接转矩控制,即基于李雅普诺夫函数的占空比计算,保证了最优电压矢量的全局性,但作用的电压矢量仅为一个有效矢量与一个零矢量,限制了系统高速运行时电流的稳定性。文献[14]提出同步电机广义双矢量MPC控制策略,减小了d,q轴电流波动,但电压矢量选择次数多,计算量大,对系统的硬件要求较高。
本文提出改进的双矢量MPC控制策略,通过减小2个电压矢量的选择范围来简化电压矢量的选择过程,大幅减轻系统运行负担,有效提高电流环调节的实时性与跟踪精度。
1 PMSLM电流预测模型
PMSLM在d,q坐标系下初级电流的状态方程:

(1)

(2)
式中:L为初级电感;R为初级电阻;τ为次级极距;ψf为次级永磁体磁链;ud,uq为初级d,q轴电压;id,iq为初级d,q轴电流;v为初级运动速度。
设采样周期为T,用前向欧拉法对式(1)、式(2)离散化,可得PMSLM电流预测模型:

(3)
式中:id(k),iq(k)为kT时刻初级绕组中电流采样值的d,q轴分量;ud(k),uq(k)为kT时刻初级绕组中施加电压的d,q轴分量;id(k+1),iq(k+1)为(k+1)T时刻初级绕组中电流d,q轴分量的预测值。
2 MPC电流控制算法
2.1 单矢量MPC
7种电压矢量对应7组ud(k),uq(k)。单矢量MPC是将7组ud(k),uq(k)分别代入PMSLM数学模型中进行运算,得到7组下一时刻的电流id(k+1),iq(k+1)。再将7组id(k+1),iq(k+1)分别代入到价值函数gi中,求出使gi最小的id(k+1),iq(k+1),进而可以得到系统下一时刻最优的开关状态。为精确跟踪期望电流,同时避免出现电流过流,选取价值函数:

(5)

(6)

单矢量MPC电流控制具体步骤:
1)k时刻测量v,id,iq,根据式(3)、式(4)计算在7个电压矢量作用下产生的id(k+1),iq(k+1)。
2) 根据式(5)选出使gi最小的一组id(k+1),iq(k+1),对应的电压矢量即为最优电压矢量。
3) 将最优电压矢量转换为对应的开关信号,同时更新开关状态。
4)k+1时刻返回步骤(1)进入下一个采样周期。
2.2 占空比MPC
占空比MPC是在单矢量MPC的基础上引入占空比,即在一个采样周期内逆变器产生1个最优电压矢量Vs和1个零电压矢量V0。最优电压矢量选择的方法与单矢量MPC相同。


(7)
t0+ts=T
(8)
式中:ss为Vs作用时iq的斜率;ts为Vs的作用时间;s0为V0作用时iq的斜率;t0为V0的作用时间。
由式(2)可得s0和ss的计算公式:

(9)
(10)
式中:usq为Vs的q轴分量。将式(8)~式(10)代入式(7),可求出Vs与V0的作用时间:

(11)

(12)
占空比MPC电流控制具体步骤:
1)k时刻测量v,id,iq,根据式(3)、式(4)计算在7个电压矢量作用下产生的id(k+1),iq(k+1)。
2) 根据式(5)选出使gi最小的一组id(k+1),iq(k+1),对应的电压矢量即为最优电压矢量。
3) 根据式(8)~式(12)计算最优电压矢量及零矢量的作用时间并转换为对应的开关信号,同时更新开关状态。
4)k+1时刻返回步骤(1)进入下一个采样周期。
3 改进双矢量MPC算法
在占空比MPC中,根据整个采样周期作用的电压矢量来预测下一时刻的电流值并通过价值函数选择最优电压矢量。加入零矢量后,最优电压矢量作用的时间不再是整个采样周期,因此不能保证选择的最优电压矢量作用效果仍为最优。双矢量MPC针对上述问题做出改进,在选出最优电压矢量Vs1后,第二个作用的电压矢量Vs2不再局限于零电压矢量,而是扩展到7个电压矢量。此外,双矢量MPC根据2个矢量作用的总时间为整个采样周期来预测下一时刻电流并根据价值函数选择Vs2,保证了选择的电压矢量的作用效果最优,因而有更好的控制效果。但是该算法需要遍历14次电压矢量选择,计算量大,为此本文对电压矢量的选择方法加以改进。
3.1 Vs1选择方法改进

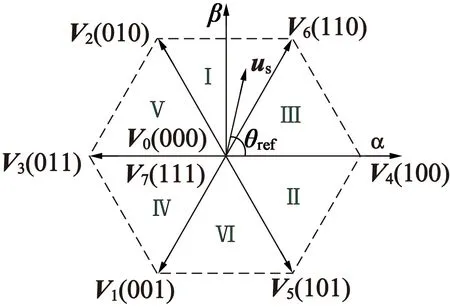
图1 改进电压矢量选择方式
图2为忽略初级绕组电阻压降的PMSLM空间矢量图。图2中,φ为功率因数角,Φ为内功率因数角,δ为功角,θe为初级电角度,ωe为电角频率。初级磁链ψs与初级绕组上的电压矢量us相角相差π/2。

图2 PMSLM空间矢量图
根据图2,可得us的矢量角:
θv=θe+δ+π/2
(13)
式中:δ=arctan(ψq/ψd);θe在很短的时间内可视作常数。

θref=θe+δ*+π/2
(14)
3.2 Vs2选择方法改进
在双矢量MPC算法中选择Vs2,以预测值与期望值误差最小为原则。为简化计算,在选择Vs2时,先进行以下判断。不妨假设kT时刻采样电流iq(k)小于期望电流iq*。
1) 若∣iq*-is1q(k+1)∣=0,则表示该采样周期内仅有Vs1作用时,q轴电流能追踪到期望值,is1q(k+1)为在Vs1作用下(k+1)T时刻的q轴电流预测值;若所有电压矢量在(k+1)T时刻产生的q轴电流预测值均小于或均大于iq*,则表示在该周期内不能通过双矢量调制追踪到iq*。
出现以上情况则不再进行第二次电压矢量选择,该周期内只作用Vs1。
2) 否则从余下6种电压矢量中选择Vs2。
根据上述方法,将Vs1与Vi组合,可得各自的作用时间,Vi表示一种基本电压矢量,i∈{0,1,…,7}。
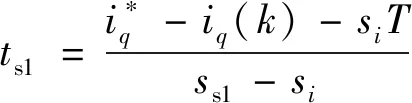
(15)
16)
式中:ss1为Vs1作用时iq的斜率;ts1为Vs1的作用时间;si为Vi作用时iq的斜率;ti为Vi的作用时间。那么k时刻施加的ud,uq可表示:
ud=ts1us1d+tiuid
(17)
uq=ts1us1q+tiuiq
(18)
式中:us1d和us1q分别为Vs1对应的d,q轴分量,uid和uiq分别为Vi对应的d,q轴分量。
将6种电压矢量分别与Vs1组合,根据式(15)、式(16)分配作用时间,根据式(17)、式(18)得到最终作用的电压矢量,分别代入式(3)、式(4)可得到6个电流预测值,利用式(5)选择出使gi最小的一组电压矢量组合。
改进双矢量MPC电流控制的系统框图如图3所示,速度控制器采用PI控制器。
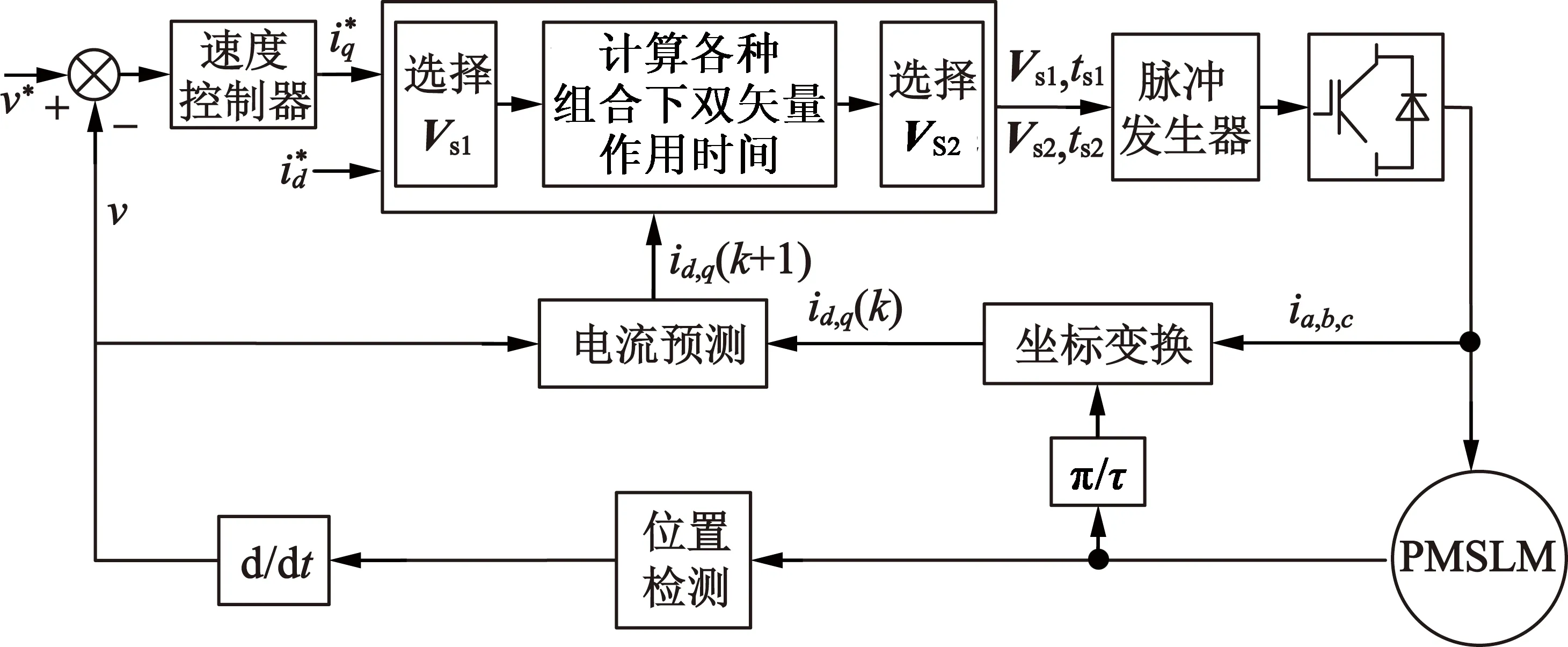
图3 改进双矢量MPC电流控制的系统框图
综上所述,改进双矢量MPC电流控制具体步骤:
1)k时刻测量v,id,iq,根据上述方法,通过计算us*的矢量角判断us*所处扇区,遍历3种电压矢量,选取最优电压矢量Vs1。
2) 根据上述方法列举6种组合,分配2个电压矢量的作用时间,通过价值函数选择Vs2。
3) 将Vs1,Vs2和对应的作用时间转换为对应的开关信号,同时更新开关状态。
4)k+1时刻,返回到步骤(1)进入下一个采样周期。

4 算法比较
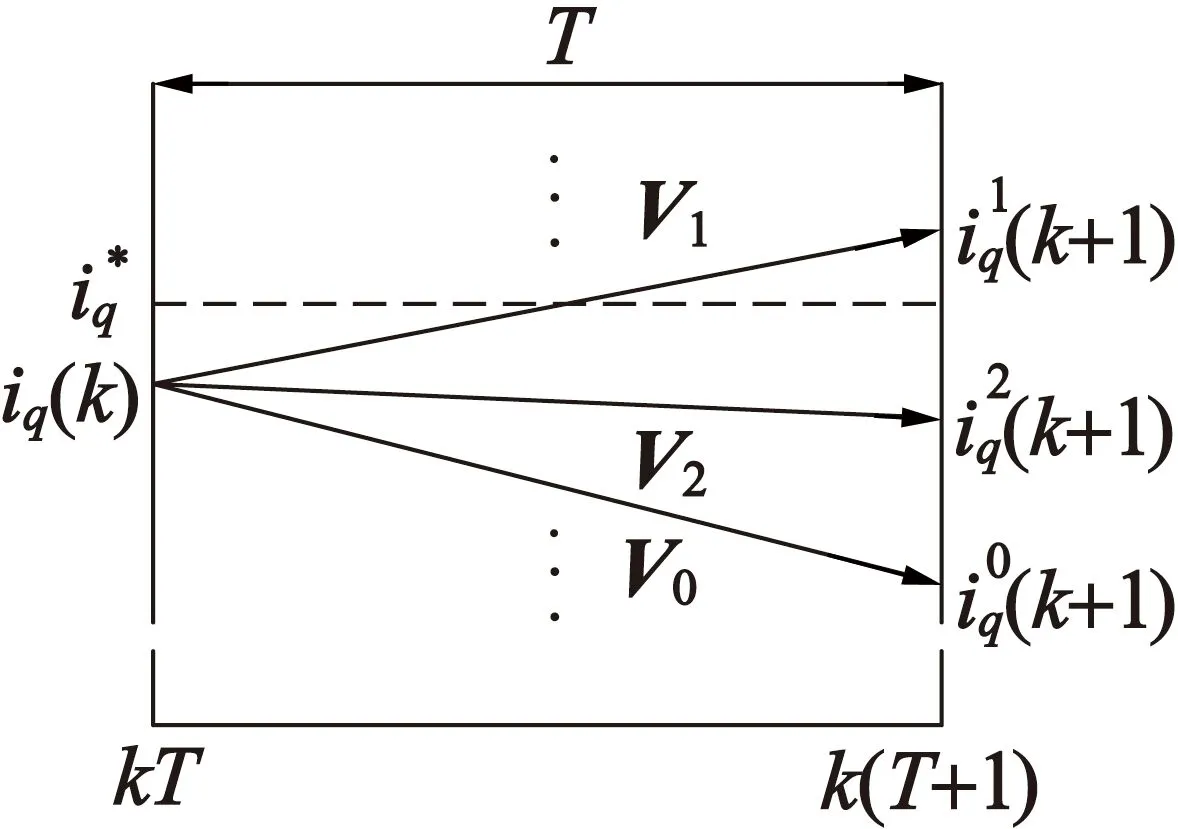
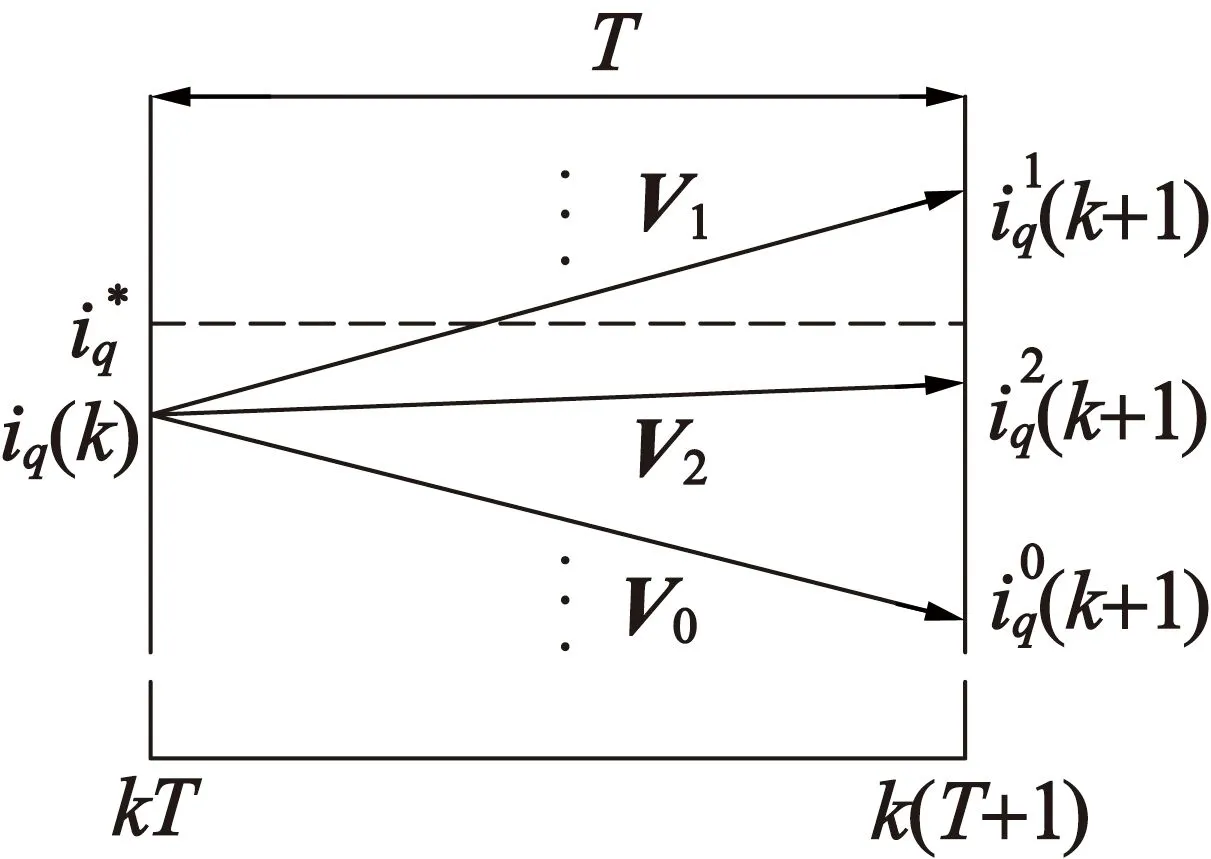
图4 单矢量MPC预测电流轨迹图

图5 占空比MPC预测电流轨迹图
(a) 选择Vs1
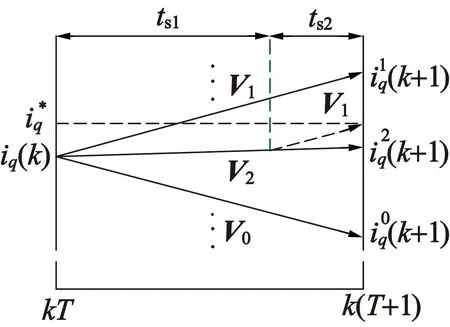
(b) 选择Vs2
图6改进双矢量MPC预测电流轨迹图
图7~图9为单矢量MPC、占空比MPC和改进双矢量MPC的调制输出电压矢量图。单矢量MPC只能输出7种电压矢量。占空比MPC在单矢量MPC中加入占空比调制,可输出零矢量与6个方向固定,任意大小的电压矢量。改进双矢量MPC能将任意2个基本电压矢量实行调制,不仅可输出占空比MPC生成的所有电压矢量,还可生成末端在虚线上的电压矢量,因此可输出的电压矢量范围更大,控制效果更好。
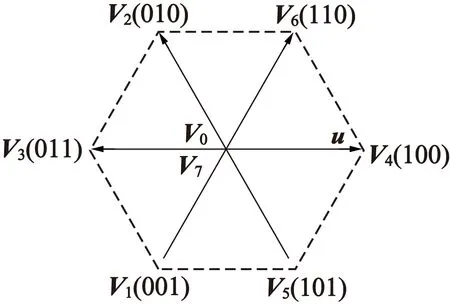
图7 单矢量MPC输出电压矢量图
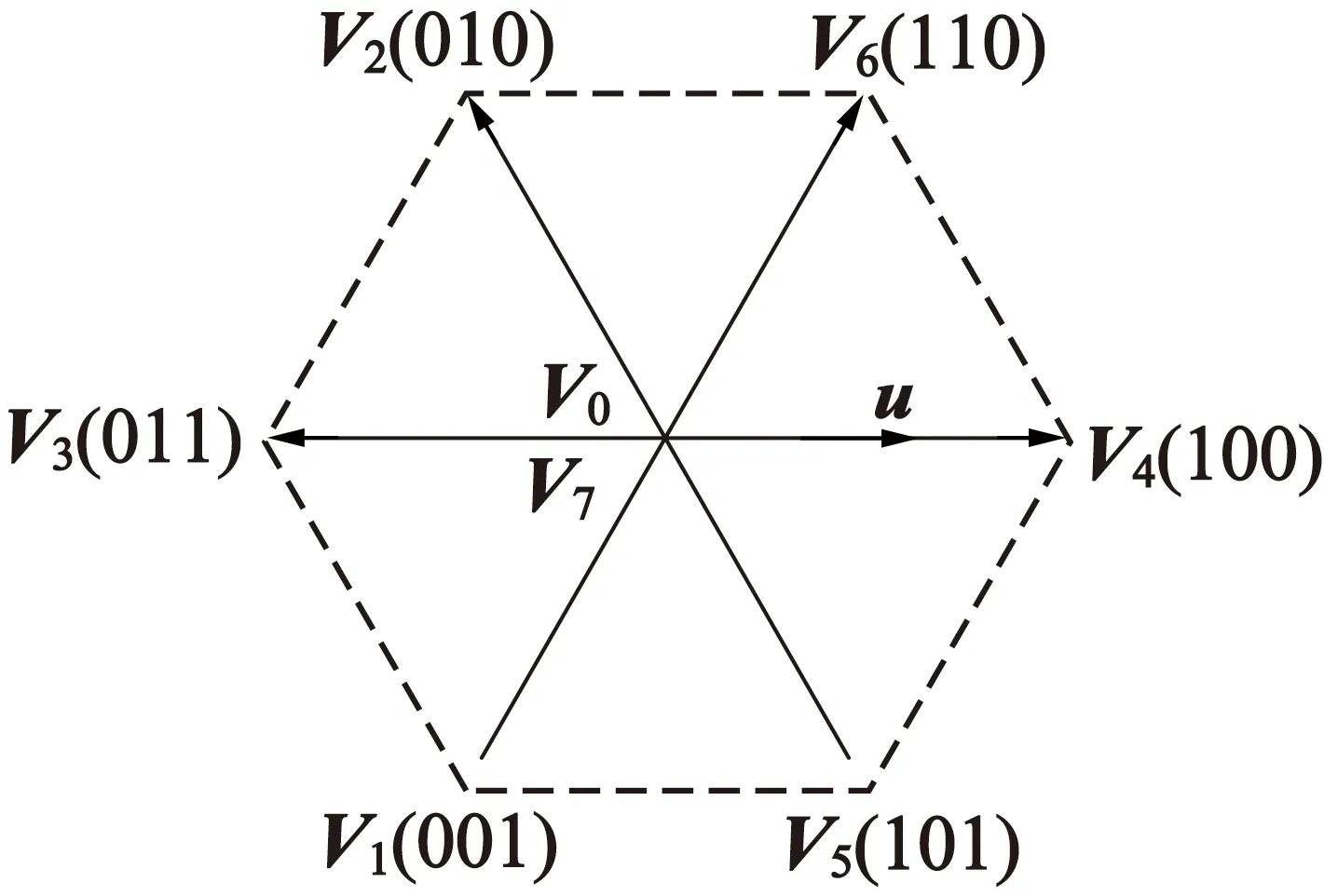
图8 占空比MPC调制输出电压矢量图
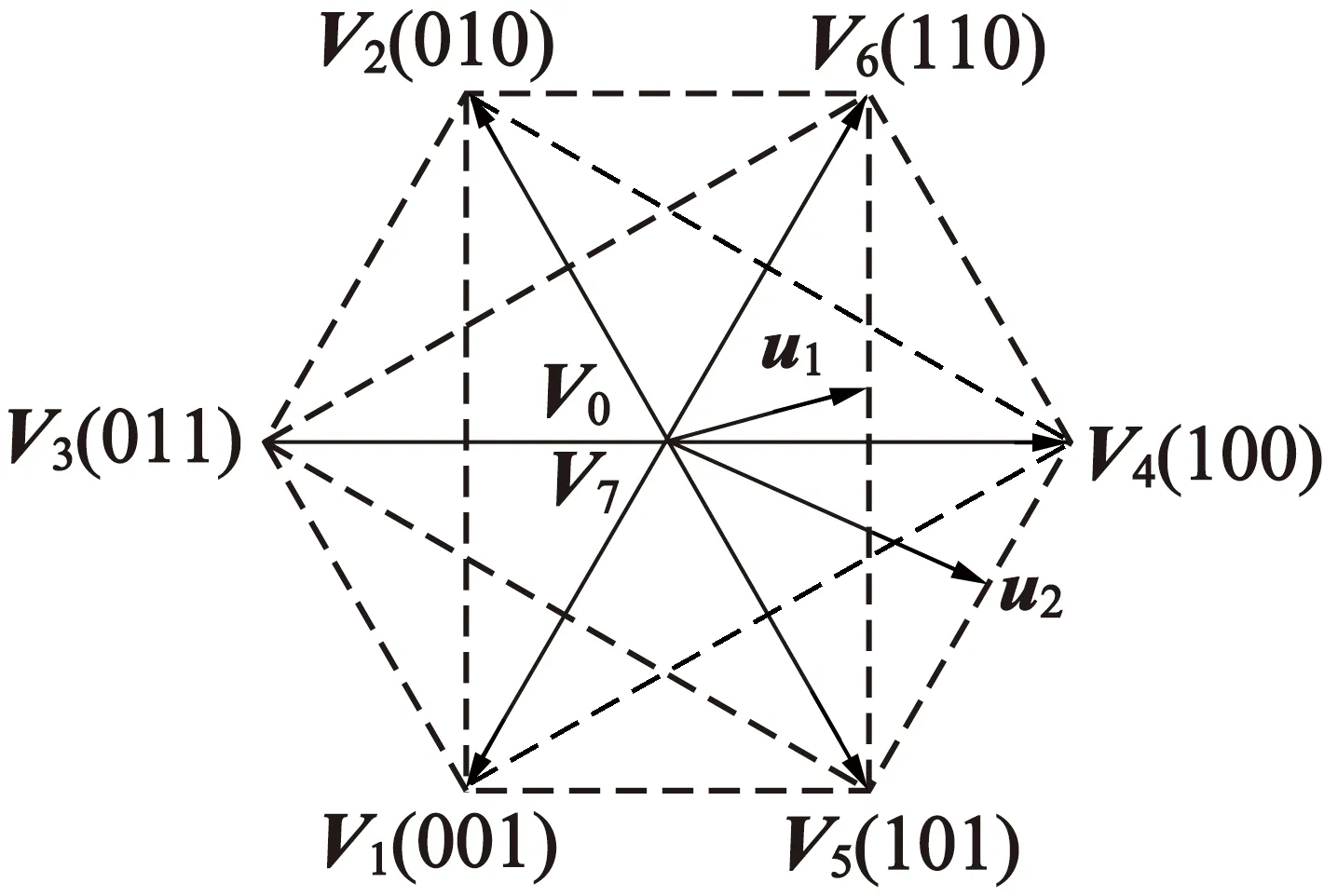
图9 改进双矢量MPC调制输出电压矢量图
5 实验研究
实验使用Kollmergen公司的PMSLM,使用德国HEIDEHAIN公司生产的LIDA485型直线光栅尺,测量长度1 840 mm。采样周期T取100 μs。整个永磁同步直驱电机伺服系统平台如图10所示。电机主要参数如表1所示。
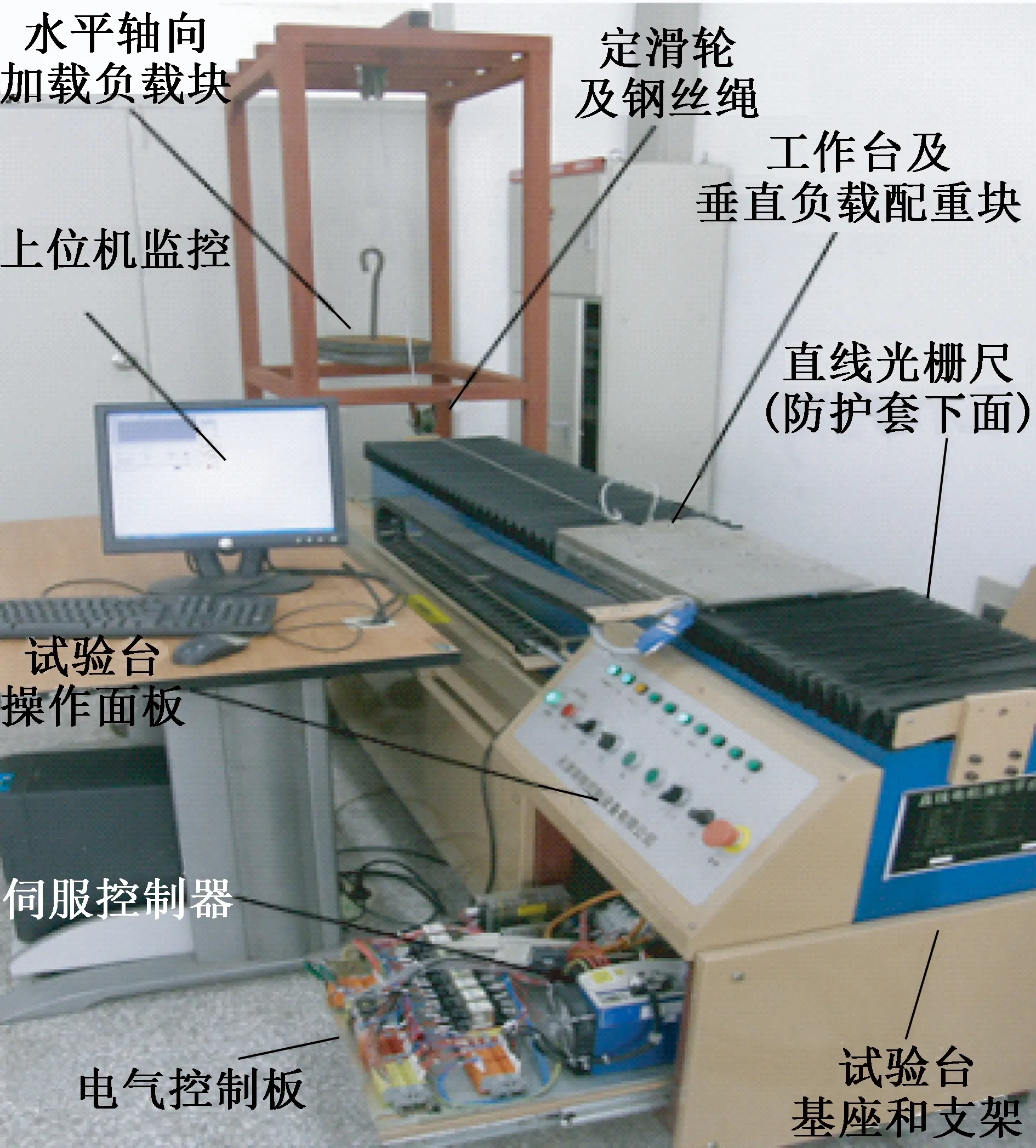
图10 直线伺服系统试验台
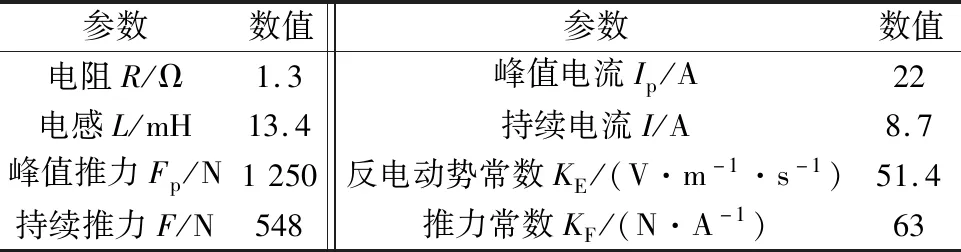
参数数值参数数值电阻R/Ω1.3峰值电流Ip/A22电感L/mH13.4持续电流I/A8.7峰值推力Fp/N1250反电动势常数KE/(V·m-1·s-1)51.4持续推力F/N548推力常数KF/(N·A-1)63
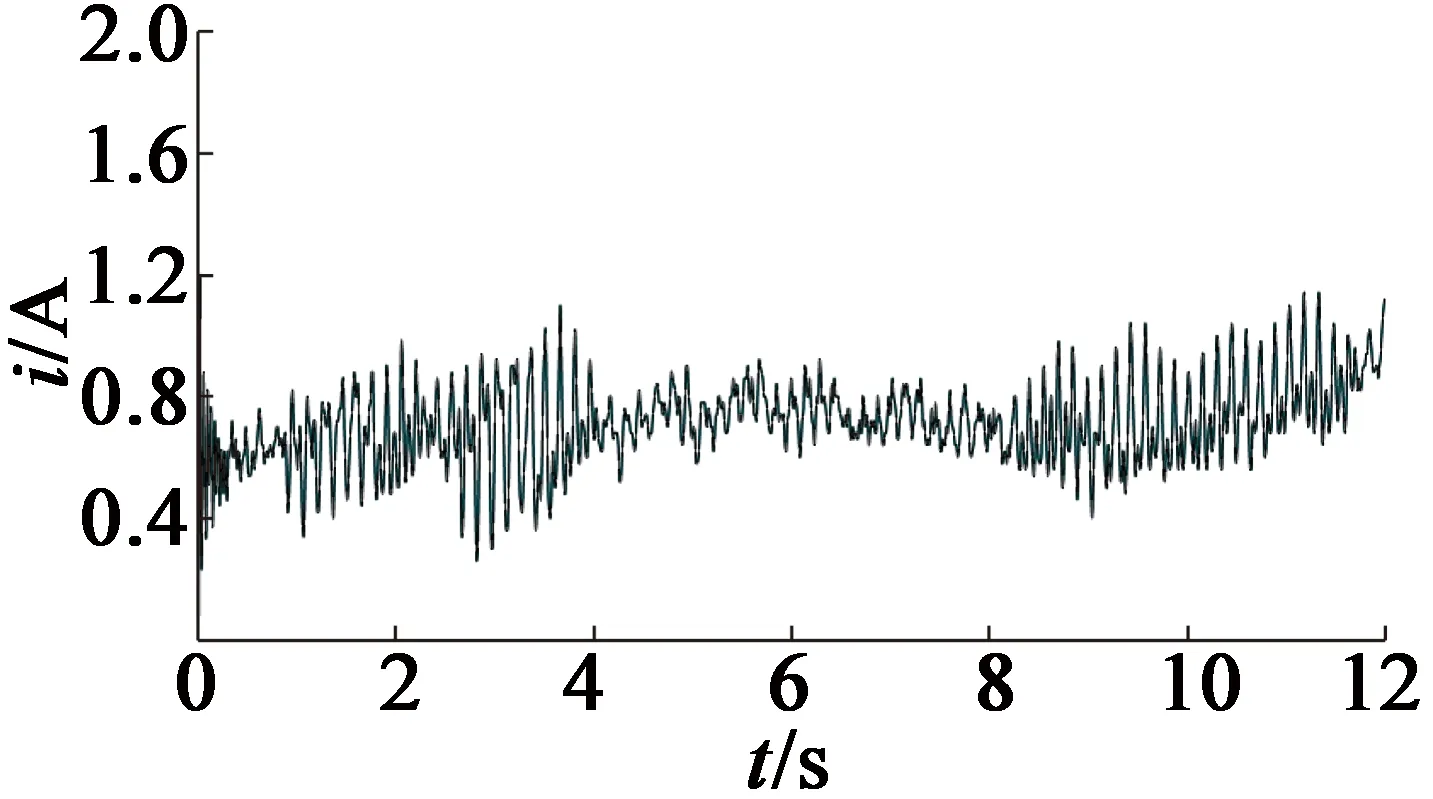
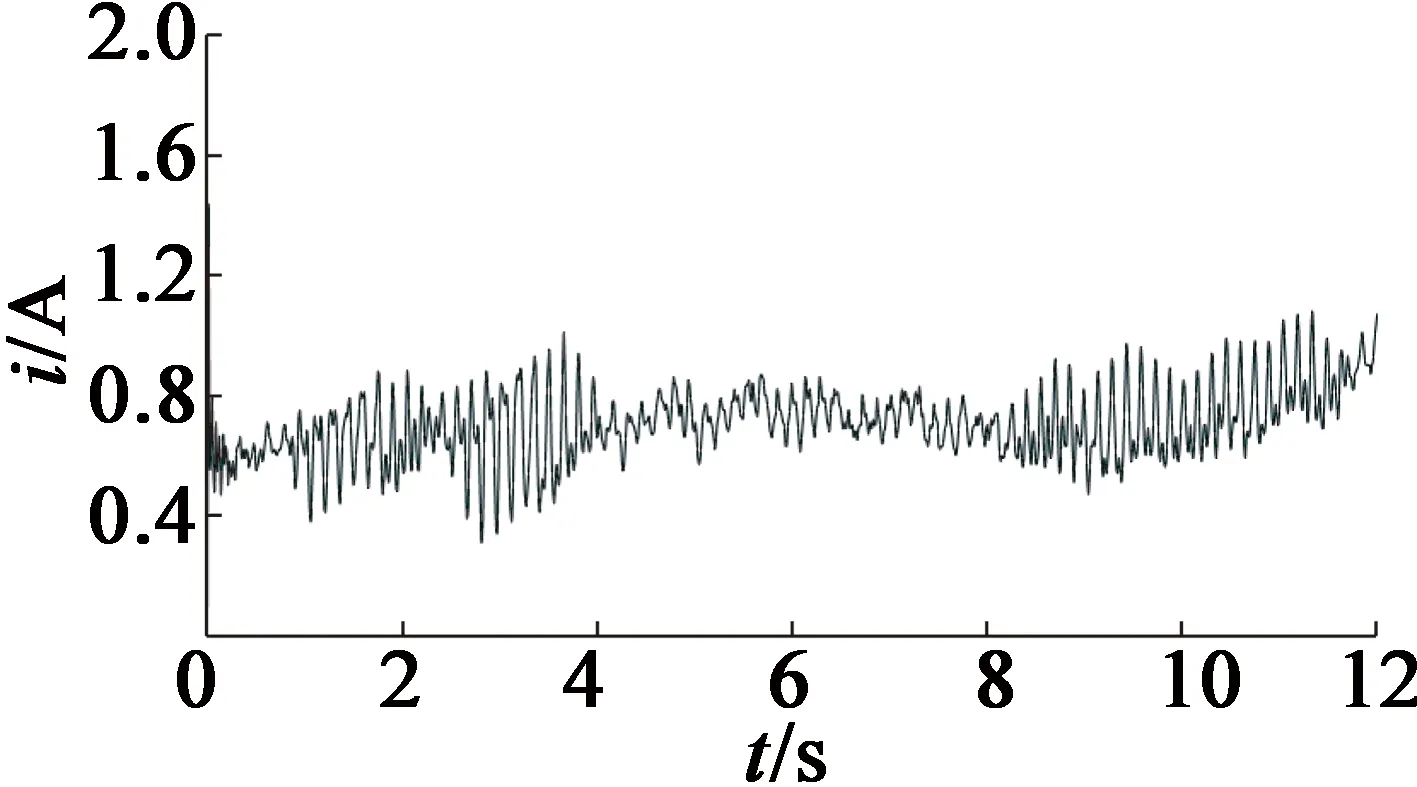
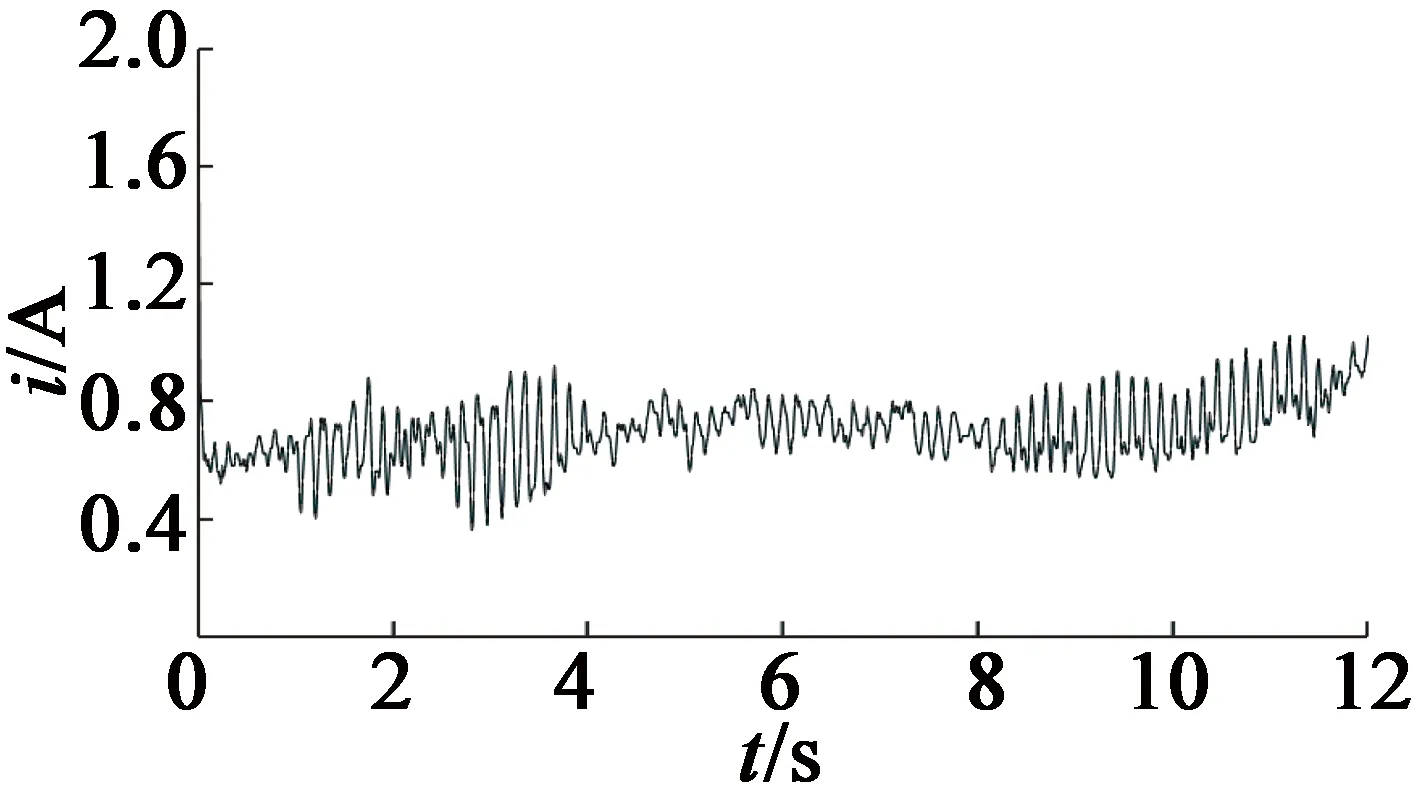
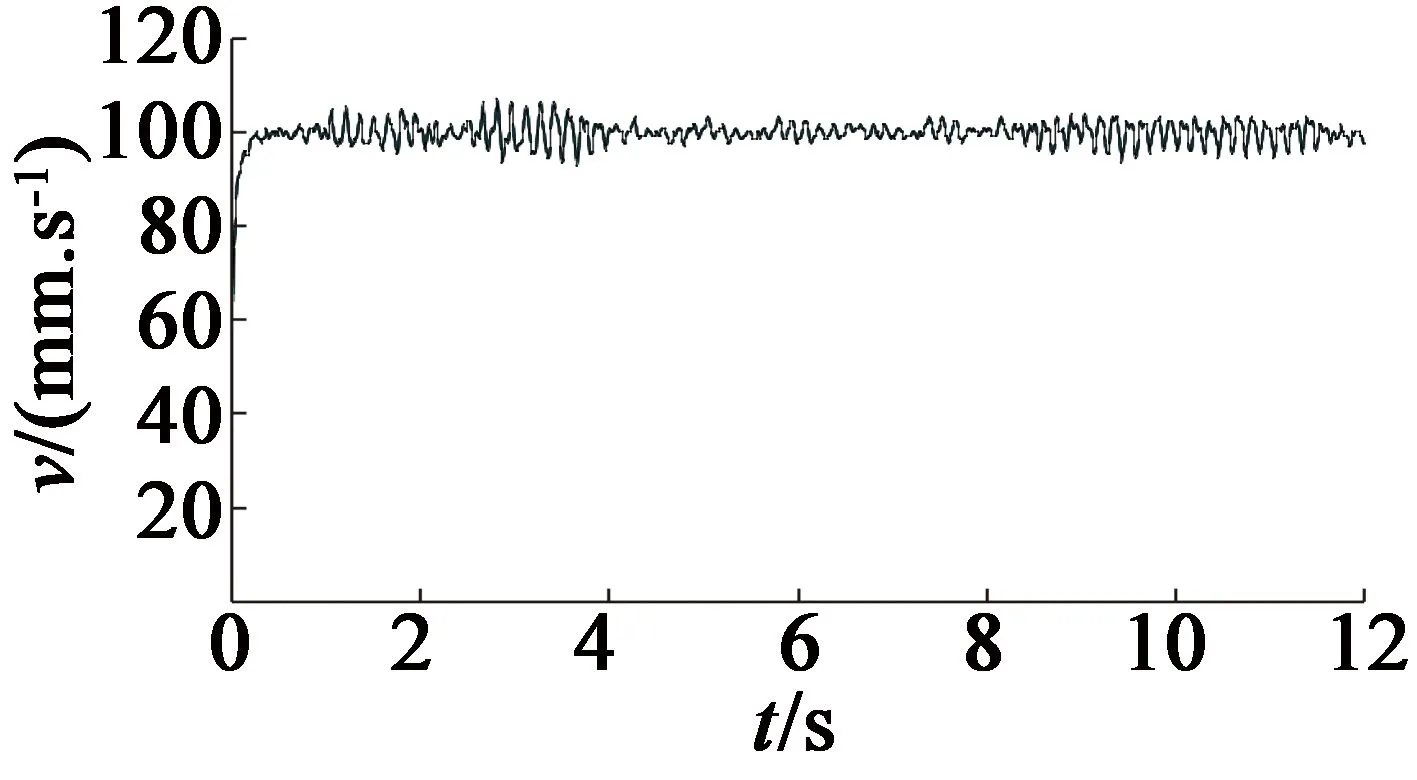
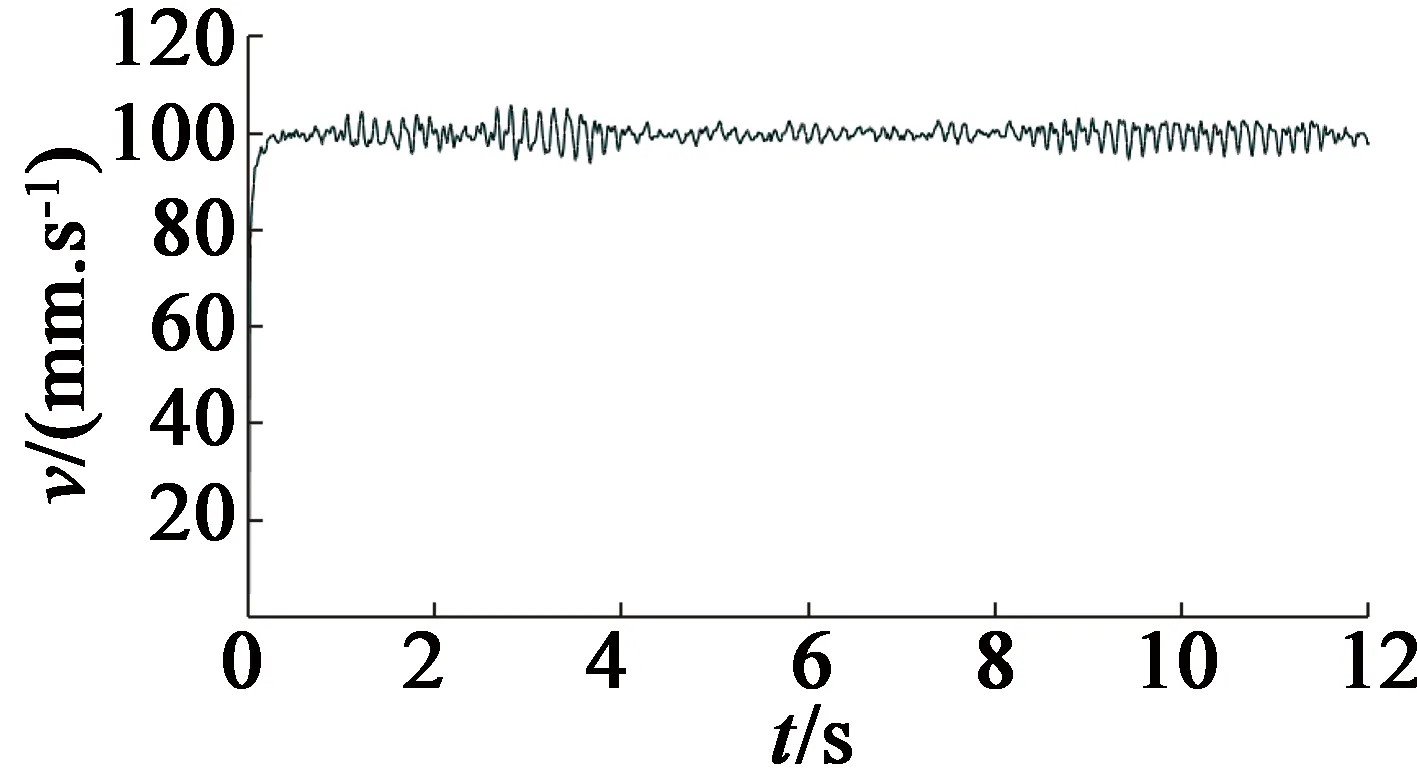
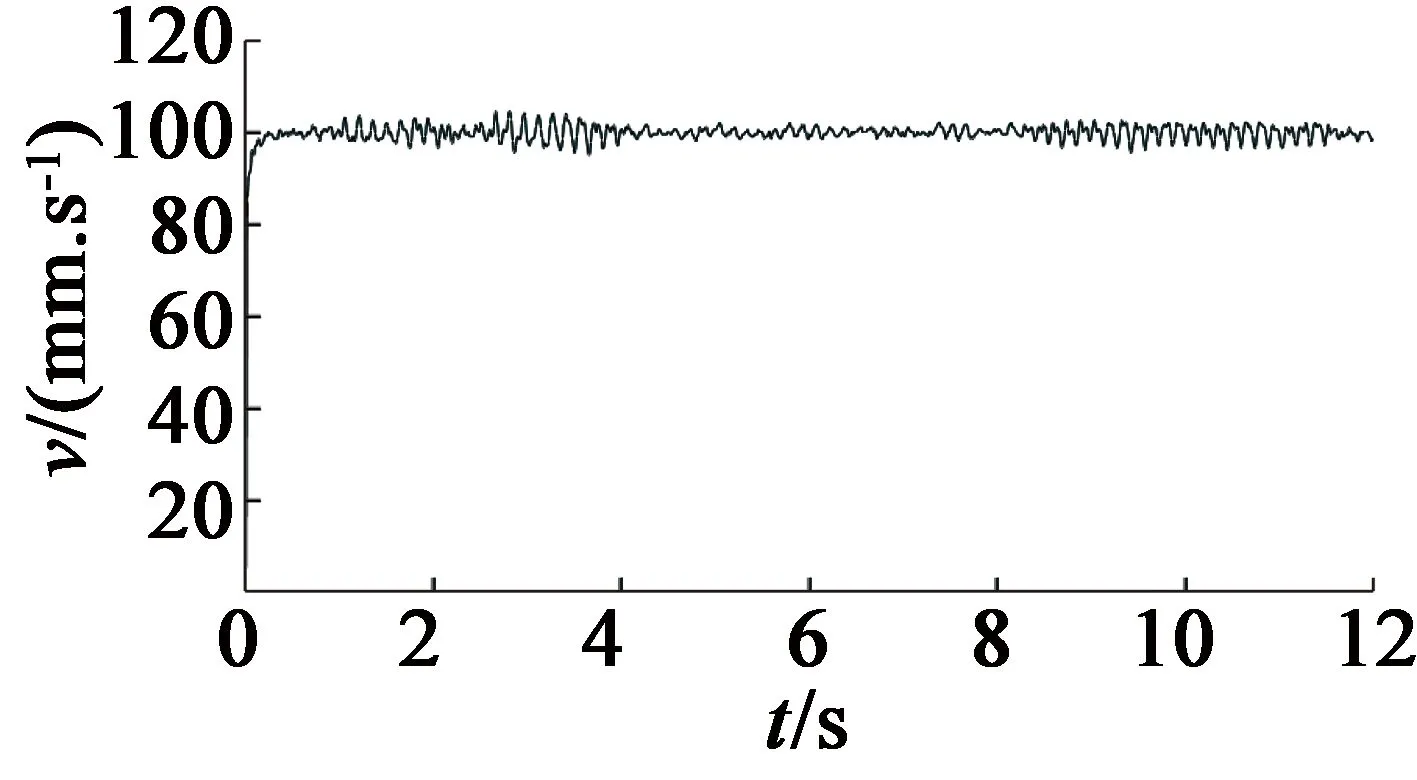
实验在直线电动机从空载阶跃起动至稳定运行在100 mm/s速度下,对单矢量MPC、占空比MPC和改进双矢量MPC分别进行实验并分析各自的控制效果。图11、图12分别为三种控制策略下直线电动机从起动到稳定运行状态下的q轴电流波形与速度曲线。
起动阶段,比较三种控制策略下的电流响应时间,改进双矢量MPC控制下的电流起动更快、更平稳。比较三种控制策略下的速度响应时间,改进双矢量MPC控制下电机起动速度更快、更平稳,电机速度达到100 mm/s的时间约为0.06 s,单矢量MPC和占空比MPC控制下电机起动时间分别约为0.1 s和0.08 s。
稳定运行阶段,改进双矢量MPC控制下的电流调节优于另外两种控制策略,表明对于内部干扰如推力波动等,有更好的抑制作用,如图11所示。其控制下的电机速度运行更稳定,最大速度波动范围约为5%,单矢量MPC、占空比MPC控制下最大速度波动范围约为6%与8%,如图12所示。
(a) 单矢量MPC
(b) 占空比MPC
(c) 改进双矢量MPC
(a) 单矢量MPC
(b) 占空比MPC
(c) 改进双矢量MPC
6 结 语
针对单矢量MPC与占空比MPC在电压矢量选择上的局限,提出改进双矢量MPC电流控制策略,结论如下:
1)选择电压矢量时,分别通过预先判断其所处扇区和预测误差,将遍历电压矢量次数从14次减小至9次,理想情况下最少只需3次,大幅降低了算法的计算量,提高了系统运行的实时性。
2)该控制策略下,电压矢量选择范围增大,因而选择的电压矢量更准确。实验结果表明,电机起动速度快且平稳,稳定运行时速度波动小,表明在系统面对推力波动等干扰时,电流环有更好的调节能力和跟踪性能。